Предлагаемое устройство относится к области автоматики и может быть использовано для контроля отработки системой автоматического регулирования фиксированных угловых положений без остановки или отключения задающего датчика.
Известно устройство контроля системы автоматического регулирования, содержащее контрольный СКВТ-датчик, и реле, нормально-замкнутые контакты которого соединены с синусной и косинусной обмотками ротора рабочего СКВТ-датчика, нормально-разомкнутые контакты соединены с синусной и косинусной обмотками ротора контрольного СКВТ-датчика, а перекидные - с обмоткой возбуждения и квадратурной обмоткой рабочего СКВТ-приемника. Контроль системы производится при подаче команды контроля на обмотку реле, по которой исправная система устанавливается в положение контрольного СКВТ-датчика, и авторское свидетельство СССР №383008, М.кл. G05B 23/02 за 1970 год).
Наиболее близким по технической реализации является устройство контроля, содержащее реле, СКВТ-датчик, СКВТ-приемник, причем первый выход роторной обмотки СКВТ-датчика (например синусной) соединен с первым входом соответствующей статорной обмотки СКВТ-приемника и нормально-разомкнутым контактом реле, второй выход этой же обмотки СКВТ-датчика соединен с нормально-замкнутым, а второй вход соответствующей статорной обмотки СКВТ-приемника соединен с перекидным контактом реле.
Недостатками данного устройства контроля систем автоматического регулирования являются:
1. Его низкая надежность из-за низкой надежности реле, коммутирующего своими контактами индуктивную цепь (Cosφ<0,1), что приводит к уменьшению достоверности контроля.
2. Низкая достоверность контроля по обработке системой автоматического регулирования нулевого положения из-за возможности такого отказа системы, при котором она устанавливается в нулевое положение.
Целью настоящего изобретения является повышение надежности устройства контроля и достоверности контроля системы автоматического регулирования.
Поставленная цель достигается тем, что в устройство контроля, содержащее реле, и соединенные для отслеживания положения СКВТ-датчик и СКВТ-приемник, установленный на выходном валу системы автоматического регулирования, введено устройство сравнения, сумматор и задатчик напряжения, причем первый вход устройства сравнения соединен со входом, а второй - с выходом СКВТ-приемника, выход устройства сравнения соединен с нормально-разомкнутым контактом, реле, нормально-замкнутый контакт которого соединен с выходом СКВТ-приемника, а перекидной - с первым входом сумматора, второй вход которого соединен с выходом задатчика напряжения, а выход - со входом исполнительного устройства.
В предлагаемом устройстве контроля вычитание задающего сигнала и сигнала обратной связи системы производится не на СКВТ-приемнике системы, а на устройстве сравнения, в формировании выходного сигнала которого участвуют выходные сигналы СКВТ-датчика и СКВТ-приемника. Формирование сигнала разности указанным образом позволяет включить контакты реле в цепь с активной нагрузкой, чем повышается надежность устройства контроля, а также ввести при помощи задатчика напряжения и сумматора проверку правильности обработки не только нулевого, но и любого положения выходной оси системы в пределах от -90° до +90° без остановки или отключения СКВТ-датчика, что повышает достоверность контроля системы.
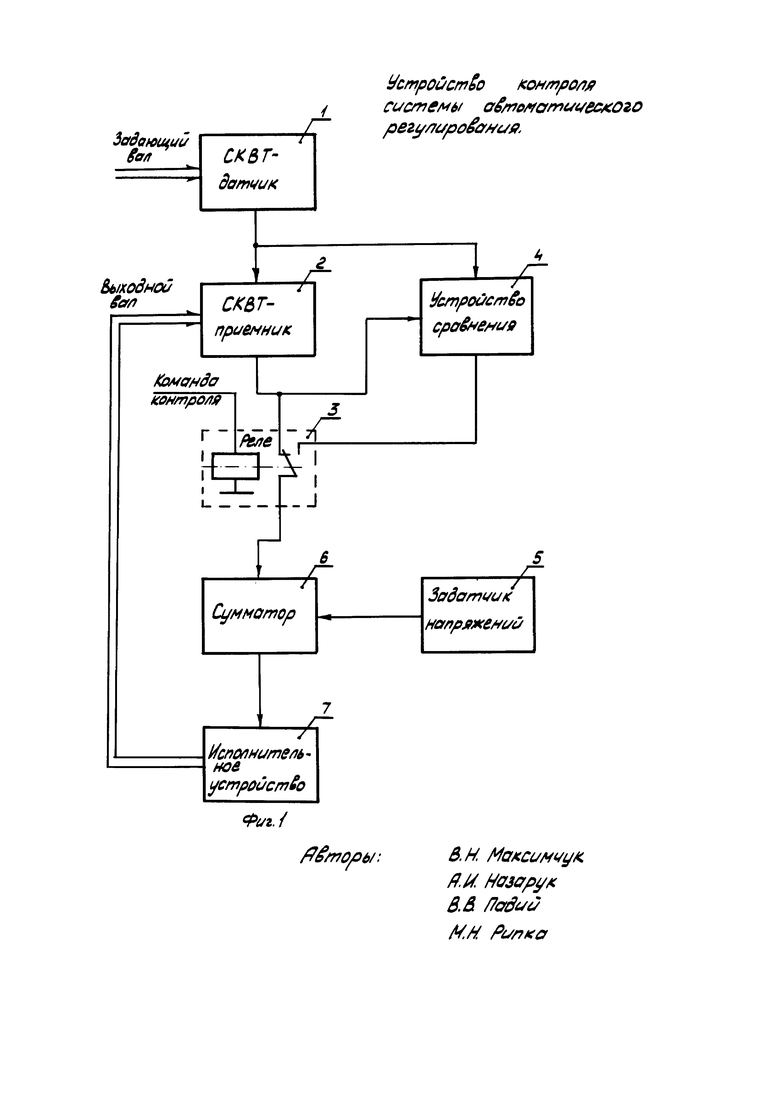
Функциональная схема устройства контроля системы автоматического регулирования представлена на фиг.1 и состоит из СКВТ-датчика 1, соединенного с СКВТ-приемником 2, вход и выход которого соединен с входами устройства сравнения 4, выход которого соединен с нормально-разомкнутым контактом реле 3, нормально-замкнутый контакт которого соединен с выходом СКВТ-приемника 2, а перекидной - с первым входом сумматора 6, второй вход которого соединен с выходом задатчика напряжения 5, а выход сумматора 6 соединен со входом исполнительного устройства 7.
Предлагаемое устройство контроля работает следующим образом: команда контроля поступает на обмотку реле 3, которое срабатывает и своим перекидным контактом подключает вход сумматора 6 и, следовательно, исполнительного устройства 7, к выходу устройства сравнения 4, на вход которого поступают сигналы со входа и с выхода СКВТ-приемника 2. В исправной системе вал СКВТ-приемника 2 устанавливается в такое положение, чтобы сигнал на выходе устройства сравнения 4 был близок к нулю, т.е. в данном случае работу исправной системы автоматического регулирования определяет тождество
Sinα-Sin(α-β)=0,
где α - угол поворота СКВТ-датчика;
β - угол поворота СКВТ-приемника,
которое справедливо при β=0. Следовательно, выходной вал установится в нулевое положение вне зависимости от положения задающего вала.
Для произведения контроля ненулевого положения выходного вала (или вывода системы из нулевого положения) соответствующее напряжение с задатчика напряжения 5 подается на вход сумматора 6. При этом выходной вал СКВТ-приемника 2 поворачивается на такой угол, чтобы компенсировать напряжение, поступающее с задатчика напряжения 5, и сигнал выхода сумматора 6 при этом становится нулевым. Следовательно, изменяя напряжение задатчика, можно менять угол поворота выходного вала системы автоматического регулирования.
Введение новых элементов: устройства сравнения, сумматора и задатчика напряжения и их соответствующее соединение выгодно отличают предлагаемое устройство от известного, поскольку в данном устройстве контакты реле работают на активную нагрузку и есть возможность контролировать положение выходного вала в пределах ±90°, что значительно повышает надежность устройства контроля и достоверность контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР СИСТЕМЫ СОПРОВОЖДЕНИЯ | 1978 |
|
SU1840907A1 |
| Устройство для формирования сектора запрета | 1981 |
|
SU964577A1 |
| УСТРОЙСТВО Для КОНТРОЛЯ СИНХРОННО-СЛЕДЯЩИХСИСТЕМ | 1969 |
|
SU251649A1 |
| Задающее устройство следящего электропривода | 1982 |
|
SU1056129A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ АВИАГОРИЗОНТА В ПИЛОТАЖНЫЙ КОМПЛЕКС | 2002 |
|
RU2213938C1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752428A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
Изобретение относится к области автоматики и может быть использовано для контроля системой автоматического регулирования фиксированных угловых положений без остановки или отключения задающего датчика. Технический результат - повышение надежности устройства контроля и достоверности контроля системы автоматического регулирования. Для этого устройство содержит коммутационный элемент и датчики перемещения, выполненные в виде синусно-косинусного вращающегося трансформатора, выход первого из которых подключен ко входу второго, кинематически связанные соответственно с задающим валом и выходом исполнительного блока, сумматор, компаратор и блок задания напряжений, подключенный к одному входу сумматора, выход которого соединен со входом исполнительного блока, а другой вход сумматора соединен с выходом коммутационного элемента, подключенного первым входом к управляющему входу устройства, вторым входом к выходу компаратора, а третьим входом к одному входу компаратора и выходу второго синусно-косинусного вращающегося трансформатора, вход которого соединен с другим входом компаратора. 1 ил.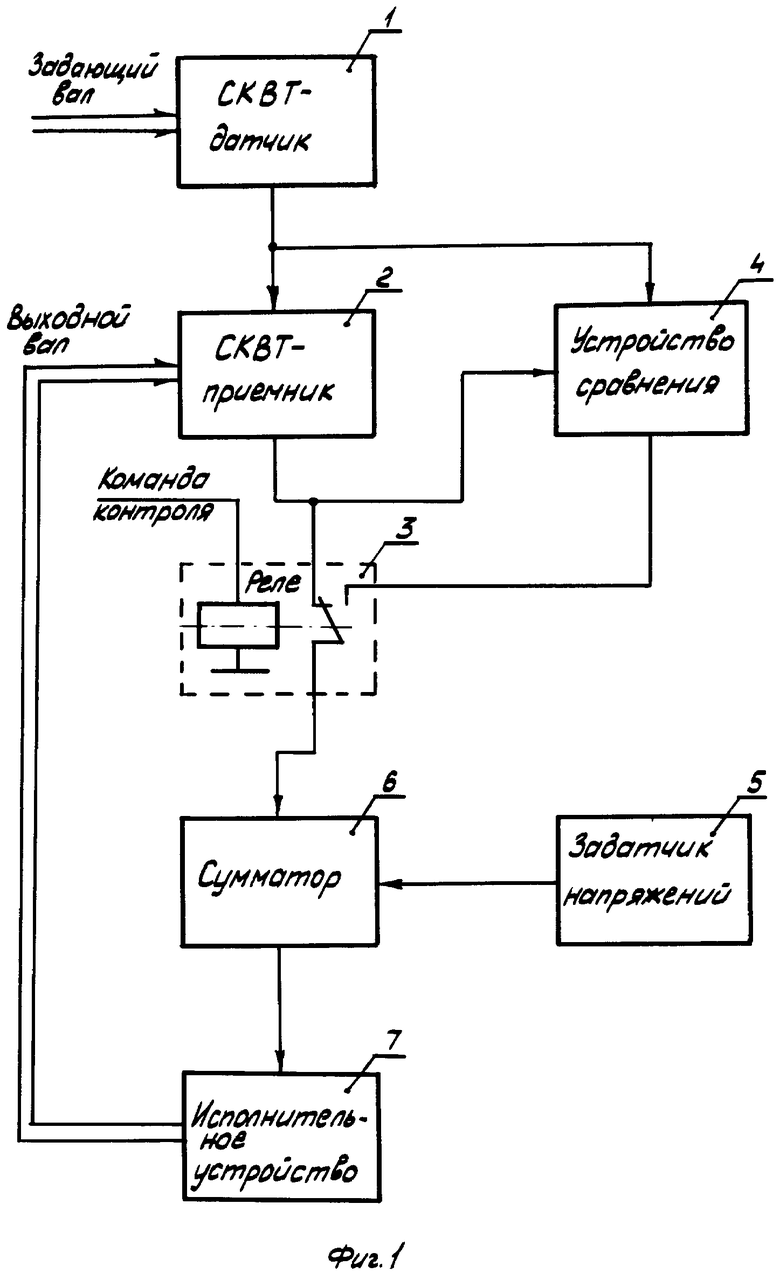
Устройство для контроля систем автоматического регулирования, содержащее коммутационный элемент и датчики перемещения, например, синусно-косинусные вращающиеся трансформаторы, выход первого из которых подключен ко входу второго, кинематически связанные соответственно с задающим валом и выходом исполнительного блока, отличающееся тем, что, с целью повышения точности и надежности устройства, оно содержит сумматор, компаратор и блок задания напряжений, подключенный к одному входу сумматора, выход которого соединен со входом исполнительного блока, а другой вход - с выходом коммутационного элемента, подключенного первым входом к управляющему входу устройства, вторым - к выходу компаратора, а третьим входом - к одному входу компаратора и выходу второго синусно-косинусного вращающегося трансформатора, вход которого соединен с другим входом компаратора.

