Предлагаемое изобретение относится к классу систем, измеряющих направление на объект, и, в частности к радиопеленгаторам для определения направления /пеленга/, с которого поступают электромагнитные волны путем сравнения амплитуд сигналов, поступающих одновременно с приемных антенн или антенных систем, имеющих различным образом ориентированные диаграммы направленности.
Предлагаемый автоматический высокопотенциальный (загоризонтный) пеленгатор предназначен для получения с большой достоверностью в реальном масштабе времени информации о пеленге и параметрах сигналов и последовательностей сигналов источников излучения с неизменяющейся и изменяющейся от импульса к импульсу несущей частотой. Пеленгатор может быть использован в системах пассивного целеуказания (СПЦУ), работающих в сложном радиолокационном поле и использующих для приема сигналов эффект ДТР.
Рассматриваемые пеленгаторы имеют следующие дополнительные ограничения и особенности:
1. Пеленгаторы содержат одну пеленгационную и n компенсационных антенн в каждом частотном диапазоне, и соответственно n+1 идентичных приемных трактов для исключения влияния боковых лепестков пеленгационной антенны. Используются амплитудные методы компенсации (Решение о пеленге принимается только в том случае, когда сигнал с выхода пеленгационной антенны превышает сигнал с выходов каждой компенсационной антенны и не принимается, если сигнал с выхода любой компенсационной антенны превышает сигнал с выхода пеленгационной антенны).
2. Пеленгование источников излучения выполняется "на проходе", т.е. без остановки антенны. Вследствие этого количество принимаемых импульсов от каждого источника излучения ограниченно временем прохождения паленгационной антенной ширины своей диаграммы направленности.
3. Одновременно с пеленгованием выполняется определение параметров сигналов (ПС) и параметров последовательностей сигналов (ППС).
4. Решение о пеленге источника, ПС и ППС принимается одновременно по результатам автоматической обработки принимаемой, информации с использованием логики типа "к" из "m" (например "5" из "5").
Известно, что решение перечисленных задач (п.2, 3, 4) возможно в пеленгаторах с поисковыми или беспоисковыми приемными устройствами (ППУ или БПУ) в пеленгационных и компенсационных трактах, а также с соответствующими устройствами обработки для определения пеленга, ПС и ППС. Пеленгатор, содержащий только ППУ в пеленгационных и компенсационных трактах, реализован в изделии "Титанит" ГК1.640.001 ТО/с. Пеленгатор в каждом диапазоне состоит из пеленгационной и двух компенсационных антенн, выходы которых через соответствующие ППУ супергетеродинного типа подключены к устройству обработки. Пеленгование источника излучения осуществляется при непрерывном пространственном и частотном поиске сигналов. Решение о пеленге принимается по результатам обработки "к" из "m" принятых пеленгационным каналом импульсов. Значение пеленга определяется с помощью механически связанного с пеленгационной антенной датчика угла, сигнал которого заводится на устройство обработки.
Пеленгаторы, содержащие только ППУ в пеленгационных и всех компенсационных трактах, достаточно компактны, надежны, имеют высокую чувствительность. СВЧ часть таких приемников может быть выполнена в виде СВЧ-модулей, которые легко размещаются на вращающейся части антенного поста. Однако пеленгаторы, содержащие только ППУ, имеют малую (порядка 0.1) вероятность пеленгования источников сигналов с перестраивающейся от импульса к импульсу несущей частотой, так как полоса пропускания ППУ должна быть достаточно узкой для обеспечения высокой чувствительности (под вероятностью пеленгования здесь и в дальнейшем понимается отношение количества прохождений пеленгационной антенной направления на цель, в которых было принято решение о пеленге, к общему количеству прохождения антенны направления на цель).
Теоретически может быть построен пеленгатор, содержащий, только многоканальные БПУ в пеленгационных и всех компенсационных трактах.
Пеленгование источника излучения в таком пеленгаторе осуществляется при непрерывном пространственном поиске сигналов. Частотный поиск в пеленгаторе отсутствует - высокая чувствительность обеспечивается многоканальной частотной расфильтровкой. Решение о пеленге и определение направления на цель (пеленг) в пеленгаторе с БПУ производится так же, как и в пеленгаторе с ППУ. Но благодаря тому, что отношение мгновенной полосы БПУ к частотному диапазону пеленгатора равно 1, пеленгаторы с БПУ в пеленгационном и всех компенсационных трактах обеспечивают большую вероятность пеленгования источников сигналов с перестраиваемой несущей частотой. Однако реализация такого пеленгатора на подвижных носителях практически невозможна из-за большого веса СВЧ-части приемника (усилители на ЛБВ), малого динамического диапазона и трудностей сопряжения амплитудных и частотных характеристик пеленгационных и компенсационных трактов.
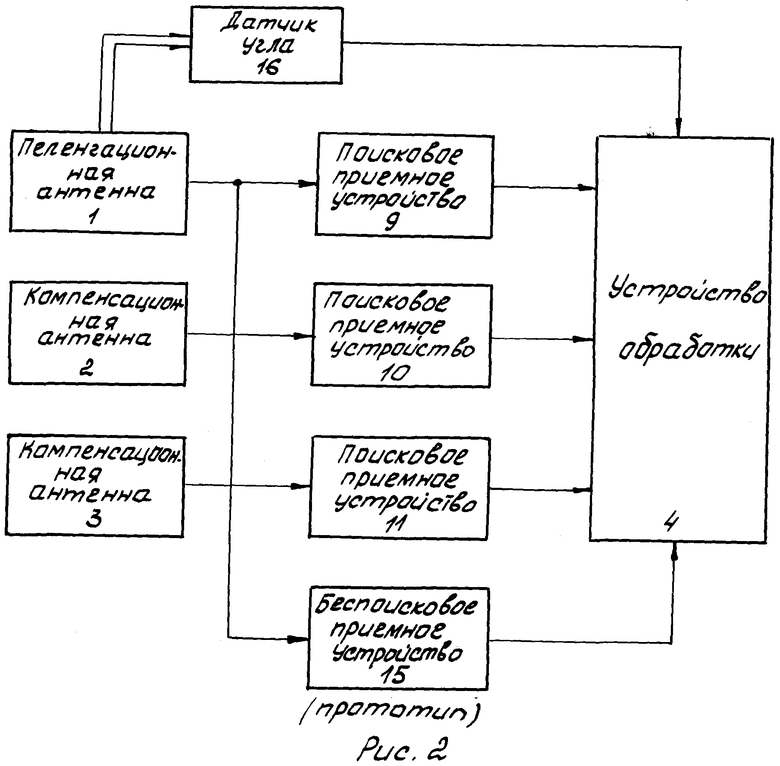
Известный пеленгатор состоит из пеленгационной (1) и компенсационных (2, 3) антенн, n+1 ППУ (9, 10, 11) устройство обработки (4) в которое входят измеритель параметров сигналов ППУ, измеритель параметров сигналов БПУ, измеритель параметров последовательностей сигналов, устройство принятия решения, схема сравнения, формирователь и соответствующие ключи.
Первые n+1 входов устройства обработки (4) через соответствующие, n+1 ППУ подключены к выходам соответствующих n компенсационных и пеленгационной антенны. Второй вход устройства обработки через БПУ (15) подключен параллельно ППУ (9) к выходу пеленгационной антенны (1). Третий выход подключен к выходу механически связанного с пеленгационной антенной датчика угла (16).
Пеленгатор работает следующим образом.
Пеленгационная и компенсационные антенны, вращаясь в азимутальной плоскости, осуществляют пространственный поиск сигналов.
Поисковые приемные устройства осуществляют частотный поиск в заданном диапазоне (рис.4а). По результатам решения задачи компенсации устройство обработки открывает на время mTmax нормально закрытое беспоисковое приемное устройство (БПУ) в канале пеленгования.
Первый сигнал с выхода поискового приемника (рис.4б) и m-1 сигналов с выхода БПУ (рис.4в) поступают на устройство обработки, где измеряются их параметры и формируется последовательность из "m" сигналов (рис.4г) с одинаковыми параметрами (например, длительностью). Если длина сформированной последовательности достаточна для обеспечения логики "к" из "m" устройство обработки принимает решение о мгновенном пеленге (αi) принятого излучения (рис.4д).
Значение мгновенного пеленга определяется по результатам обработки сигнала, поступающего с датчика угла (рис.4е).
В качестве поисковых приемников (ППУ) в прототипе могут использоваться приемные устройства прямого усиления с узкополосными перестраиваемыми ЖИГ-фильтрами на входе. Пеленгаторы с такими ППУ достаточно просты, компактны и надежны, однако применение их в ряде случаев затруднено по следующим причинам:
1. Пеленгаторы с ППУ прямого усиления во всех n-каналах, в которых основное усиление до детектора выполняется вне вращающегося антенного поста, требует для канализации энергии с антенного поста (АП) - вращающихся СВЧ-переходов с высокими взаимными развязками в одном диапазоне.
При необходимости обеспечить круговое вращение АП техническая реализация таких n+1-канальных СВЧ-переходов представляет сложную инженерную проблему. Сложность решения этой задачи неизмеримо возрастает для многодиапазонных пеленгаторов.
2. Применение ППУ прямого усиления в каждом диапазоне многодиапазонного пеленгатора с одним вращающимся АП требует применение СВЧ-усилителей в каждом приемнике, что, в случае использования в качестве усилителей ЛБВ, значительно увеличивает вес и усложняет конструкцию АП.
3. Использование узкополосных (менее 10 МГц) перестраиваемых ППУ в каждом из n+1 каналов требует тщательного сопряжения текущих настроек всех каналов в условиях применения, что также является достаточно трудной задачей.
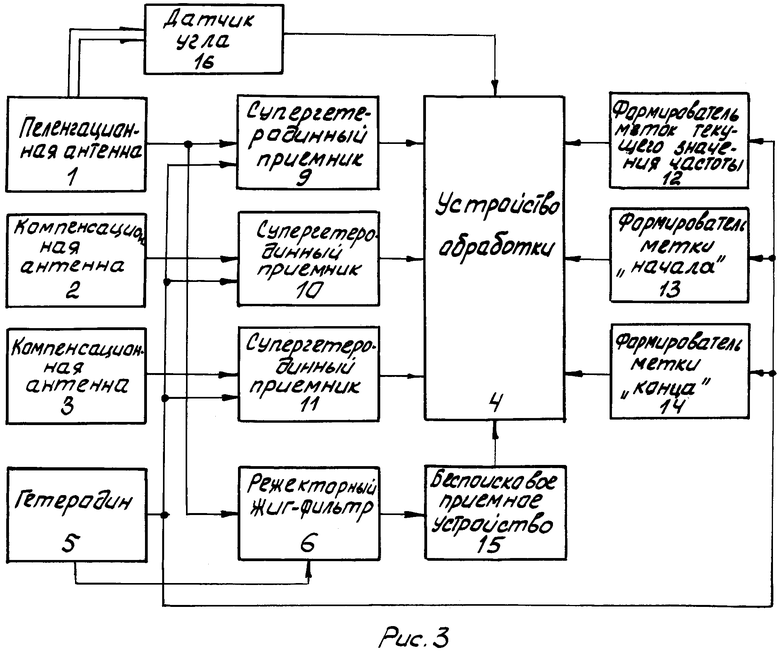
В силу перечисленных выше причин для пеленгаторов с числом каналов компенсации n≥2, а также для многодиапазонных пеленгаторов предпочтительным является применение ППУ супергетеродинного типа (СГП) (см. рис.3).
Применение СГП требует введения в пеленгатор дополнительно следующих устройств:
перестраиваемого по частоте гетеродинного устройства (ГУ) (5) с устройством, управляющим перестройкой генератора, формирователя меток текущего значения частоты (12), формирователя метки "начала" (13) и формирователя метки "конца" (14), служащих для определения несущей частоты входных сигналов, заграждающего (режекторного) ЖИГ-фильтра (6), перестраиваемого синхронно с перестройкой частоты ГУ (5) и служащего для устранения частотной парализации БПУ паразитным сигналом гетеродина.
Применение СГП позволяет свести число каналов канализации СВЧ энергии до двух в каждом диапазоне независимо от числа каналов компенсации.
Применение СГП позволяет также облегчить и упростить конструкцию АП, исключив СВЧ усилители из приемников и заменив додетекторные усиления на СВЧ (ЛБВ), усилением по промежуточной частоте (УПЧ в микроисполнении).
Пеленгатор осуществляет пространственный поиск с помощью вращающихся пеленгационной и компенсационных антенн (1, 2, 3) Перестройка СГП (9, 10, 11) по частоте осуществляется с помощью сигнала сканирующего по частоте гетеродина (5). Определение параметров сигналов и последовательностей сигналов, а также пеленгование источника производится таким же образом, как изображено на рис.4. Кроме того, в прототипе заложена возможность определять несущую частоту принятых СГП (9) сигналов с помощью информации о частоте гетеродина, поступающей на устройство обработки (4) от формирователей меток текущего значения частоты (12) формирователя метки "начала" (13) и формирователя метки "конца" (14). Заграждающий ЖИГ-фильтр (6) управляется сигналом, вырабатываемым гетеродинным устройством (5) для перестройки частоты генерации ЛОВ, и предназначен для подавления парализующего сигнала гетеродина, попадающего на вход БПУ(15).
Однако прототип с СГП в качестве ППУ, обладая вышеперечисленными преимуществами, имеет также и существенный недостаток.
Так, из-за конечных развязок между практами СГП и БПУ по рабочим цепям и по эфиру возможен «пролаз» сигнала гетеродина (5) на вход БПУ и парализация вследствие этого каналов БПУ, что исключает возможность приема полезных сигналов в частотной области, соответствующей полосе парализованных каналов. Отсутствие же приема в любой частотной области БПУ (частотная парализация) уменьшает вероятность правильного пеленгования.
Действительно, как видно из рис.4, где для второго периода частотного поиска показан участок частотной парализации (заштрихованная область на рис.4а), если для излучения, принятого СГП (4б), из-за наличия участков частотной парализации, часть импульсов не будет принята БПУ (4в), то может не сформироваться последовательность необходимой длины (например, 5 импульсов при логике "5" из "5") (рис.4г) устройство обработки не сформирует сигнал (решение о пеленге рис.4д), определяющий совместно с сигналом датчика угла мгновенный пеленг объекта (рис.4д), определяющий совместно с сигналом датчика угла мгновенный пеленг объекта (рис.4е).
Введение перестраиваемых узкополосных заграждающих фильтров (например ЖИГ-фильтров) для исключения из БПУ парализующего сигнала гетеродина, управляемых, как показано на блок-схеме прототипа (рис.3), сигналом перестройки гетеродина (ЛОВ) гетеродинного устройства, связано с трудностями стабилизации начальной частоты настройки фильтра в условиях применения и сопряжения закона перестройки фильтра с нелинейным законом перестройки гетеродина (ЛОВ). Избавиться от этих трудностей можно путем расширения полосы заграждающего фильтра, однако увеличение полосы фильтра увеличивает область частотной парализации БПУ (теперь уже полосой заграждения) и, соответственно, понижает вероятность пеленгования (вероятность определения мгновенного пеленга).
Целью настоящего изобретения является устранение указанного недостатка, а именно, повышение вероятности пеленгования источников сигналов с неизменяющейся и изменяющейся от импульса к импульсу несущей частотой за счет уменьшения области частотной парализации беспоискового приемного устройства.
Эта цель достигается тем, что в известный пеленгатор, состоящий из пеленгационной и n компенсационных антенн, гетеродинного устройства и устройства обработки, первые n+1 входов которого через n+1 супергетеродинных приемников подключены к выходам соответствующих n компенсационных и пеленгационной антенны, вторые три входа соответственно через формирователь меток текущего значения частоты, формирователь метки "начала" и формирователь метки "конца" подключены к соединенному со вторыми выходами всех n+1 супергетеродинных приемников выходу гетеродина, третий вход через беспоисковое приемное устройство заграждающий ЖИГ-фильтр подключен параллельно супергетеродинному приемнику к выходу пеленгационной антенны и четвертый - к выходу механически связанного с пеленгационной антенной датчика угла, - дополнительно введены электрически сопряженный с упомянутым заграждающим фильтром пропускающий ЖИГ-фильтр и цифроаналоговый преобразователь, первый вход которого через устройство частотной привязки и пропускающий ЖИГ-фильтр подключен к выходу упомянутого гетеродина, второй вход - к выходу упомянутого формирователя меток текущего значения частоты и третий - к выходу упомянутого формирователя метки "конца", а выход - ко вторым входам заграждающего и пропускающего ЖИГ-фильтров.
Введение пропускающего ЖИГ-фильтра, электрически сопряженного с заграждающим, совместно с устройством частотной привязки позволяет обеспечить начальную привязку частоты гетеродина и частоты настройки заграждающего ЖИГ-фильтра в условиях применения, т.е. позволяет уменьшить зону частотной парализации БПУ на величину частотных уходов фильтра в условиях применения.
Введение ЦАП позволяет сопрячь законы перестройки гетеродина и заграждающего ЖИГ-фильтра, уменьшить зону частотной парализации БПУ на величину ошибок несопряжения.
Как видно из рис.4, вероятность пеленгования зависит от величины области частотной парализации БПУ и уменьшение последней приводит к соответствующему увеличению вероятности пеленгования.
На чертеже рис.1 представлена блок-схема заявляемого пеленгатора СПЦУ. В качестве примера рассмотрен вариант однодиапазонного пеленгатора с двумя компенсационными антеннами.
На чертежах рис.2 и рис.3 представлены блок-схемы прототипа в общем случае и в случае применения в качестве ППУ супергетеродинных приемников (СГП). На чертеже рис.4 представлены время-частотные диаграммы работы пеленгатора СПЦУ.
Пеленгатор (см. рис.1) состоит из пеленгационой (1) и компенсационных (2, 3) антенн устройства обработки (4) гетеродинного устройства (5) заграждающего (6) и электрически сопряженного с ним пропускающего ЖИГ-фильтра (7) и цифроаналогового преобразователя (ЦАП (8)). Первые три входа устройства обработки (4) через три соответствующие СГП (9, 10, 11) подключены к выходам соответственно пеленгационной и двух компенсационных антенн. Вторые три входа устройства обработки (4) соответственно через формирователь меток текущего значения частоты (12), формирователь метки "начала" (13) и формирователь метки "конца" (14) подключены к соединенному со вторыми входами СГП (9, 10, 11) выходу гетеродина (5). Третий вход устройства (4) через БПУ (15) и заграждающий фильтр (6) подключен параллельно СГП (9) к выходу пеленгационной антенны (1) и четвертый вход - к выходу механически связанного с пеленгационной антенной (1) датчика угла (16).
Первый вход ЦАП (8) через устройство частотной привязки (17) и пропускающий фильтр (7) подключен к выходу гетеродина (5). Второй вход ЦАП (8) подключен к выходу формирователя (12) и третий - к выходу формирователя (14). Выход ЦАП (8) подключен ко вторым входам заграждающего (6) и пропускающего (7) ЖИГ-фильтров.
Пеленгатор работает следующим образом:
Пеленгационная (1) и компенсационные (2, 3) антенны вращаясь в азимутальной плоскости осуществляют пространственный поиск сигналов. Одновременно поисковые СГП (9, 10, 11) перестраиваясь по частоте с помощью подаваемого на них сигнала гетеродина (5) осуществляют частотный поиск сигналов в заданном диапазоне частот. Принятые антеннами (1, 2, 3) сигналы усиливаются и, детектируются в СГП (9, 10, 11), и поступают на устройство обработки (4). Кроме того, принятые пеленгационной антенной (1) сигналы поступают также на заграждающий ЖИГ-фильтр (6). Сюда же вместе с полезными сигналами поступает просачивающийся по рабочим цепям и по эфиру парализирующий сигнал гетеродина (5). Режекторный ЖИГ-фильтр (6) и сопряженный с ним пропускающий ЖИГ-фильтр (7) в исходном состоянии настроены на любую близкую к краю диапазона пеленгатора частоту. Частотные уходы обоих фильтров в условиях применения, благодаря их электрической сопряженности, одинаковы.
На вход пропускающего фильтра (6) заводится СВЧ сигнал гетеродина (5), частота которого, при перестройке, в какой-то момент времени попадает в полосу пропускания фильтра (независимо от величины частотного ухода). При этом с выхода фильтра (7) на устройство частотной привязки (17) поступает сигнал. Устройство частотной привязки вырабатывает "сигнал запуска" свидетельствующий о том, что в данный момент времени частота сигнала гетеродина (5) и частота настроек фильтров (6) и (7) совпали. "Сигнал запуска" поступает на соответствующий вход ЦАП (8) и запускает его. На другой вход ЦАП (8) с момента включения гетеродина (5), поступают счетные метки, вырабатываемые формирователем (12) и несущие информацию о частоте гетеродина.
Появление каждой метки соответствует приращению частоты гетеродина на определенную постоянную величину (например, 20 МГц). После появления "сигнала запуска" ЦАП (8) начинает вырабатывать по каждой приходящей "счетной метке" приращения "управляющего сигнала", величина которого соответствует перестройке ЖИГ-фильтров (6, 7) на величину равную приращению частоты гетеродина (20 МГц). "Управляющий сигнал" с выхода ЦАП подается на магнитную систему ЖИГ-фильтров (6, 7) и перестраивает их по каждой "счетной метке".
Таким образом заграждающий ЖИГ-фильтр на протяжении цикла частотного поиска настроен на частоту парализующего сигнала гетеродина и давит его, пропуская на вход БПУ (15) только полезные сигналы. В БПУ осуществляется разделение принятых сигналов на частотные каналы с последующим их дектированием и усилением.
Выход БПУ нормально закрыт в устройстве обработки (4). При превышении уровня сигнала, принятого пеленгационной антенной (1) над уровнями сигналов, принятых каждой из компенсационных антенн (2, 3), в устройстве обработки (4) вырабатывается сигнал, открывающий выход БПУ на время mTmax.
Устройство обработки измеряет, параметры поступающих от БПУ (15) сигналов, сравнивает их с параметрами сигнала поступившего от СГП (9) и формирует последовательность из m сигналов, в которой первый сигнал является сигналом от СГП (9), а остальные (m-1) - от БПУ (15). При достаточной длине сформированной последовательности (с учетом обеспечения заданной логики "к" из "m") устройство обработки принимает решение о мгновенном пеленге и параметрах последовательности сигналов, а также вырабатывает сигнал, определяющий совместно с сигналом, поступающим с датчика угла (16), мгновенный пеленг на источник излучения.
Информация о текущем значении частоты гетеродина, поступающая на устройство обработки (4) в виде стандартных меток от формирователей (12, 13, 14), используется для определения несущей частоты сигналов, принятых СГП (9).
После окончания каждого цикла частотного поиска с формирователя метки "конца" (14) на соответствующий вход ЦАП (8) поступает "сигнал сброса". По этому сигналу заканчивается формирование приращений "управляющего сигнала" по меткам из формирователя (12) и на выходе ЦАП устанавливается величина исходного "управляющего сигнала" соответствующая начальной настройке ЖИГ-фильтров (6, 7).
В следующем цикле частотного поиска перестройка фильтров (6 7) начинается опять после появления "сигнала запуска".
Таким образом, применение в пеленгаторе, содержащем БПУ и СГП, заграждающего ЖИГ-фильтра с устройствами сопряжения (пропускающий ЖИГ-фильтр, ЦАП и устройство частотной привязки) позволяет увеличить вероятность пеленгования источников излучения.
Указанная вероятность увеличивается путем уменьшения в предлагаемом пеленгаторе области частотной парализации БПУ.
В процессе разработки предлагаемого пеленгатора было проведено необходимое макетирование. Макетировался пеленгатор с многоканальным БПУ с числом каналов l=15, полосой каждого канала Δf=60 МГц при общей полосе приемника ΔF=900 МГц в 10 см диапазоне волн.
Поисковые приемные устройства в пеленгационном и двух компенсационных каналах имели полосы пропускания ΔfППУ=50 МГц.
Поисковые приемники перестраивались со скоростью 50 МГц/мсек.
В качестве гетеродина в макете использовалась лампа обратной волны типа "Георгин". В соответствии с ТУ на лампу, изменение крутизны перестройки в ней находится в пределах от 1 МГц/В до 5 МГц/В. Такого же порядка перепад крутизны имеет место и в широкополосных генераторных лампах других диапазонов волн.
Для сопряжения законов перестройки гетеродина и заграждающего ЖИГ-фильтра в пеленгаторе использовался пропускающий ЖИГ-фильтр, электрически сопряженный с заграждающим ЖИГ-фильтром.
Пропускающий ЖИГ-фильтр имел полосу пропускания, равную полосе режекции загружающего фильтра.
При макетировании использовались фильтры с полосами 20 МГц.
Устройство частотной привязки содержало видеоусилитель, детектор и пороговое устройство. Цифро-аналоговый преобразователь преобразовывал "счетные метки", вырабатываемые гетеродинным устройством, в аналоговый сигнал (ток) управляющий перестройкой ЖИГ-фильтров. Кроме того по метке "конец диапазона" он "переводил" ЖИГ-фильтры в начальное состояние.
В качестве ЦАП использовались 6 разрядный счетчик со схемой управления, дешифратор на 6 входов и 45 выходов, схема коммутации и 8 ключевых схем.
Экспериментальное исследование пеленгатора с указанными выше характеристиками показало следующее.
Вероятность пеленгования коротких последовательностей из m сигналов с использованием логики "к" из "m" (4 из 4) составила 0,63 без заграждающего ЖИГ-фильтра, 0,72 - с использованием заграждающего ЖИГ-фильтра без сопряжения законов перестройки и 0,96 с использованием ЖИГ-фильтра с устройствами сопряжения.
Эти результаты объясняются тем, что область частотной парализации БПУ без заграждающего фильтра составляла два частотных канала БПУ, т.е. 120 МГц при указанных значениях полос каналов.
Область частотной парализации при использовании заграждающего фильтра без сопряжения с перестройкой гетеродина составляла 100 МГц, а область частотной парализации при использовании заграждающего фильтра с устройствами сопряжения составляла 20 МГц.
Полученные при макетировании результаты достаточно хорошо совпадают с теоретическими расчетами, произведенными при следующих допущениях.
Распределение по частотному диапазону пеленгатора сигналов источника излучения с перестройкой по частоте - равновероятно. Обнаружение каждого импульса из принимаемой последовательности события - независимое.
При этих допущениях вероятность пеленгования (Pпеленг) определялась по известной формуле умножения вероятностей, (смотри, например, Венцель Е.С. «Теория вероятностей»).
Pпеленг=γm-1
где γ - вероятность обнаружения одного импульса в нашем случае равна
где Δfпар - область частотной парализации БПУ.
m - количество импульсов в принятой последовательности.
В формуле учтено, что первый импульс из последовательности принимается СГП. Вероятность его обнаружения равна единице.
Расчеты по приведенным формулам дают следующие значения вероятности пеленгования:
0,66; 0,7; 0,98 для рассмотренных выше случаев при логике "4" из "4".
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2021 |
|
RU2776155C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ И ПЕЛЕНГАТОР | 2010 |
|
RU2434240C1 |
| СПОСОБ ПЕЛЕНГАЦИИ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2386977C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОСИГНАЛОВ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ В КОРОТКОВОЛНОВОМ ДИАПАЗОНЕ | 2010 |
|
RU2461015C2 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| ШИРОКОПОЛОСНАЯ СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ С ВЫСОКОЙ ЧУВСТВИТЕЛЬНОСТЬЮ | 2008 |
|
RU2390946C2 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПЕЛЕНГОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
SU1840092A1 |
| СПОСОБ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 2015 |
|
RU2596018C1 |
| ПЕЛЕНГАТОР | 1993 |
|
RU2115133C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1993 |
|
RU2115134C1 |

Изобретение относится к классу систем, измеряющих направление на объект. Достигаемый технический результат изобретения - повышение вероятности пеленгования источников сигналов с неизменяющейся и изменяющейся от импульса к импульсу несущей частотой. Указанный результат достигается за счет того, что заявленный пеленгатор содержит пеленгационную антенну, датчик угла, n компенсационных антенн, n+1 супергетеродинных приемников с общим гетеродином, беспоисковый приемник, блок обработки, режекторный ЖИГ-фильтр, формирователь меток текущего значения частоты, формирователь метки «начала», формирователь метки «конца», блок частотной привязки, пропускающий ЖИГ-фильтр и цифроаналоговый преобразователь, соединенные между собой определенным образом. 4 ил.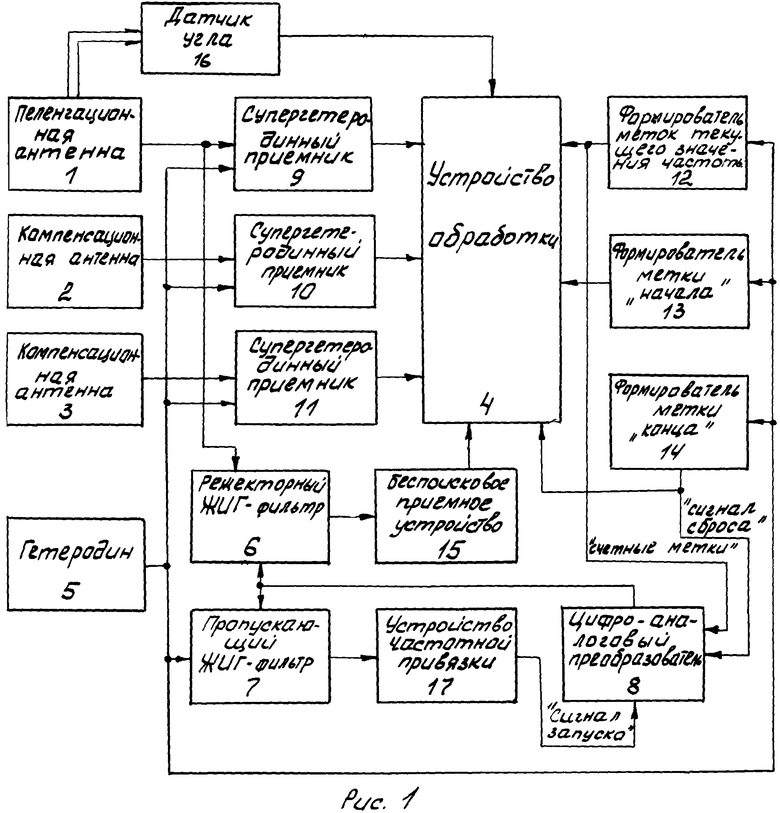
Пеленгатор систем пассивного целеуказания, содержащий пеленгационную антенну, механически связанную с датчиком угла, n компенсационных антенн, n+1 супергетеродинных приемников с общим для всех них гетеродином, беспоисковый приемник, блок обработки, режекторный ЖИГ-фильтр, формирователь меток текущего значения частоты, формирователь метки "начала", формирователь метки "конца" и блок частотной привязки, причем выходы пеленгационной антенны и всех компенсационных антенн через соответствующие им супергетеродинные приемники связаны соответственно с первыми n+1 входами блока обработки, выход пеленгационной антенны через последовательно соединенные режекторный ЖИГ-фильтр и беспоисковый приемник также связан с третьим входом блока обработки, выход датчика угла соединен со вторым входом блока обработки, выход общего гетеродина также через формирователь меток текущего значения частоты связан с четвертым входом блока обработки, через формирователь метки "начала" с пятым входом блока обработки и через формирователь метки "конца" с шестым входом блока обработки, отличающийся тем, что, с целью увеличения вероятности пеленгования источников с неизменяющейся и изменяющейся от импульса к импульсу несущей частотой, в него введены электрически сопряженный с режекторным ЖИГ-фильтром пропускающий ЖИГ-фильтр и цифроаналоговый преобразователь, причем выход общего гетеродина через последовательно соединенные пропускающий ЖИГ-фильтр, блок частотной привязки и цифроаналоговый преобразователь связан со вторыми входами режекторного и пропускающего ЖИГ-фильтров, выход формирователя меток текущего значения частоты соединен также со вторым, а формирователь метки "конца" с третьим входом цифроаналогового преобразователя.

