Известные устройства для наблюдения и регистрации результатов моделирования динамических объектов позволяют регистрировать временные изменения координат объекта или фазовый портрет.
При моделировании плоскопараллельпого движения звеньев механической системы возникает необходимость наблюдать и регистрировать не изменение координат, а непосредственно движение звеньев, т. е. получать их изобрал :ение, движуш;ееся в соответствии с решае{.1ыми уравнениями.
Предлагаемое устройство, позволяет решить эту задачу и получить изображение как одного, так и нескольких движущихся звеньев на экране электронного осциллографа постоянного тока. Оно содержит синусный и косинусный преобразователи,- вычисляющие синус и косинус угла поворота звена, выход каждого из которых через модулятор и сумматор соединен с одним из входов осциллографа. KpoAie того, в нем предусмотрен дифференциальный релейный элемент, управляющие входы которого соединены с генератором модулирующего напряжеипя, а контакты расположены во входных цепях устройства, коммутируя их с выхо.ами аналоговой вычислительной машины.
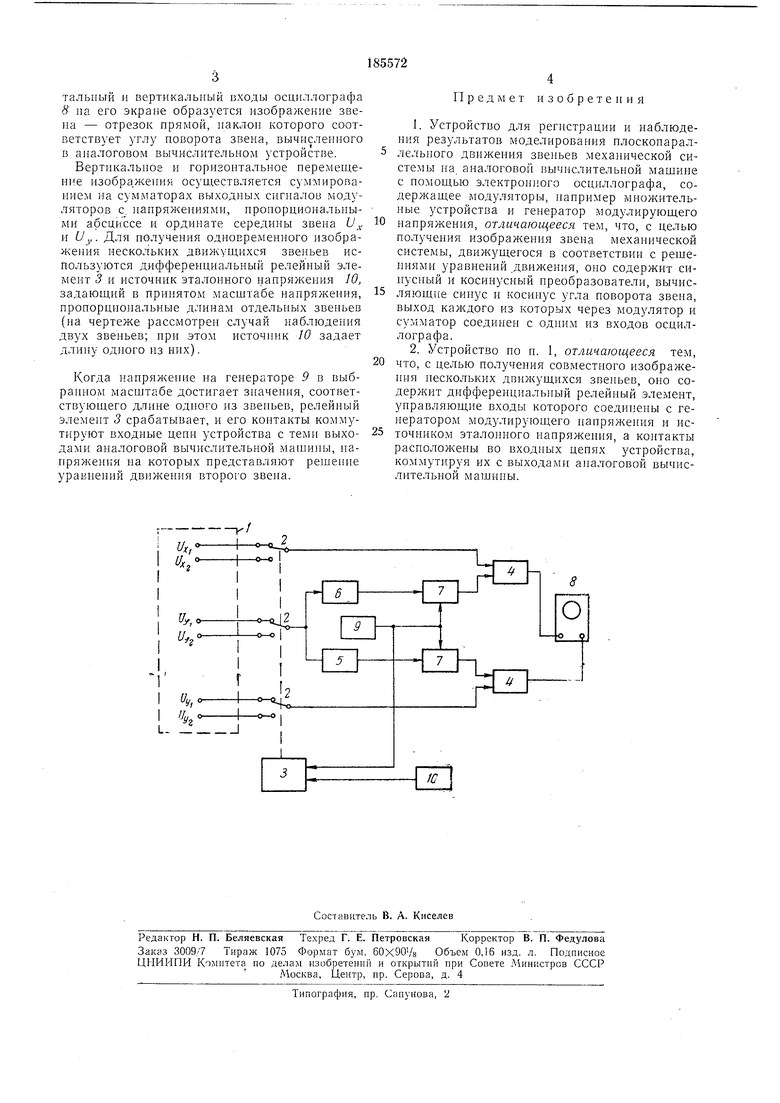
ны /, напряжения на которых соответствуют положению центра тяжести звена, через контакты 2 дифференциального релейного элемента 3 соединены со входами сумматоров 4, а выходы, напряжения на которых представляют угол поворота, также через контакты 2 соединены с синусным 5 и косинусным 6 нреобразователямн. Выходные напряжения преобразователей модулируются модуляторами 7, которые могут быть реализованы на множнтельиых устройствах аналоговых машин, и поступают на сумматоры 4. Выходы сумматоров соединены с горизонтальным и вертикальным входами осциллографа 8 постояпного тока.
Устройство содержит также генератор 9 модулирующего сигнала и источник эталонного напряжения 10.
Работа устройства
Напряжения U-, соответствующие углу поворота звена, поступают на сииусный 5 и косинусный 6 преобразователи п затем модулируются. При этом на выходах модуляторов 7 образуются синусоидальные сигналы, амплитуды которых пропорциональны соответственно синусу и косинусу угла новорота; коэффициент проиорцнопальпости устанавливается в принятом масштабе, равном половине длины звена. При подаче этнх сигналов на горнзонтальпый и вертикальный входы осциллографа S на его экране образуется изображение звена - отрезок прямой, наклон которого соответствует углу поворота звена, вычисленного в аналоговом вычислительном устройстве.
Вертикальное н горизонтальное перемендение изобра.жения осуществляется суммированием на сумматорах выходных сигналов модуляторов с. напряжениями, пропорциональными абсциссе и ординате середииы звена U и Ну. Для получения одновременного изображения нескольких движущихся звеньев используются дифференциальный релейный элемент 3 и источник эталонного напряжения 10, задающий в принятом масштабе напряжения, нропорциопальные длинам отдельных звеньев (на чертеже рассмотреп случай наблюдения двух звеиьев; при этом источник 10 задает длину одного из них).
Когда напряжение на генераторе 9 в выбранном масщтабе достигает значения, соответствующего длине одного из звеиьев, релейный элемент 3 срабатывает, и его контакты коммутируют входные цепи устройства с теми выходами аналоговой вычислительной мащины, напряжения на которых представляют решение уравнений двнжеиия второго звена.
Предмет изобретения
1.Устройство для регистрации и наблюдения результатов моделироваиня плоскопараллельиого движения звеиьев механической системы на, аналоговой вычислительной мащине с помощью электронного осциллографа, содержащее модуляторы, ианрнмер множительиые устройства н генератор модулирующего панряжения, отличающееся тем, что, с целью получения изображеиня звена механнческой системы, движущегося в соответствии с решениями уравнений движения, оно содержит синусный и косинусный нреобразователи, вычисляющие синус и косинус угла поворота звена, выход каждого из которых через модулятор и сумматор соединеи с из входов осциллографа.
2.Устройство но н. 1, отличающееся тем, что, с целью получения совместцого нзображения иескольких движущихся звеньев, оно содержит дифференциальиый релейиый элемент, унравляющие входы которого соединены с генератором модулирующего напряжения и источником эталонного напряжения, а контакты расположены во входных цепях устройства, коммутируя их с ВЕ гходами аналоговой вычислительной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU980112A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Преобразователь кода в угол поворота вала | 1989 |
|
SU1711330A1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ КОДА УГЛА В СИНУСНО-КОСИНУСНЫЕ НАПРЯЖЕНИЯ | 2003 |
|
RU2246175C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УГЛОВОЙ МОДУЛЯЦИИ СИГНАЛА | 2003 |
|
RU2260901C1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ КОДА УГЛА В СИНУСНО-КОСИНУСНЫЕ НАПРЯЖЕНИЯ | 2006 |
|
RU2310986C1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1312737A1 |
