Предлагаемое изобретение относится к области автоматического управления и может быть использовано при проектировании и эксплуатации систем сопровождения радиолокационных станций (РЛС) с автоматическим сопровождением целей методом равносигнальной зоны.
Известно устройство контроля системы сопровождения, содержащее силовой привод антенны, антенну, устройство имитации диаграммы направленности антенны, содержащее синусно-косинусный вращающийся трансформатор (СКВТ) и контактное кулачковое устройство, установленные на валу антенны, а также модулятор, приемник, автомат захвата и схему выделения ошибки.
В приемнике станции находится контрольный генератор, выходные импульсы которого модулируются сигналами модулятора. С выхода приемника видеосигналы поступают на входы автомата захвата и схемы выделения ошибки.
Описанное устройство обладает тем недостатком, что для контроля системы сопровождения используется приемник с контрольным генератором, антенна и модулятор, работа с которыми в лабораторных условиях сложная, дорогостоящая и требует специальных условий. Кроме того, установка контактного кулачкового устройства на валу антенны ухудшает весогабаритные характеристики антенного поста, его конструкцию, снижает надежность и достоверность контроля системы сопровождения.
Известен также имитатор, принятый в качестве прототипа и содержащий блок задания закона движения цели, блок, вырабатывающий видеосигналы, аналогично выходным сигналам приемника РЛС, состоящий из генератора импульсов управления и усилителя, имитатор диаграммы направленности антенны, состоящий из СКВТ, усилителя, фазочувствительного выпрямителя, контактного кулачкового устройства, а также имитатор привода антенны, дифференциал, сумматор, автомат захвата, реле, датчик автопоиска и блок выделения ошибки.
Имитатор работает следующим образом. При входе выходного вала дифференциала, ко входам которого подсоединены вал имитатора привода антенны и вал блока задания закона движения цели, в "зону" диаграммы направленности, ширина и положение которой определяются кулачком, замыкаются контакты контактного кулачкового устройства. Напряжение с имитатора диаграммы направленности поступает на вход устройства, формирования видеосигналов, сигналы с выхода которого через сумматор поступают на входы автомата захвата и блока выделения ошибки. Автомат захвата включает реле и сигнал с выхода блока выделения ошибки отрабатывается имитатором привода антенны до тех пор, пока он не станет равным нулю. Это соответствует равенству углов, задаваемых блоком задания закона движения цели и углов, отработанных имитатором привода антенны.
Описанный имитатор обладает следующими недостатками:
- низкой надежностью из-за наличия механического дифференциала и контактного кулачкового устройства;
- сложностью его применения для контроля систем сопровождения в условиях эксплуатации из-за значительного увеличения весогабаритных характеристик антенного поста при установке на него механического дифференциала, контактного кулачкового устройства и блока задания закона движения цели;
- неточной имитацией диаграммы направленности антенны, т.к. дифференциал и контактное кулачковое устройство имеют механические погрешности (мертвый ход, кинематические погрешности), которые отсутствуют в реальных диаграммах направленности антенн и которые существенно влияют на динамические свойства имитатора;
- при имитации приемника не учтены его динамические свойства (задержка, постоянная времени автоматической регулировки усиления и т.п.).
Целью предлагаемого изобретения является устранение указанных недостатков.
Сущность предлагаемого изобретения заключается в том, что предлагаемый имитатор, кроме усилителя, блока выделения ошибки, автомата захвата, реле, системы управления, нагрузки, датчика автопоиска, измерительного устройства, фазочувствительного выпрямителя, генераторов импульсов управления и задатчика координат цели содержит динамическую модель приемника, выход которой соединен со входом автомата захвата, а вход - с выходом усилителя, два пороговых устройства, входы которых соединены с соответствующими выходами фазочувствительного выпрямителя, две схемы совпадения, первые входы которых соединены с выходом первого порогового устройства, вторые входы - с выходом второго порогового устройства, а третьи - с соответствующими выходами генератора импульсов управления, два ключа, через которые выходы фазочувствительного выпрямителя общей точкой соединения подключены ко входу усилителя, управляющие входы которых соединены с выходами соответствующих схем совпадения, и вал измерительного устройства соединен с выходным валом системы управления, а входы и выходы измерительного устройства соединены с выходами задатчика координат цели и входами фазочувствительного выпрямителя соответственно.
В предлагаемом изобретении имитация диаграмм направленности антенны производится с помощью синусно-косинусных напряжений измерительного устройства, которые затем преобразуются в видеосигналы с учетом динамических свойств приемника.
Предлагаемое изобретение поясняется чертежами, где
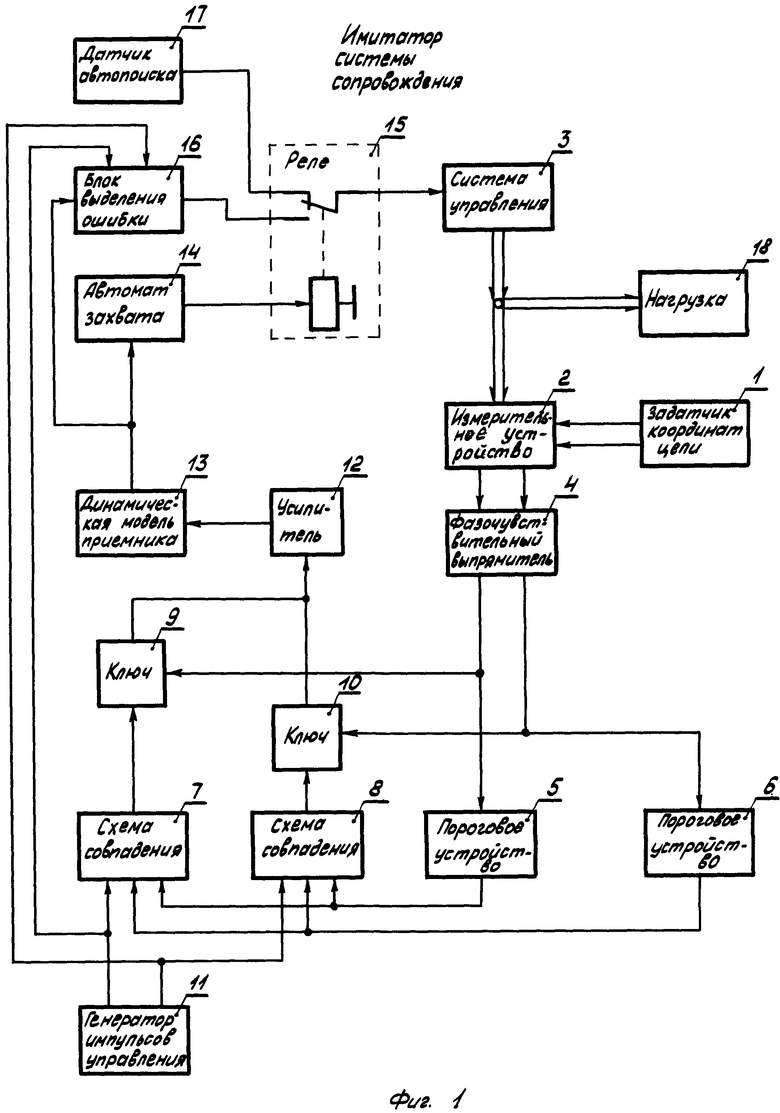
на фиг.1 изображена функциональная схема имитатора системы сопровождения;
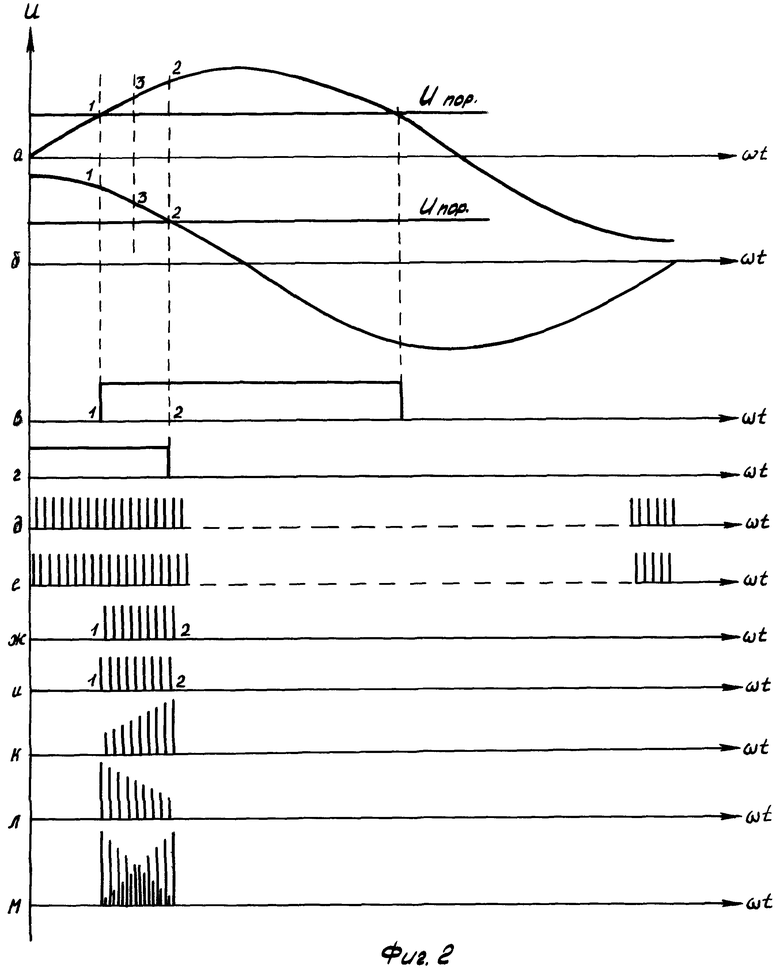
на фиг.2 - эпюры выходных напряжений устройств имитатора системы сопровождения.
Имитатор системы сопровождения содержит задатчик координат цели 1, задающий координаты цели в виде напряжений, пропорциональных синусу и косинусу углового положения цели, измерительное устройство 2 (например, СКВТ или сельсин), установленное на валу системы управления 3, выходные напряжения которого пропорциональны синусу и косинусу разности углов системы управления 3 и задатчика координат цели 1, фазочувствительный выпрямитель 4, пороговые устройства 5 и 6, величиной порога которых устанавливается ширина зоны имитируемых диаграмм направленности антенны, схемы совпадения 7 и 8, формирующие импульсы управления ключами 9 и 10 при наличии импульсов на их входах с выходов генератора импульсов управления 11 и с выходов пороговых устройств 5 и 6, усилитель 12, вход которого через ключи 9 и 10 подключается к соответствующим выходам фазочувствительного выпрямителя 4, динамическую модель приемника 13, осуществляющую имитацию динамических характеристик приемника (вводятся задержка, постоянная времени автоматической регулировки усиления, шумы и т.п.), автомат захвата 14, формирующий по выходному сигналу динамической модели приемника 13 сигнал на включение реле 15, которое своими контактами коммутирует соответствующие режимы работы системы, блок выделения ошибки 16, формирующий сигнал ошибки из выходного сигнала динамической модели приемника 13 при наличии выходных импульсов генератора импульсов управления 11, датчик автопоиска 17, формирующий сигналы автопоиска, системы управления 3, предназначенной для управления нагрузкой 18, соединенной с выходным валом системы управления 3.
Имитатор системы сопровождения предусматривает автоматическую работу системы в следующих режимах:
- поиск цели;
- захват цели;
- автосопровождение цели.
Сигнал автопоиска из датчика автопоиска 17 через нормально-замкнутые контакты реле 15 поступает на вход системы управления 3, которая вращает выходной вал по выбранному закону поиска цели. При этом вращение выходного вала системы управления 3 передается нагрузке 18 и измерительному устройству 2. В то же время на входы измерительного устройства 2 поступают напряжения от задатчика координат цели 1, пропорциональные, например, синусу и косинусу углового положения цели.
Выходные напряжения измерительного устройства 2, пропорциональные синусу и косинусу разности углов системы управления 3 и углов задатчика координат цели 1, задаваемых в виде напряжений, поступают на вход фазочувствительного выпрямителя 4, который производит выделение огибающих этих напряжений (см. фиг.2а, б). Огибающие на участке 1-2 (см. фиг.2а, б) имитируют диаграммы направленности антенны. Участок 1-2 соответствует ширине зоны, а изменение огибающих на этом участке - изменению диаграмм направленности антенны с равносигнальным направлением в точке 3. Автосопровождение цели заключается в захвате и удержании согласованного положения измерительного устройства 2 с положением, задаваемым задатчиком координат цели 1. В согласованном положении величины огибающих определяются точкой 3 (см. фиг.2а, б) с заданной точностью при всех изменениях входных напряжений задатчика координат цели 1. Это осуществляется следующим образом.
Напряжения с выходов фазочувствительного выпрямителя 4 поступают на входы пороговых устройств 5 и 6, которые срабатывают при достижении огибающими величины порога. Величины напряжений Uпор. (см. фиг.2а, б) выбираются в соответствии с требуемой шириной диаграмм направленности антенн. Выходные сигналы пороговых устройств 5 и 6 (см. фиг.2в, г) поступают на входы схем совпадения 7 и 8, куда также поступают импульсы от генератора импульсов управления 11 (см. фиг.2д, е), следующие с одинаковой частотой, но сдвинутые друг относительно друга на половину периода. На выходы схем совпадения 7 и 8 проходят импульсы от генератора импульсов управления 11 только при наличии разрешающих напряжений из выходов пороговых устройств 5 и 6, т.е. в интервале 1-2 (см. фиг.2ж, и), соответствующем ширине диаграммы направленности. Импульсы с выходов схем совпадения 7 и 8 открывают ключи 9 и 10, на сигнальные входы которых подаются напряжения с соответствующих выходов фазочувствительного выпрямителя 4. В результате на выходах ключей 9 и 10 появляются импульсы с частотой следования импульсов генератора импульсов управления и с амплитудой, соответствующей величинам выходных напряжений фазочувствительного выпрямителя 4 (см. фиг.2к, л). Эти импульсы смешиваются на входе усилителя 12, усиливаются им, ограничиваются снизу (см. фиг.2м) и поступают на вход динамической модели приемника 13.
Форма и параметры сигнала с выхода динамической модели приемника 13 соответствуют форме и параметрам реального видеосигнала на выходе приемника. Этот сигнал поступает на входы автомата захвата 14 и блока выделения ошибки 16. Автомат захвата 14 формирует сигнал на включение реле 15, которое своими нормально-разомкнутыми контактами подключает выход блока выделения ошибки 16 ко входу системы управления 3. Система управления 3 вращает нагрузку 18 и вал измерительного устройства 2 в направлении уменьшения сигнала на выходе блока выделения ошибки 16 до нуля. При этом выходной вал измерительного устройства 2 повернут на угол, равный углу, задаваемому задатчиком координат цели. При этом огибающие на выходе фазочувствительного выпрямителя 4 равные между собой и их величины определяются точкой 3 (см. фиг.2а, б) с заданной точностью.
Таким образом, происходит захват цели, а в дальнейшем по сигналу с выхода блока выделения ошибки 16 и автосопровождение "цели", закон движения которой определяет задатчик координат цели 1.
Предложенные динамическая модель приемника, пороговые устройства, схемы совпадения и ключи с соответствующим включением их вместо дифференциала и контактного кулачкового устройства позволяют:
- повысить надежность и срок службы имитатора не менее чем в три раза;
- произвести точную имитацию диаграмм направленности антенны, т.к. исключены погрешности механических устройств, и учесть динамические свойства приемника;
- упростить конструкцию имитатора, что позволяет использовать его для контроля устройств системы сопровождения в условиях эксплуатации и тем самым повысить достоверность ее контроля, а также по-прежнему использовать его для отработки системы сопровождения в лабораторных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР ДЛЯ ОБРАБОТКИ КАНАЛА ПЕЛЕНГАЦИИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1970 |
|
SU1840956A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЕЛЕНГАТОРА | 1976 |
|
SU1840944A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЧАЛЬНЫХ УСЛОВИЙ НЕЛИНЕЙНОЙ ТРАЕКТОРИИ ВОЗДУШНОЙ ЦЕЛИ | 2011 |
|
RU2483272C2 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
Изобретение относится к области радиолокации. Достигаемый технический результат - повышение точности и надежности. Указанный результат достигается за счет того, что имитатор содержит блок выделения ошибки, нормально-разомкнутые контакты реле, систему управления и нагрузку, автомат захвата, датчик автопоиска, генератор управляющих импульсов, измерительное устройство, фазочувствительный выпрямитель, усилитель, задатчик координат цели, содержит также динамическую модель приемника, два пороговых устройства, два элемента И и два ключа, определенным образом соединенные между собой. 2 ил.
Имитатор системы сопровождения, содержащий последовательно соединенные блок выделения ошибки, нормально-разомкнутые контакты реле, системы управления и нагрузку, автомат захвата, выход которого соединен с обмоткой реле, а вход - со входом блока выделения ошибки, датчик автопоиска, выход которого через нормально-замкнутые контакты реле соединен со входом системы управления, генератор управляющих импульсов, два выхода которого соединены со вторыми и третьим входами блока выделения ошибки, измерительное устройство, фазочувствительный выпрямитель, усилитель и задатчик координат цели, отличающийся тем, что, с целью повышения точности и надежности, в него дополнительно введены динамическая модель приемника, выход которой соединен со входом автомата захвата, а вход - с выходам усилителя, два пороговых элемента, входы которых соединены с соответствующими выходами фазочувствительного выпрямителя, два элемента И, первые входы которых соединены с выходами первого порогового элемента, вторые входы - с выходами второго порогового элемента, а третьи входы - с соответствующими выходами генератора управляющих импульсов, и два ключа, через которые выходы фазочувствительного выпрямителя своей общей точкой подключены к входу усилителя, управляющие входы которого соединены с выходами соответствующих элементов И, причем вал измерительного устройства соединен с выходным валом системы управления, а входы и выходы измерительного устройства соединены с выходами задатчика координат цели и входами фазочувствительного выпрямителя соответственно.

