Известиы стереофотограмметрические приборы для обработки аэроснимков и снимков наземиой стереосъемки, основанные на ортогональном проектировании, содержание каретки бинокулярной наблюдательной системы, каретки для сннмков, мостик отстояний с каретками и п.чоские нроецирующие рычаги.
Онисываемый прибор нозволяет новысить точность и ироизводительность стереофотограмметрическнх работ, а также расширить возможность обработки сверхширокоугольных аэроснимков с подобными связками и исключить необходимость введения децентраций путем введепия поправок за углы наклонов аэроснимков в положение кареток для снимков и кареток наблюдательной системы. С этой целью в приборе все четыре нроекти;)уюп1их рычага выполнены в виде конвергентпых устройств, каждое из которых соединено с тангенсным устройством, содержащим линейку, устаиавливаемую в процессе ориентирования па соответствующий угол наклона, и коптактирующий с рычагом ролик каретки, перемещающейся параллельно одной пз осей прибора, причем связь конвергентных и тангенспых устройств осуществлепа посредством сельспиных нередач.
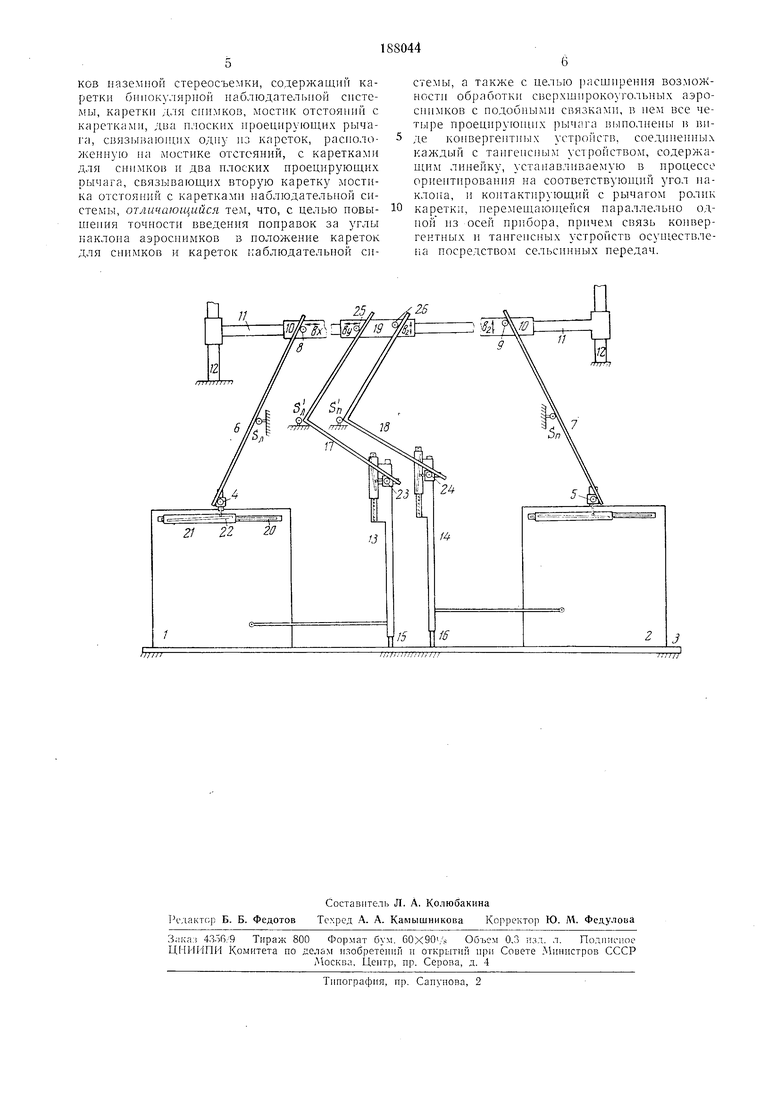
ся вдоль ненодвижиой направляющей 3 (движение X) через ролики 4 и 5 связаны с прецизионными стержнями 6 и 7, вращающимися вокруг неподвил ных центров проекции 5 и 5„. В верхней части стержни 5 и 7 ирижаты к роликам S п 9 каретки отстояний 10. Последняя может перемещаться вдоль нижней части мостика отстояинй 11. Мостик отстояний перемещается вдоль ненсдвижных направляющих 12, перпендикулярных направляющей 3. Наблюдательная система выполнена в виде двух рукавов 13 н 14, перемещающихся вдоль пеподвнжных направляющих /5 и 16. Через угловые стержни 17 и 18, вращающиеся вокруг иеподвпжпых точек 5., и S,,, расположенных на нрямой S,S, рукава связаны с кареткой 19, которая неремещается вдоль верхней частн мостика отстояний //.
Ведущие звенья прибора - каретка W ( вдоль нижней частн мостика 11 - движение X); мостик // (движется вдоль направляющих 12 - движение Z); каретка 19 (движется вдоль верхней части мостика 11 -
движение У).
При обработке снимков в кассеты кареток / и 2 закладывают левый и правый снимки стереопары пдеальпого случая аэрофотосъемки, центрпруют их и ориентнруют но нанын базис проецирования (движением Ьх ролика 8). Движениями X, У, Z добиваютс.ч етереоеконического совмещения марки с какой-1(} точкой стереомоде.ли; каретки 10, 9 н мостик // определят координаты соответствующей точки .местности X, У, Z. BpaH ieiiHe винтов, вызывающее перемещение кареток 10 и 19, с HOMonibio сельсииов передается на координатограф (на чертеже пе иоказаи), на котором и составляется топографический плаи. Так как снимки н базис фотографнроваиия обычно имеют углы наклонов, то для определения величин X и Z точек местности в случае обработки реальных аэроснимков прибор снабжен конвергентными устройствами.
Влияние продольных углов наклона снимков учитывается постоянными для данной сте еопары перегибами прецизионных стержней 6 и 7 в точках S, и 5„ (аналогично конвергентпому устройству в стереоавтографе Цейсе 1318) на углы, равные нродольным углам наклона аэроснимков.
Влияние ноперечиых углов наклона учитывается коррекционпыми нриспособлепиямн у sin со, вводящими в ролики 4 и 5 по ианравлениям, нерпепдикулярпым направляющей 3, смещения, ;)авпые соответственно у., sin со и у„ sincD,,, где у I и у „ ординаты наблюдаемой точки па левом и нравом аэроснимках, а oj.j и ш„ - поперечпые углы наклонов левого и правого аэроснимков.
Для введения коррекции на каретке / имеется бесконечный винт 20, ось которого параллельна направляющей 3 прибора. Вращеиие.м этого ви1гга перемещают каретку 21. На каретке 21 имеется линейка 22 (линейка w,j), развернутая от юсительно оси X-X нрнбора на угол со,,. К линейке 22 прижат ролик, жестко связанный с кареткой, песуп1ей ролик 4. Если каретка 21 перемендается на величнну у,, ролик 4 непрерывно получает необходимые величипы с.мещеппй. Линейное переMei-Цение левого рукава наблюдательной систе.мы с номощью рейки и щестерни (на чертел е не показаны) нреобразуется во вращательное, которое передается па винт 20. ВраН1,ение этого виита заставляет каретку 21 иеремещаться па величииу у. При перемещении каретки / вдоль нанравляющей 3 на величину X, винт 20 скользит в,доль щтока (не ноказаи), не вызывая с.меидения каретки 21 относительно каретки /. При электрической передаче следует установить один сельсин на валу щестерии, а второй - на виите 20, осуществляя при этом передачу двпжеппя г/,, па каретку 21. Аналогично должно быть устроено и нравое коррекционное ирпспособлепне У л sin со,,.
При правильной устаиовке коивергентных устройств и коррекцно пп 1х нриснособлений у sin со, а также Ь, (ролик 8)
и &,
(ролик 9
ности Z и X -- в соо1т5е1ствии с лютодом ортогонального проектирования.
Взаимное О)иент11роиание и {)и)еде;1ение точек местност аналогично только что рассмотренному определению X и Z, угловые стержни 17 и 18 выиолнены также в виде конвергентных устройств (со), а ролики 23 и 24 могут неремещаться с номощью коррекционных прпснособлений х sin а но направлениям, параллельным оси X-.Y прибора, соответственьо иа ве чичины х-, sin а, и .1„ since,,. Эти ириспособления аналогичны рассмотренным ранее приспособлениям у sin со.
Если конвергентные устройства со перегнуть относительно прямого утла па со, (левое устройство) и С1)„ (правое устройство), линейки коррекционных приспособлепий xsina уста ювить на углы сс, и а., а ролики 25 и 26
установить в соответствии с &., и 6,,, то очевидпо, что при наведении на какую-то точку стереопары ноперечпый параллакс будет отсутетвовать, а положение каретки 19 определит величину У точки местности, соответствуюлцей наблюдаемой точке.
После взаимного ориентирова1и-1я обычным образом производится геодезическое ориентирование, а затем и составление топографического плапа.
Для ориептирования без деиентраций в предлагаемом приборе ролики 4, 5, 23, 24 можпо устанавливать в соответствии с фокусным расстояннем аэрофотосъемочного аппарата в интервале от 70 до 210 мм.
Для рисовки рельефа на увеличенных аэроснимках па стОьЧике, соединеииом с кареткой 1, имеется пантограф, соединенный с обводJHJM шпилем, который жестко связан с левым рукавом наблюдательной системы.
Таким образом, предложенный прибор позволяет:
1.Осуществлять взаимпое ориептировапие аэроснимков; составлять топографический план по аэроспимкам или рисовать рельеф на
увеличенных аэроснимках при автоматическом устранении поперечных параллаксов; производить пространствепиое фототриапгулировапие.
2.Использовать для взаимного ориентироваиия и оиределеиия высот разные части кинематической цепи таким образом, что иисчрументальные ощибки одиой части не передаются на другую и наоборот.
3.Обрабатывать короткос))окуспые аэроснимки с нодобными связками и без децептраций, нричем, для изменения фокусных расстояний пе нужно менять ни ноложение кареток со снимками, ни положение центров проекций; обрабатывать аэроснимки с преобразоuainn iMn связками.
ков наземион стереосъемки, содержащий каретки бинокулярной иаблюдательион систел Ы, каретки для сиимков, мостик отстояиий с каретками, два плоских ироецирующих рычага, С1зязываюии1х одиу из кареток, расположенную на мостике отстсяний, с каретками для сиимков и два плоских нроецируюи1,их рычага, связываюпдих вторую каретку мостика ОТСТОЯ1Н1Й с каретками наблюдательной системы, отличающийся тем, что, с целью иовыигеиия точности введения поправок за углы наклона аэроснимков в положение кареток для сиимков и кареток наблюдательной сиd .- 2f
стемы, а также с целью расширения возможности обработки сверхширокоугольиых аэросннмков с подобными связкамн, в нем все четыре нроецируюнщх рычага В1)1полнены в виде конверге1ггиых устройств, соединенных каждый с таигеисным устройством, содержащим линейку, устанавливаемую в процессе ориентирования на соответствующий угол иаклоиа, и контактирующий с рычагом ролик каретки, перемещающейся параллельно одной из осей нрнбора, причем связь конвергентных и тангенсных устройств осун1ествлеFia посредством сельснниых передач. I 22 20
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный стереоавтограф | 1960 |
|
SU134450A1 |
| Топографический стереометр | 1948 |
|
SU85101A1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР ДЛЯ ОБРАБОТКИ ПЛАНОВЫХ АЭРОСНИМКОВ | 1971 |
|
SU318815A1 |
| Топографический стереометр | 1956 |
|
SU123318A1 |
| Коррекционное приспособление к топографическому стереометру | 1951 |
|
SU94822A1 |
| УНИВЕРСАЛЬНЫЙ | 1971 |
|
SU315922A1 |
| Стереопреобразователь | 1955 |
|
SU110486A1 |
| Стереофотограмметрический прибор | 1979 |
|
SU808844A1 |
| Коррекционное приспособление к топографическому стереометру | 1952 |
|
SU99636A1 |
| Топографический проектор | 1960 |
|
SU135238A1 |
16
2 3
