Предлагаемое изобретение относится к области радиолокационной техники и может быть использовано при проектировании радиолокационных станций (РЛС) с автоматическим сопровождением целей по пеленгу методом равносигнальной зоны, а также в системах контроля каналов пеленгации РЛС.
В настоящее время известен имитатор, состоящий из имитатора привода антенны, имитатора диаграммы направленности антенны; устройства, задающего закон движения цели, устройства, вырабатывающего видеосигналы, и дифференциала, который дает возможность исследовать и отработать канал пеленгации в лаборатории в условиях, идентичных реальным, без применения радиотехнических устройств.
На выходе известного имитатора формируются видеоимпульсы, идентичные выходным видеоимпульсам приемника РЛС и изменяющиеся таким же образом, как и при сопровождении цели.
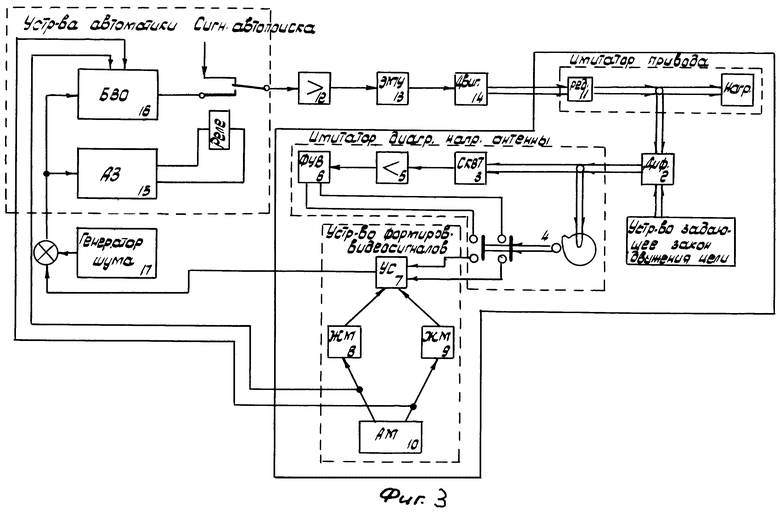
Суммируя с выходными сигналами имитатора шумы, подаваемые от генератора шумов (см. фиг. 3, 17), можно проверить работу канала и исследовать их влияние на вероятность захвата и точность сопровождения цели.
Однако, так как средства борьбы с помехами обычно находятся в приемнике, при использовании известного имитатора имеется возможность воспроизвести только собственные шумы приемника, и помехи, возникающие при передаче сигнала от приемника к устройствам автоматики. А в настоящее время современные РЛС работают в условиях применения противником различного вида помех. Кроме этого, радиолокационный сигнал корабельных РЛС распространяется над морской поверхностью, состояние которой существенным образом влияет на условия прохождения радиоволн. Происходят флюктуации сигнала, замирания его, многократные переотражения и другие явления, коренным образом влияющие на вероятность захвата и точность сопровождения.
В настоящее время имеются экспериментальные данные по искажению радиолокационных сигналов при прохождении их над морской поверхностью и известны практически все виды помех, применяемых для нарушения работы РЛС, поэтому возникла необходимость производить исследование влияния различного рода вредных факторов на вероятность захвата и точность сопровождения целей, что невозможно сделать, применяя известный имитатор.
Предлагаемое изобретение преследует цель устранить этот недостаток.
Сущность его заключается в том, что предлагаемый имитатор, кроме имитатора привода антенны, имитатора диаграммы направленности антенны, устройства, задающего закон движения цели, устройства, вырабатывающего видеосигналы, и дифференциала, содержит полупроводниковый коммутатор, логарифмический усилитель, генератор СВЧ сигналов (ГСС) и смеситель, причем, выход устройства формирования видеосигналов электрически соединен с входом логарифмического усилителя, который управляет работой полупроводникового коммутатора, а СВЧ-сигналы от ГСС поступают через смеситель и полупроводниковый коммутатор на вход приемника. Благодаря такому включению, СВЧ-сигналы от ГСС модулируются выходными импульсами известного имитатора. При этом получается аналогия входным сигналам приемника, поступающим от парциальных лепестков диаграммы направленности антенны при сопровождении цели.
Ввод в СВЧ-тракт смесителя дает возможность сымитировать практически любые виды помех и флюктуации, воздействующих на станцию.
Применение предлагаемого устройства при разработке РЛС дает возможность произвести исследование работы приемного канала и канала пеленгации при воздействии на станцию помех различного вида и природы в лабораторных условиях без выхода в эфир. Благодаря этому сокращается время исследования и отработки комплекса изделия в период стендовых и полигонных испытаний, что значительно ускоряет и удешевляет разработку изделий.
Предлагаемое изобретение будет понятно из нижеприведенного описания.
Перечень фигур на чертежах
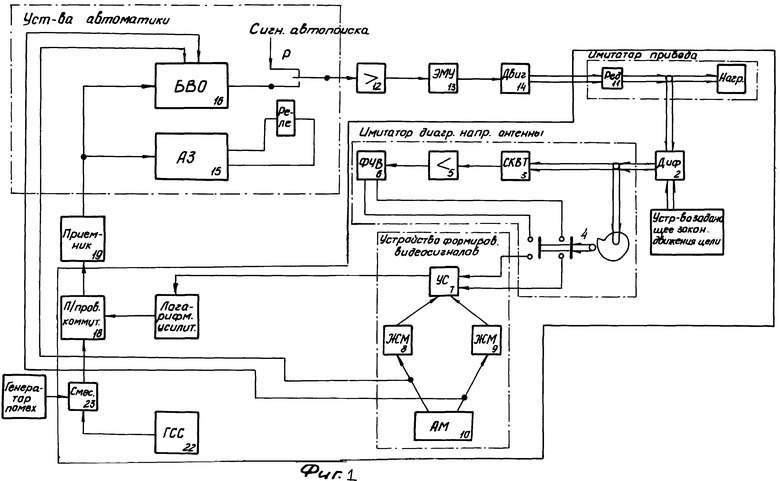
Фиг. 1 - Функциональная схема исследования приемного канала и канала пеленгации в лабораторных условиях при помощи предлагаемого имитатора РЛС.
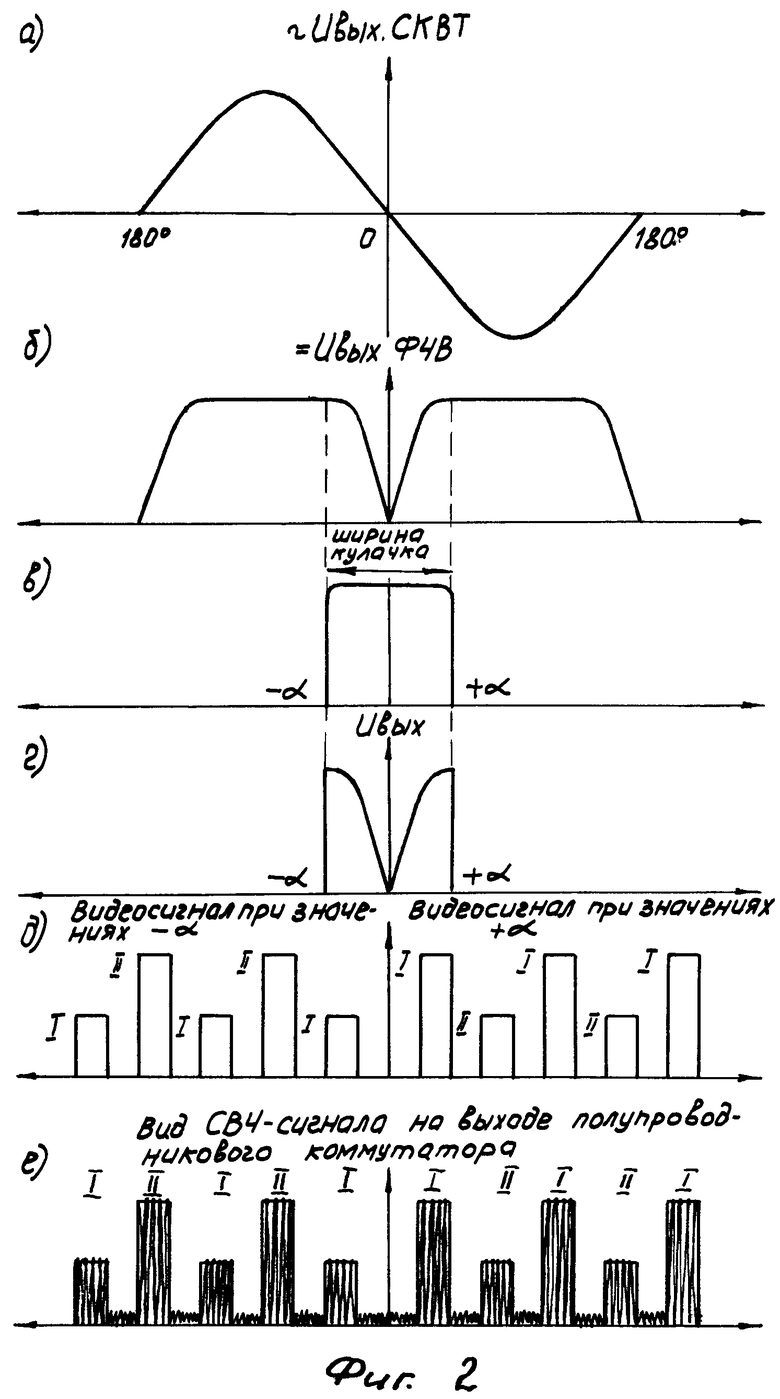
Фиг. 2 - Эпюры напряжений устройств имитатора РЛС
Фиг. 3 - Функциональная схема отладки и исследования канала пеленгации при помощи известного имитатора.
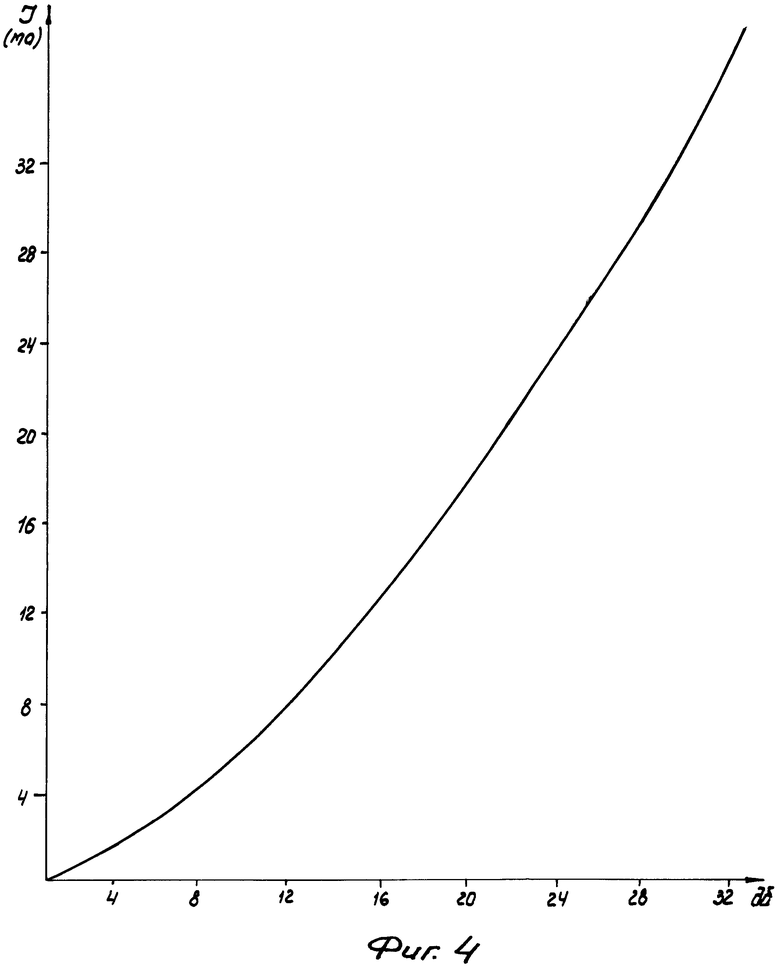
Фиг. 4 - Зависимость затухания СВЧ-сигнала в полупроводниковом коммутаторе от тока управления.
Обозначения
1 - устройство, задающее закон движения;
2 - дифференциал;
3 - вращающийся трансформатор (СКВТ);
4 - кулачковое контактное устройство;
5 - усилитель;
6 - фазочувствительный выпрямитель (ФЧВ);
7 - усилитель-смеситель (УС);
8-9 - ждущий мультивибратор;
10 - автоколебательный мультивибратор (АМ);
11 - редуктор;
12 - усилитель силового привода;
13 - электромашинный усилитель;
14 - двигатель;
15 - автомат захвата (АЗ);
16 - блок выделения ошибки (БВО);
17 - генератор шума (ГШ);
18 - полупроводниковый коммутатор;
19 - приемник;
20 - логарифмический усилитель;
21 - генератор помех (ГП);
22 - генератор СВЧ-сигналов (ГСС);
23 - смеситель.
Детальное описание
Предлагаемый имитатор для отработки канала пеленгации РЛС состоит из следующих узлов (см. фиг. 1):
I - устройства, задающего закон движения цели (1),
II - дифференциала (2),
III - устройства имитации диаграммы направленности антенны (3-6),
IV - устройства формирования видеосигналов (7-10),
V - имитатора привода антенны (11),
VI - логарифмического усилителя,
VII - полупроводникового коммутатора.
I. В качестве устройства, задающего закон движения цели (1), применен механический осциллятор, преобразующий вращательное движение в движение по гармоническому закону посредством карданного кольца; выходной вал его через дифференциал (2) поворачивает вал вращающегося трансформатора (3) и вал кулачкового устройства (4).
II. В имитаторе применен механический дифференциал обычного типа, содержащий конические зубчатые колеса, изготовленные по высокому классу точности. Дифференциал имеет два входных вала и один выходной (суммирующий).
III. Устройство имитации диаграммы направленности антенны (3-6) включает в себя усилитель с регулируемым коэффициентом усиления (5), изменяя который, имитируем различную крутизну диаграммы направленности антенны; фазочувствительный выпрямитель (ФЧВ, 6) с встречно-включенными обмотками трансформатора для получения на двух выходах ФЧВ напряжений одного знака; вращающийся трансформатор (СКВТ, 3) и кулачковое контактное устройство с регулируемой шириной кулачка (4).
Устройство имитации диаграммы направленности антенны преобразует синусоидальное напряжение с СКВТ (3) (см. фиг. 2а) в положительные напряжения (см. фиг. 2б), причем при повороте вала СКВТ в одну сторону (+α) от электрического нуля СКВТ, это напряжение существует на одном выходе, а при повороте в другую сторону (-α) - на другом выходе (см. фиг. 2б). Таким образом, эти выходные напряжения пропорциональны углу поворота вала СКВТ (3) от электрического нуля. Эти преобразования производит усилитель (5) и ФЧВ (6).
Выходные напряжения ФЧВ проходят через нормально открытые контакты кулачкового устройства (4) при их замыкании. От ширины кулачка (см. фиг. 2в) зависит сектор замкнутого состояния контактов, т.е. существование напряжения на выходах устройства (см. фиг. 2г).
Таким образом, имитируется ширина диаграммы направленности антенны, которую можно изменить в процессе исследований, так как конструкция кулачка выполнена разрезной.
Электрический нуль СКВТ совмещен с серединой кулачка.
Выходная характеристика устройства имеет вид, показанный на фиг. 2г.
IV. Устройство формирования видеосигналов (7-10) преобразует постоянные напряжения с выхода устройства имитации диаграммы направленности антенны в видеосигналы с периодом и частотой сканирования (или, что то же самое, с частотой и периодом выходных видеосигналов приемника).
Устройство состоит из следующих элементов (см. фиг. 1): автоколебательного мультивибратора (АМ, 10), двух ждущих мультивибраторов (ЖМ, 8-9) и усилителя-смесителя (У-С, 7). АМ (10) генерирует сигналы с частотой следования, равной частоте сканирования. С противоположных плеч АМ продифференцированные импульсы запускают ЖМ (8 и 9), длительность импульсов которых равна длительности видеоимпульсов, приемника.
Выходы ЖМ (8 и 9) поступают на У-С (7), где смешиваются на общей нагрузке и их амплитуда изменяется в зависимости от напряжения с выхода устройства имитации диаграммы направленности антенны.
Таким образом, амплитуды смежных импульсов зависят от отклонения вала СКВТ (3) (см. фиг. 1) от нулевого положения (см. фиг. 2д).
V. Имитатор привода антенны представляет собой универсальный редуктор (11) зубчатых колес для исследования следящих систем, в котором предусмотрена возможность пристыковки любого типа двигателя и установки любого передаточного числа в диапазоне от 100 до 5000.
Двигатель через установленную редукцию вращает датчики следящей системы типа СКВТ и нагрузку, имитирующую антенну станции.
VI. Логарифмический усилитель преобразует импульсы с выхода устройства формирования видеосигналов в токовые импульсы той же формы, необходимые для управления полупроводниковым коммутатором. Причем, так как характеристика полупроводникового коммутатора в логарифмическом масштабе имеет вид, показанный на фиг. 4, то применение логарифмического усилителя позволяет получить линейную характеристику зависимости затухания СВЧ-сигнала в полупроводниковом коммутаторе от тока управления.
VII. Полупроводниковый коммутатор представляет из себя управляемый аттенюатор с p-i-n-диодами, который имеет характеристику, представленную на фиг. 4, (согласно материалам, изложенным в статье Орлова О.С. "Анализ широкополосных управляемых аттенюаторов с p-i-n-диодами". Вопросы радиоэлектроники, серия VI, №5, 1965 г.).
Рассмотрим работу канала пеленгации при использовании предлагаемого имитатора Pпс (см. фиг. 1).
Имитатор предусматривает работу канала в следующих режимах:
1 поиск цели;
2 "захват" цели;
3 сопровождение цели.
Сигнал автопоиска (см. фиг. 1) через нормально замкнутые контакты реле автомата захвата (15) поступает на вход силового следящего привода, который вращает выходной вал по выбранному закону поиска цели. При этом вращение выходного вала редуктора (11) передается валу СКВТ (3) и валу кулачкового устройства (4) через дифференциал (2). В то же время вал СКВТ (3) и кулачок от устройства, задающего закон движения цели (1), через второй вал дифференциала (2) поворачивается по закону движения цели. Таким образом, вал СКВТ (3) и кулачок вращаются по суммарному закону движения цели и антенны при поиске цели, т.к. дифференциал производит сложение этих двух движений. Когда при движении кулачковое устройство (4) замкнет контакты, напряжение с выхода устройства имитации диаграммы направленности антенны (3-6) поступят в устройство формирования видеосигналов (7-10). Это равносильно тому моменту, когда в антенну РЛС начнут приходить отраженные от цели сигналы при поиске.
Выходные импульсы из устройства формирования видеосигналов (7-10) поступят на логарифмический усилитель (20), с выхода которого импульсы управления полупроводниковым коммутатором (18) поступают на его управляющий вход.
НА СВЧ-вход полупроводникового коммутатора (18) от СВЧ генератора (22) поступают сигналы с параметрами исследуемой станции. Промодулированные управляющими сигналами СВЧ-сигналы с выхода полупроводникового коммутатора поступают в приемник канала пеленгации. С выхода приемника видеосигналы, как и в реальной системе, поступают в устройства автоматики и следящего провода. Срабатывает автомат захвата (15), его реле отключит сигнал поиска от силового следящего привода и подключит выходной сигнал блока выделения ошибки (16). Произойдет "захват" цели, и канал перейдет в режим сопровождения цели.
Устройство, задающее закон движения цели (1), через дифференциал (2) будет поворачивать валы СКВТ (3) и кулачок, а силовой следящий привод через второй вал дифференциала будет отрабатывать заданный закон, поворачивая валы СКВТ (3) и кулачок в согласованное положение.
При исследованиях от генератора помех (21) через смеситель (23) на вход полупроводникового коммутатора подаются сигналы помех любого вида и с любыми параметрами, и исследуется их влияние на точность сопровождения и вероятность "захвата" цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР СИСТЕМЫ СОПРОВОЖДЕНИЯ | 1978 |
|
SU1840907A1 |
| ЗЕНИТНАЯ РАКЕТНО-ПУШЕЧНАЯ БОЕВАЯ МАШИНА | 1999 |
|
RU2156943C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| УСТРОЙСТВО ВВОДА СВЧ СИГНАЛОВ ИМИТАТОРА ЦЕЛИ И ПОМЕХ В СОСТАВЕ БРЛС С КОМПЕНСАЦИОННЫМ КАНАЛОМ ПОМЕХОЗАЩИТЫ | 2000 |
|
RU2207587C2 |
| СИСТЕМА ВСТРОЕННОГО КОНТРОЛЯ И КАЛИБРОВКИ МОНОИМПУЛЬСНОЙ РЛС | 2011 |
|
RU2459219C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2255353C2 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| Многоканальное автоматизированное устройство для противодействия радиолокационной разведке | 2021 |
|
RU2777376C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
Изобретение относится к области радиолокационной техники и может применяться при проектировании РЛС с автоматическим сопровождением целей по пеленгу. Имитатор содержит имитатор привода антенны, имитатор диаграммы направленности антенны, устройство, задающее движение цели, устройство, вырабатывающее видеосигналы и дифференциал. Дополнительно в конструкцию введены логарифмический усилитель, полупроводниковый коммутатор и смеситель. Технический результат - обеспечение возможности проверить воздействие средств РПД и прочих вредных факторов на качество сопровождения цели. 4 ил.
Имитатор для отработки канала пеленгации радиолокационных станций, содержащий имитатор привода антенны, имитатор диаграммы направленности антенны, блок отработки закона движения цели и блоки выработки видеосигналов и дифференциала, отличающийся тем, что, с целью обеспечения возможности исследования влияния различных помех, в него введены коммутатор, логарифмический усилитель, вход которого подключен к выходу блока выработки видеосигналов, а выход соединен с управляющим входом коммутатора, и подключенные через коммутатор ко входу приемника радиолокационной станции генератор сверхвысокочастотных сигналов со смесителем.

