Изобретение относится к области радиолокации. Оно может быть использовано в моноимпульсных обзорных РЛС, в которых необходимо достижение высокой точности измерения угловых координат целей в условиях активного радиопротиводействия.
Известен многоканальный амплитудно-амплитудный приемник моноимпульсной РЛС (/1/ стр. 74), содержащий угловой датчик и усилительные каналы, включающие в себя преобразователи частоты, линейные УПЧ с оптимальными фильтрами, подключенные к входам углового дискриминатора.
Высокая точность пеленгации в данном приемнике обеспечивается линейностью и идентичностью усилительных каналов. Вместе с тем он не защищен от активных импульсных помех, при действии которых резко снижается точность измерения угловых координат либо исчезает возможность пеленгации.
Известно также устройство защиты приемников РЛС от импульсных помех (/2/ стр. 382), содержащее широкополосный усилитель, амплитудный ограничитель и оптимальный фильтр (схемы ШОУ и ШОС). Существенным недостатком такого устройства, как средства защиты амплитудных моноимпульсных приемников, является то, что, вследствие раздельной независимой защиты каждого из усилительных каналов, разрушаются амплитудные соотношения сигналов от целей, содержащие угловую информацию.
Известно также устройство обработки сигналов моноимпульсной РЛС, объединяющее моноимпульсные каналы с помощью частотного уплотнения и жесткого ограничения /3/, содержащее преобразователи частоты, сумматор, УПЧ, ограничитель, полосовые фильтры и детекторы.
Указанное устройство, имея в своем составе жесткий ограничитель, обеспечивает нормировку пеленгационных сигналов и защиту от импульсных помех. Его недостатком являются потери в соотношении сигнал/шум, возникающие за счет подавления сигнала выбросами шума в ограничителе и достигающие 5 дБ /3/.
Из известных устройств наиболее близким к заявляемому является многоканальный приемник моноимпульсной РЛС, содержащий угловой датчик (антенную систему) с N выходами, N усилительных каналов, включающих в себя амплитудные детекторы, линии задержки, управляемые аттенюаторы, ограничители, линейные УПЧ и оптимальные фильтры, угловой дискриминатор, устройство выделения максимума и вычислитель обратной величины.
Известное устройство обеспечивает нормирование сигналов, шумов и подавление импульсных помех при сохранении идентичности коэффициентов передачи каналов, т.е. высокой точности пеленгации.
Однако точность пеленгации в известном приемнике обеспечивается только в ограниченном динамическом диапазоне сигналов и шумов. Это связано с трудностью практической реализации элементов в усилительных каналах, стабильно сохраняющих в условиях эксплуатации точность и идентичность.
Так, пределы регулирования затухания в управляемых аттенюаторах, диапазон работы амплитудных детекторов, устройства выделения максимума, вычислителя обратной величины - такие же, какой динамический диапазон сигналов и шумов (40-60 дБ). Точность и идентичность характеристик элементов при этом не должна быть хуже, чем единицы процентов. Это требование реально выполняется только в диапазоне до 30-35 дБ. В результате при расширении динамического диапазона сигналов до 50-60 дБ погрешность пеленгации ухудшается (на краях диапазона) в 3-10 раз.
Таким образом, недостатком известного устройства является снижение точности пеленгации при расширении динамического диапазона сигналов.
Целью предлагаемого изобретения является увеличение точности пеленгации.
Поставленная цель достигается тем, что в многоканальный приемник моноимпульсной РЛС, содержащий угловой датчик с N выходами, N усилительных каналов, каждый из которых состоит из амплитудного детектора и соединенных последовательно ограничителя, линии задержки, управляемого аттенюатора, усилителя, оптимального фильтра и подключен к угловому дискриминатору, введены вычислитель минимума, гетеродинный преобразователь частоты и в каждом из N усилительных каналов сумматор, второй ограничитель, синхронный детектор, полосовой фильтр, соединенные последовательно, вторая линия задержки и вычислитель отношения, причем вход преобразователя частоты соединен с одним из выходов углового датчика, а выход - с выходами сумматоров, вторые выходы которых соединены с выходами углового датчика, опорный вход синхронного детектора соединен с выходом первого ограничителя, вход амплитудного детектора соединен с выходом полосового фильтра, а выход подключен к входам второй линии задержки, входы вычислителя отношения подключены к выходам вычислителя минимума и второй линии задержки, а выход - ко входу управляемого аттенюатора.
Введенный гетеродинный преобразователь частоты и сумматоры обеспечивают частотное уплотнение сигналов углового датчика.
Введением вторых ограничителей достигается нормировка пеленгационных сигналов, а синхронных детекторов и полосовых фильтров - выделение нормированных сигналов. Введенный вычислитель минимума обеспечивает выбор единой величины усиления в каналах при произвольном отношении уровней входных сигналов. Вычислители отношений служат для определения уровней выходных напряжений усилительных каналов, пропорциональных величинам нормированных входных сигналов. Вторая линия задержки обеспечивает неискаженную передачу формы напряжений в вычислителе отношений. В своей совокупности введением указанных блоков и связей достигается разделение операций защиты от импульсных помех (ШОУ) и управления амплитудами пеленгационных сигналов; обеспечение условий этого управления в сжатом динамическом диапазоне сигналов (после нормировки) и, таким образам, повышение точности пеленгации при расширении динамического диапазона сигналов и помех.
Автору не известны технические решения, имеющие признаки, совпадающие с совокупностью отличительных признаков предложенного технического решения.
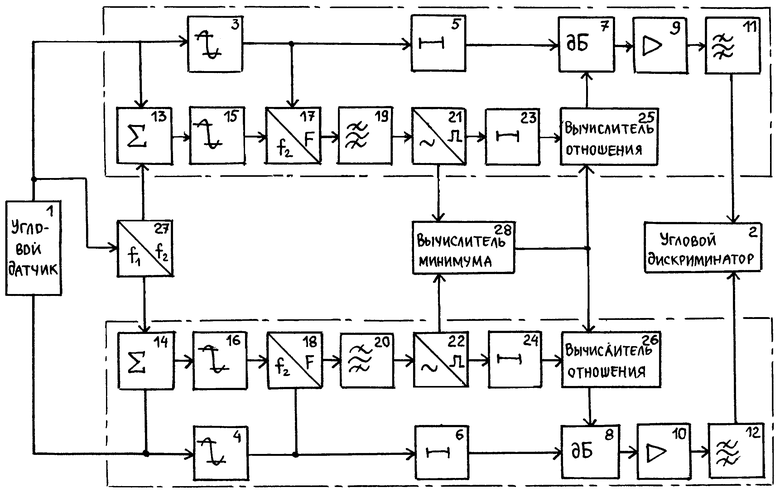
На чертеже представлена функциональная схема предлагаемого моноимпульсного приемника для числа усилительных каналов N=2.
Предлагаемый приемник содержит угловой датчик 1, угловой дискриминатор 2 и усилительные каналы, включающие в себя ограничители 3, 4, линии задержки 5, 6, регулируемые аттенюаторы 7, 8, усилители 9, 10, оптимальные фильтры 11, 12, сумматоры 13, 14, вторые ограничители 15, 16, синхронные детекторы 17, 18, полосовые фильтры 19, 20, амплитудные детекторы 21, 22, вторые линии задержки 23, 24 и вычислители отношений 25, 26. К одному из выходов (опорному) углового датчика подключен вход гетеродинного преобразователя частоты 27, выход которого соединен с входами сумматоров 13, 14. К выходам амплитудных детекторов 21, 22 подключен вычислитель минимума 28, выход которого соединен со входами вычислителей отношения 25, 26.
Терминологически и по практической реализации применяемые в предлагаемом приемнике блоки общеизвестны.
Угловым датчиком 1 служит антенна РЛС /1/, стр. 11, 14. Возможное выполнение углового дискриминатора 2 описано в /1/, стр. 12. Ограничители 3, 4, 15, 16 могут быть выполнены на биполярных транзисторах с эмиттерными связями (три-пять каскадов) /4/, стр. 182. Управляемые аттенюаторы 7, 8 - это блоки с переменным коэффициентом передачи, пропорциональным управляющему напряжению; возможная реализация такого блока описана в /6/, стр. 270. Линии задержки 5, 6, 23, 24 - кабельные или на элементах с сосредоточенными параметрами (конденсаторах и катушках индуктивности). Усилители 9, 10 промежуточной частоты и оптимальные фильтры 11, 12 описаны, например, в /4/, стр. 251, 162, 423. Сумматоры 13, 14 для сигналов промежуточной частоты выполняются по известной схеме /1/, стр. 74. Принцип построения синхронных детекторов 17, 18 описан в /4/, стр. 182. Полосовые фильтры 19, 20 (с полосой пропускания, равной ширине спектра радиолокационных сигналов) и амплитудные детекторы 21, 22 (детекторы огибающей) могут быть выполнены, как указано в /4/, стр. 163. Гетеродинный преобразователь частоты 27 может быть выполнен в виде гетеродина и балансного смесителя /4/, стр. 136. Вычислители отношения 25, 26 могут быть реализованы по одному из вариантов, описанных в /5/, стр. 281. Вычислитель минимума может быть построен на диодах и операционном усилителе, как показано в /5/, стр. 173.
Предлагаемый многоканальный приемник моноимпульсной РЛС работает следующим образом.
В процессе работы РЛС на выходах углового датчика 1 появляются эхо-сигналы целей, а также напряжения шумов и помех. Они подаются на ограничители 3, 4, в которых происходит нормирование сигналов, шумов и ограничение импульсных помех. После прохождения нормированной смеси сигналов, шумов и помех через линии задержки 5, 6, управляемые аттенюаторы 7, 8, усилители 9, 10 и оптимальные фильтры 11, 12, на выходах последних происходит выделение задержанных, усиленных и отфильтрованных сигналов, (согласованных по спектру с частотной характеристикой фильтров 11, 12) и подавление ограниченных в ограничителях 3, 4 помех (несогласованных с характеристикой фильтров).
Одно из N выходных напряжений углового датчика 1, кроме того, поступает на гетеродинный преобразователь частоты 27, в котором частота смеси сигналов и помех смещается на некоторую величину ΔF, выходное напряжение преобразователя 27 в сумматорах 13, 14 складывается с выходными напряжениями углового датчика 1, чем достигается частотное уплотнение выходных напряжений датчика 1 (каждого из N выходных сигналов с одним - опорным). В ограничителях 15, 16 происходит нормировка пеленгационных сигналов, т.е. такое преобразование спектров сигналов (одного из N и опорного), при котором спектральная плотность мощности большего сигнала (каждого из N) фиксируется, а меньшего (опорного, смещенного по частоте) - делается равной отношению уровней этих сигналов на входах ограничителей 15, 16.
В синхронных детекторах 17, 18 происходит выделение нормированных пеленгационных сигналов (опорных, смещенных по частоте) путем переноса их на частоту ΔF и дальнейшей фильтрации в полосовых фильтрах 19, 20, настроенных на эту частоту.
Указанные сигналы поступают на амплитудные детекторы 21, 22, которые вырабатывают напряжения, величины которых в каждый момент времени оказываются пропорциональными отношениям амплитуд опорного и каждого из N выходных сигналов углового датчика 1 (в каждом из N усилительных каналов).
В вычислителе 15 выбирается минимальное мгновенное значение выходных напряжений детекторов, в соответствии с которым в вычислителях 26, 25 вырабатываются управляющие напряжения, определяющие коэффициенты передачи аттенюаторов 7, 8.
Время задержки в линии 23 выбирается равным задержке в вычислителе минимума 28, а в линии 5 - задержке в синхронном детекторе 17, фильтре 19, амплитудном детекторе 21, линии 23 и вычислителе 25.
В результате совместной работы указанных выше блоков напряжение на выходе вычислителей 25, 26 равно одной из следующих величин:
- единице в том из N усилительных каналов, в котором мгновенное напряжение сигнала максимально;
- меньше единицы, пропорционально мгновенному напряжению данного выхода углового датчика 1 и обратно пропорционально наибольшему из его мгновенных напряжений в остальных усилительных каналах.
Выходные напряжения вычислителей 25, 26 управляют аттенюаторами 7, 8, в результате чего восстанавливаются соотношения амплитуд пеленгационных сигналов во всех усилительных каналах, при сохранении описанного выше подавления импульсных помех и выделении в оптимальных фильтрах полезных сигналов, которые сохраняют на входах углового дискриминатора 2 то же соотношение, что и на выходах углового датчика 1.
Повышение точности пеленгации в предлагаемом приемнике достигается благодаря тому, что динамический диапазон входных сигналов резко сжимается в ограничителях 3, 4, 15, 16 и блоки, обрабатывающие напряжения, содержащие пеленгационные соотношения (синхронные детекторы 17, 18, амплитудные детекторы 21, 22, вычислители 25, 26, 28, аттенюаторы 7, 8) работают в ограниченном динамическом диапазоне - не более 6-10 дБ. Их погрешности в таком диапазоне значительно меньше, чем погрешности аналогичных блоков прототипа, которые работают в полном динамическом диапазоне сигналов (до 40 дБ и более).
По сравнению с известным устройством, предложенный приемник обеспечивает повышение точности пеленгации в 3-5 раз; при этом динамический диапазон сигналов может быть расширен с 40 до 60 дБ. Это обеспечивает расширение функциональных возможностей и улучшения тактико-технических характеристик РЛС в целом, обеспечивает ее более надежную помехозащищенность в условиях сильного радиопротиводействия.
Литература
1. Д.И. Леонов, К.И. Фомичев, Моноимпульсная радиолокация, "Радио и связь", 1984 г.
2. Защита от радиопомех, под ред. М.В. Максимова, "Сов. Радио", 1976 г.
3. Рубин, Камен, Новый метод построения схем сравнения в моноимпульсной радиолокации, "Зарубежная радиоэлектроника" 1965, №8.
4. Справочник по радиолокации, под ред. М. Сколника, том 3, "Сов. Радио", 1979 г.
5. Справочник по нелинейным схема, под ред. А. Шейнголда, "Мир", 1977 г.
6. Кобболд, Теория и применение полевых транзисторов, "Энергия", 1975 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| УСТРОЙСТВО ПЕЛЕНГОВАНИЯ И АНАЛИЗА СИГНАЛА ИМПУЛЬСНЫХ РЛС С КОММУТАЦИОННЫМ ОБЪЕДИНЕНИЕМ ПРИЕМНЫХ КАНАЛОВ | 1989 |
|
SU1841032A1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| РАДИОПЕЛЕНГАТОР | 2012 |
|
RU2505831C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| ПРИЕМНОЕ УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС | 1995 |
|
RU2084919C1 |
| ТРЕХКАНАЛЬНЫЙ РАДИОЛОКАТОР | 1980 |
|
SU1840925A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
Изобретение относится к области радиолокациии и может быть использовано в обзорных моноимпульсных радиолокационных станциях. Достигаемый технический результат - повышение точности пеленгования. Указанный результат достигается за счет того, что многоканальный приемник содержит угловой датчик, угловой дискриминатор, N приемно-усилительных каналов, каждый из которых состоит из первого ограничителя, первой линии задержки, регулируемого аттенюатора и оптимального фильтра, содержит также гетеродинный преобразователь частоты, вычислитель минимума, кроме того, в каждый приемно-усилительный канал введены сумматор, второй ограничитель, синхронный детектор, полосовой фильтр, амплитудный детектор, вторая линия задержки и вычислитель отношения. Все перечисленные средства определенным образом соединены между собой. 1 ил.
Многоканальный приемник моноимпульсной радиолокационной станции содержащий угловой датчик с N выходами, угловой дискриминатор и N приемно-усилительных каналов каждый из которых состоит из последовательно соединенных первого ограничителя, первой линии задержки, регулируемого аттенюатора и оптимального фильтра причем каждый из N выходов углового датчика соединен со входом первого ограничителя соответствующего ему приемно-усилительного канала, выход оптимального фильтра каждого приемно-усилительного канала соединен с соответствующим ему входом углового дискриминатора, отличающийся тем, что, с целью повышения точности пеленгования, в него введены гетеродинный преобразователь частоты, вычислитель минимума, кроме того в каждый приемно-усилительный канал введены последовательно соединенные сумматор, второй ограничитель, синхронный детектор полосовой фильтр, амплитудный детектор, вторая линия задержки и вычислитель отношения, причем каждый из N выходов углового датчика соединен с первым входом сумматора соответствующего ему приемно-усилительного канала, один из N выходов углового датчика соединен со входом гетеродинного преобразователя частоты выхода которого соединены со вторыми входами сумматора соответствующего приемно-усилительного канала, вторые выходы амплитудных детекторов каждого приемно-усилительного канала соединены с соответствующими им входами вычислителя минимума выход которого соединен со вторым входом вычислителя отношения каждого приемно-усилительного канала; в каждом приемно-усилительном канале выход первого ограничителя соединен с опорным входом своего синхронного детектора, в каждом приемно-усилительном канале выход вычислителя отношения соединен с управляющим входом своего регулируемого аттенюатора.

