Изобретение относится к области радиолокации и может быть применено при проверке и настройке систем пеленгации, использующих метод сравнения (равносигнальный метод) для автоматического сопровождения источника радиоизлучения.
Известны устройства контроля систем пеленгации, применяемые для контроля, проверки и настройки пеленгационных систем.
Система пеленгации с контролем состоит из формирователя высокочастотного ВЧ-сигнала, включающего контрольный генератор, коаксиально-волноводный тракт и контрольную антенну, и пеленгационной системы, в которую входят пеленгационная антенна с разнесенными облучателями, которые через антенный коммутатор соединены с приемником. Выход приемника соединен с первым входом блока выделения ошибки и автоматом захвата, выход которого подключен ко второму входу блока выделения ошибки, который через усилитель отработки и усилитель мощности подсоединен к устройству вращения антенны, находящегося на одном валу с пеленгационной антенной. На входы антенного коммутатора и блока выделения ошибки поступают управляющие сигналы (стробы) от устройства формирования управляющих сигналов. Контроль и проверка системы пеленгации осуществляется следующим образом. Сигнал контрольного генератора через коаксиально-волноводный тракт, контрольную антенну через канал связи поступает на пеленгационную антенну.
Через антенный коммутатор сигналы от каждого из облучателей пеленгационной антенны поступают на приемник. Сигнал приемника при определенном уровне мощности контрольного высокочастотного сигнала обеспечивает срабатывание автомата захвата, который управляет подключением блока выделения ошибки. В блоке выделения ошибки по управляющим сигналам (стробом) идентичным стробам, поступающим на антенный коммутатор, происходит разделение сигнала приемника на две составляющие, соответствующие сигналам, принятым левым и правым облучателями пеленгационной антенны. По этим сигналам находится разностный сигнал, который является сигналом ошибки (рассогласования) системы пеленгации, использующей метод сравнения (равносигнальный) для автоматического сопровождения цели (источника радиоизлучения).
Разностный сигнал изменяет свою величину и знак (фазу) в зависимости от взаимного положения пеленгационной и контрольной антенн.
Разностный сигнал (сигнал рассогласования) после усиления усилителем отработки и усилителем мощности поступает на устройство вращения антенны, которое изменяет угловое положение пеленгационной антенны до тех пор, пока разностный сигнал, принятый двумя облучателями пеленгационной антенны, не станет равным минимуму (нулю).
Данное устройство контроля системы пеленгации не всегда возможно применить при проверке, настройке и контроле пеленгационных систем РЛС. Это вызвано тем, что:
- контроль точности отработки системы пеленгации требует установки контрольной антенны, отнесенной на расстояние до L=20÷30 м от пеленгационной антенны (расстояние зависит от длины волны высокочастотного сигнала), что не всегда возможно при ограниченных размерах носителей РЛС (например, на летательных, надводных и подводных носителях);
- данный метод контроля не обеспечивает скрытности работы РЛС при проведении контрольных, регулировочных проверок системы пеленгации РЛС. Целью данного изобретения является повышение точности контроля системы пеленгации и помехозащищенности (скрытности) работы РЛС при проведении контрольных и регулировочных проверок системы пеленгации РЛС.
Поставленная цель достигается тем, что в систему пеленгации с контролем, состоящую из автомата захвата, соединенного с блоком выделения ошибки, который через усилитель отработки и усилитель мощности подсоединен к устройству вращения антенны находящегося на одном валу с пеленгационной антенной, устройства начала контроля, выход которого подключен к устройству вращения антенны, и устройства формирования управляющих сигналов, дополнительно введены датчик углового положения антенны (синусно-косинусный вращающийся трансформатор), размещаемый на одном валу с пеленгационной антенной, синусная обмотка которого соединена с входами автомата захвата, блока выделения ошибки и двух фазочувствительных детекторов, выходы которых через схемы "И" подключены к управляющим входам блока выделения ошибки, причем вторые входы схем "И" соединены с соответствующими выходами устройства формирования управляющих сигналов, а устройство вращения антенны соединено с устройством начала контроля.
Введение перечисленных устройств вместо устройств, применяемых при контроле в прототипе, повышает точность контроля, которая достигается за счет того, что при контроле производится измерение только ошибки отработки системы пеленгации и полностью исключается методическая ошибка контроля в случае установки контрольной антенны на расстояние, меньше чем L≈80÷100λ, где λ - длина волны, от пеленгационной антенны.
Исключение из пеленгационной системы формирователя контрольного высокочастотного сигнала повышает помехозащищенность (скрытность работы) РЛС.
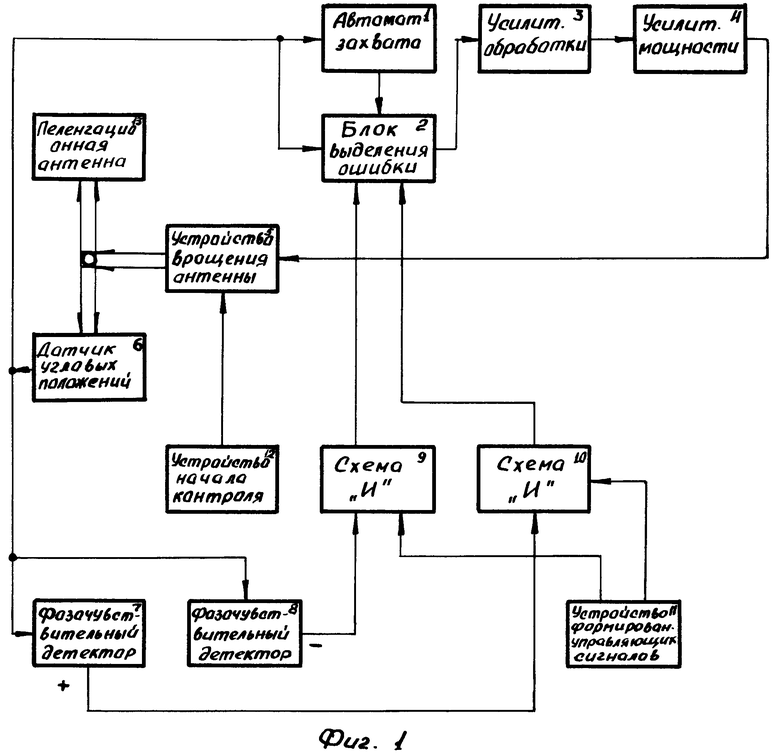
На фиг.1 приведена блок-схема системы пеленгации с контролем. Система пеленгации с контролем состоит из автомата захвата 1, блока выделения ошибки 2, усилителя отработки 3, усилителя мощности 4, устройства вращения антенны 5, датчика углового положения антенны 6, фазочувствительных детекторов 7, 8, схем "И" 9, 10, устройства формирования управляющих сигналов 11 и устройства начала контроля 12, пеленгационной антенны 13.
Автомат захвата 1 соединен с блоком выделения ошибки 2, который через усилитель отработки 3 и усилитель мощности 4 подсоединен к устройству вращения антенны 5, находящемуся на одном валу с пеленгационной антенной 13.
Синусная обмотка датчика углового положения 6, размещенного на одном валу с пеленгационной антенной 13 соединена с входами автомата захвата 1 блока выделения ошибки 2 и двух фазочувствительных детекторов 7 и 8, выходы которых через схемы "И" 9, 10 подключены к управляющим входам блока выделения ошибки 2. Вторые входы схем "И" соединены с соответствующими выходами устройства формирования управляющих сигналов 11, а устройство начала контроля 12 соединено с устройством вращения антенны 5.
Автомат захвата - пороговое устройство, срабатывающее при определенной величине входного сигнала.
Устройство начало контроля - устройство, формирующее команду начало контроля, обеспечивающее начало вращения антенны.
Блок выделения ошибки - устройство, вырабатывающее напряжение сигнала ошибки, которое служит для управления пеленгационной антенной в автосопровождении цели.
Устройством начала контроля 12 выдается управляющий сигнал на устройство вращения антенны 5, которое изменяет угловое положение пеленгационной антенны 13 относительно первоначального и датчика углового положения антенны 6. В этом случае с синусной обмотки датчика углового положения (синусно-косинусного вращающегося трансформатора) 6 снимается сигнал, который поступает на автомат захвата 1 и блока выделения ошибки 2. Сигнал на синусной обмотке синусно-косинусного вращающегося трансформатора 6, описываемый выражением
y=U0 Sinθ,
где U0 - действующее значение напряжения;
θ - угол поворота вала датчика,
совпадает с пеленгационной характеристикой антенны при использовании метода сравнения (равносигнального метода) для пеленгования источника излучения. Так как сигнал, поступающий на вход автомата захвата и блока выделения ошибки, снимается с одной обмотки синусно-косинусного трансформатора, то для выработки сигнала ошибки (разностного сигнала) системы пеленгации его необходимо разделить на две составляющие, отличающиеся по амплитуде и знаку. Это возможно, например, в случае если закрывать одно плечо блока выделения ошибки на время, когда угол поворота вала датчика равен 0≤θ1≤π, а другое плечо - когда угол поворота вала датчика равен π≤θ2≤2π, тогда разностный сигнал блока выделения ошибки будет совпадать с входным сигналом блока выделения ошибки и сигналом y=U0Sinθ.
Когда сигнал y=U0Sinθ достигает определенного уровня (при заданном текущем угле поворота θi), срабатывает автомат захвата 1, который разрешает прохождение этого сигнала на вход блока выделения ошибки 2. Одновременно сигнал с выхода синусной обмотки датчика углового положения 6 поступает на входы двух фазочувствительных детекторов 7, 8 которые вырабатывают признак фазы угла поворота датчика 6 относительно опорного напряжения. Если фаза выходного сигнала датчика 6 будет положительной "+" относительно опорного сигнала, то срабатывает фазочувствительный детектор 7, который вырабатывает признак "+", если фаза выходного сигнала датчика 6 будет отрицательной "-" относительно опорного сигнала, то срабатывает фазочувствительный детектор 8, который вырабатывает признак "-".
В момент времени, когда фаза выходного сигнала датчика 6 будет положительной "+" один строб с устройства формирования управляющих сигналов 11 через схему И 10 проходит на блок выделения ошибки 2, а другой строб не проходит через схему И 9, на другой вход которой поступает признак "+" с фазочувствительного детектора 7.
На выходе блока выделении ошибки 2 в этом случае вырабатывается разностный сигнал, который усиливается усилителем 3, усилителем мощности 4 и поступает на устройство вращения антенны 5, которое вращает вал пеленгационной антенны 13 и датчика 6 до тех пор, пока разностный сигнал станет равным нулю. Если фаза выходного сигнала датчика 6 станет отрицательной строб с устройства 11 не будет проходить через схему И 10 на блок выделения ошибки 2, так как на второй вход схемы И 10 поступает признак "-" с фазочувствительного детектора 8, и будет проходить строб с устройства 11 через схему И 9 на другой вход блока выделения ошибки. В этом случае вырабатывается разностный сигнал другого знака (по сравнению с случаем, рассмотренным выше), который поступает через усилители 3, 4 на устройство вращения антенны 5 и вращает пеленгационную антенну 13 и датчик 6 в противоположную сторону.
Проверка пеленгационной системы оканчивается при установке датчика угловых положений 6 и пеленгационной антенны 13 в нулевое положение.
Предложенная система пеленгации с контролем повышает точность измерения углового направления при помощи системы пеленгации, так как проверяется работоспособность отдельных устройств системы пеленгации (блока выделения ошибки, усилителя отработки, усилителя мощности, устройства вращения пеленгационной антенны, блока формирования управляющих сигналов) и обеспечивает измерение статической и динамической ошибок отработки. Динамическая ошибка измеряется по величине рассогласования на входе усилителя отработки, статистическая ошибка - измеряется, например, по уровню напряжения на синусной обмотке датчика угловых положений (синусно-косинусного вращающегося трансформатора), в момент установки пеленгационной антенны в нулевое положение. Если статическая и динамическая ошибки не превышают заранее заданных величин, то система пеленгования обеспечивает измерение углового направления на источник излучения в рабочем режиме с заданной точностью, т.е. обеспечиваются точности измерения углового направления при помощи системы пеленгации без контрольного сигнала высокой частоты, который излучается через контрольную антенну.
Так как при этих проверках не производится излучение высокочастотного сигнала через контрольную антенну, то это приводит к значительному повышению помехозащищенности (скрытности работы) РЛС при проведении контрольных, регламентных проверок и различных работ по настройке системы пеленгации. В настоящее время в связи с разработкой разведывательных приемников с высокой чувствительностью предъявляются очень жесткие требования в части скрытности работы РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| ИМИТАТОР СИСТЕМЫ СОПРОВОЖДЕНИЯ | 1978 |
|
SU1840907A1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| ИМИТАТОР ДЛЯ ОБРАБОТКИ КАНАЛА ПЕЛЕНГАЦИИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1970 |
|
SU1840956A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2006 |
|
RU2316788C9 |
Изобретение относится к области радиолокационной техники. Достигаемый технический результат - повышение точности контроля и его помехозащищенности. Указанный результат достигается за счет того, что устройство содержит антенну, блок формирования сигнала начала контроля, блок формирования управляющих сигналов, автомат захвата, блок выделения сигнала ошибки, усилитель, блок вращения антенны с приводом антенны, синусно-косинусный вращающийся трансформатор, два фазочувствительных детектора и схема И, определенным образом выполненные и соединенные между собой. 1 ил.
Устройство для контроля пеленгатора, содержащее антенну, блок формирования сигнала начала контроля, блок формирования управляющих сигналов и последовательно соединенные автомат захвата, блок выделения сигнала ошибки, усилитель и блок вращения антенны, при этом вход автомата захвата соединен со вторым входом блока выделения сигнала ошибки, а выход блока вращения антенны соединен с приводом антенны, отличающееся тем, что, с целью повышения точности контроля и его помехозащищенности, введены синусно-косинусный вращающийся трансформатор и последовательно соединенные первые фазочувствительный детектор и схема "И" и вторые фазочувствительный детектор и схема "И", при этом первый и второй выходы блока формирования управляющих сигналов соединены со вторыми входами соответственно первой и второй схем "И", выходы которых соединены соответственно с третьим и четвертым входами блока выделения сигнала ошибки, вход которого соединен с синусной обмоткой синусно-косинусного трансформатора и входами фазочувствительных детекторов, выход блока формирования сигнала начала контроля соединен со вторым входом блока вращения антенны, а синусно-косинусный вращающийся трансформатор размещен на одном валу с антенной.

