Предлагаемое ручное выдвижное устройство может быть использовано в различных областях техники для воздействия на органы управления приборов, аппаратов и систем, лежащие вне среды действия руки оператора и, в частности, в космической технике для управления системами космического корабля пилотом, находящимся в привязной системе кресла.
Известны выдвижные устройства, предназначенные для использования на космических аппаратах, состоящие из неподвижных и подвижных элементов, фиксирующих устройств и пружины. (см. патент Англии №1322186 по кл. F2F за 1973 г.)
Из известных выдвижных устройств наиболее близким по технической сущности является выдвижная штанга, описанная в патенте Англии №1322241 по кл. B7W за 1975 г. (в дальнейшем принимается за прототип).
Это выдвижное устройство имеет жесткий неподвижный трубчатый элемент, закрепленный в держателе, и подвижный элемент, которые связаны между собой пружиной. В сложенном положении ось подвижного элемента параллельна оси неподвижного. Для фиксации в развернутом положении неподвижный трубчатый элемент имеет наконечник, который взаимодействует с углублением подвижного элемента.
Недостатком данного выдвижного устройства является то, что под действием пружины выдвижение подвижного элемента происходит резко по радиусу, что не позволяет использовать его в ограниченном в боковом и вертикальном направлениях объеме. К тому же данное выдвижное устройство не позволяет получать переменную длину в развернутом виде, не изменяя длины подвижного элемента.
Целью настоящего изобретения является получение дискретной переменной длины выдвижного устройства, обеспечение возможности работы оператору в ограниченном в боковом и вертикальном направлениях объеме с органами управления и увеличение плавности выдвижения подвижного элемента.
Указанная цель достигается тем, что в известном выдвижном устройстве, состоящем из жестких пустотелого неподвижного и подвижного элементов, пружины и фиксирующих элементов, подвижный элемент и пружина размещены внутри пустотелого неподвижного элемента, на одном конце которого выполнен внутренний буртик, а на боковой поверхности - паз с фиксирующими вырезами, причем один конец подвижного элемента выходит из неподвижного пустотелого элемента, а другой снабжен кольцевым уступом и жестко с ним связанным стопорным рычагом, взаимодействующим с фиксирующими вырезами, при этом пружина поджата между внутренним буртиком неподвижного пустотелого элемента и кольцевым уступом подвижного элемента.
Кроме того, с целью исключения соскальзывания конца подвижного элемента с гладких поверхностей органов управления, подвижный элемент снабжен эластичным наконечником.
На чертеже изображены:
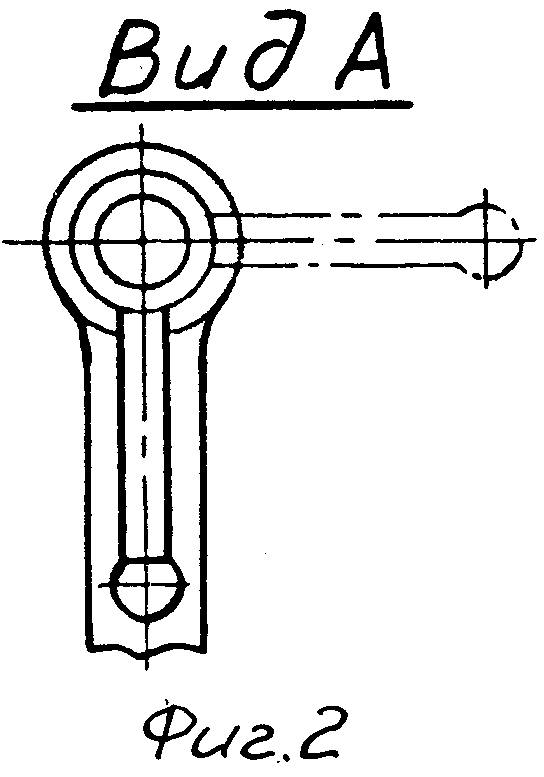
фиг.1 - общий вид ручного выдвижного устройства с выдвинутым подвижным элементом с частичным вырезом корпуса неподвижного пустотелого элемента, пунктиром показаны стопорный рычаг с подвижным элементом в убранном положении;
фиг.2 - вид слева, пунктиром показано положение стопорного рычага в пазу.
Ручное выдвижное устройство состоит из неподвижного пустотелого элемента 1, в котором выполнены паз 2 с фиксирующими вырезами 5 и внутренний буртик 4.
Внутри элемента 1 находятся пружина 5 и подвижный элемент 6 с кольцевым уступом 7, эластичным наконечником 8 и стопорным рычагом 9. Неподвижный элемент снабжен рукояткой 10.
Стопорный рычаг 9 имеет возможность поворачиваться на 90° из вертикального положения в горизонтальное и передвигаться по пазу 2 от одного фиксирующего выреза 5 к другому вместе с подвижным элементом 6, выдвигая или убирая его. При передвижении стопорного рычага 9 из одного фиксирующего выреза 5 в другой дискретно меняется общая длина выдвижного устройства.
Выдвижение подвижного элемента 6 осуществляется рукой оператора через стопорный рычаг 9, преодолевая сопротивление пружины растяжения 5 и обеспечивая, тем самым, плавность выдвижения подвижного элемента 6.
Размещение пружины 5 и подвижного элемента 6 внутри пустотелого элемента 1 исключает движение подвижного элемента по радиусу, что обеспечивает возможность работы с данным выдвижным устройством в ограниченном объеме.
Принцип действия ручного выдвижного устройства понятен из приведенного чертежа.
Чтобы выдвинуть подвижный элемент 6, надо повернуть стопорный рычаг 9 на 90° из вертикального положения в горизонтальное (см. фиг.2), усилием руки, снимая пружину 5, передвинуть рычаг 9 вперед по пазу 2 и перевести рычаг 9 в вертикальное положение.
Чтобы убрать подвижный элемент 6, надо в одном из передних фиксирующих вырезов 5 повернуть стопорный рычаг 9 из вертикального положения в горизонтальное. Под действием пружины 5 подвижный элемент 6 автоматически уберется.
Ручное выдвижное устройство облегчает работу операторов, находящихся в привязной системе кресла, с органами управления космического корабля, а также исключает применение дорогостоящих переносных пультов управления, которые к тому же из условий конструкции не всегда можно разместить в космическом аппарате.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЪЕКТОР КАРПУЛЬНЫЙ ОДНОРАЗОВЫЙ | 2010 |
|
RU2459639C2 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167084C1 |
| Намоточное устройство | 1981 |
|
SU1034810A2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167083C1 |
| СТРЕЛКОВОЕ ОРУЖИЕ С НЕПРЕРЫВНЫМ РЕЖИМОМ СТРЕЛЬБЫ (ВАРИАНТЫ), ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ ОДНОВРЕМЕННОГО СНИЖЕНИЯ ОТДАЧИ И УРОВНЯ ЗВУКА СТРЕЛКОВОГО ОРУЖИЯ | 2003 |
|
RU2254539C1 |
| САМОРЕГУЛИРУЕМОЕ ОПОРНО-ДВИГАТЕЛЬНОЕ УСТРОЙСТВО | 1997 |
|
RU2127576C1 |
| УСТРОЙСТВО ДЛЯ ВЫДВИЖЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ИЗ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2302981C2 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| Подъемник | 1985 |
|
SU1351874A1 |
Изобретение относится к области космической техники. Устройство содержит трубчатый корпус, подвижно соединенный со штоком, снабженным фиксатором положения. Шток вставлен в корпус и соединен с ним пружиной. Фиксатор выполнен в виде прикрепленного к штоку рычага, контактирующего с продольной прорезью, выполненной на корпусе, и взаимодействующего с ее поперечными пазами. Технический результат - обеспечение воздействия космонавта на элементы космического аппарата. 2 ил.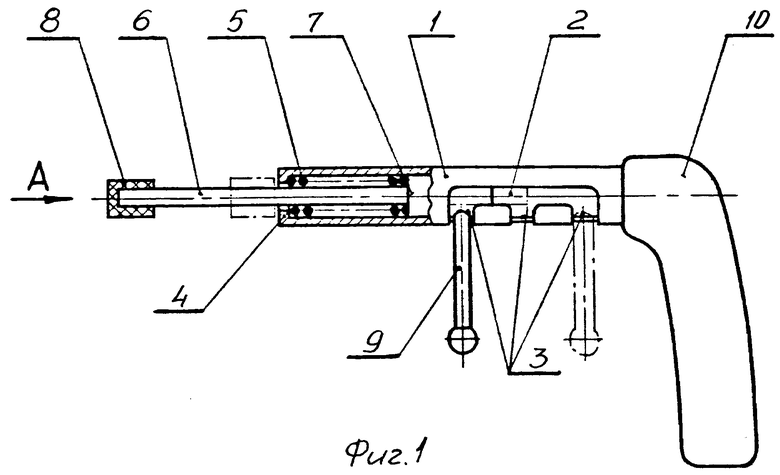
1. Ручное устройство для дистанционного воздействия на элементы космического аппарата, содержащее трубчатый корпус, подвижно соединенный со штоком, снабженным фиксатором положения, отличающееся тем, что с целью обеспечения воздействия космонавта на элементы космического аппарата, находящиеся на различных от него расстояниях, шток вставлен в корпус и соединен с ним пружиной, а фиксатор выполнен в виде прикрепленного к штоку рычага, контактирующего с продольной прорезью, выполненной на корпусе, и взаимодействующего с ее поперечными пазами.
2. Устройство по п.1, отличающееся тем, что шток снабжен эластичным наконечником.
| Устройство для подачи длинномерного материала в зону обработки | 1986 |
|
SU1323186A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

