Изобретение относится к устройствам, обеснечиваюндим автоматизированное управление кабелеукладочной машиной с лриценным или навесным кабелеукладчиком при извлечени-и или укладке кабеля в грунт, когда к последнему .подключен источник неременного тока, расположенный вне машины, и когда точное ноложение трассы уложенного в грунт кабеля неизвестно или когда работы ведут в условиях плохой видимости.
Известные аналогичные устройства, состояш.ие из индуктивных датчиков, усилителей, преобразователя сигналов, индикатора и исполнительных элементов, дают серьезные погрешности при измерении. Последние обусловлены рядом факторов, в частности: непрерывными изменениями расстояния :между датчиками и кабелем в вертикальной нлоскости, колебаннями силы тока в кабеле, изменениЯМн коэффициента усиления любого из двух канаЛО.В усиления, вызывающими иестабильность усиления сигнала рассогласования.
Предлагаемое устройство позволяет устранить погрениюстп горизонтальной орнентации датчиков.
Устройство отличается от известных тем, что два кдентнчиых горизо гтальных датчика расположены симметрично и нериендикулярно вертикальной ллоскости, прох1одяш;ей через ось кабеля. Кроме того, преобразователь сигнала
состоит из двух сумматоров, формируюш,их разностный и суммарный силналы от датчиков. и третьего сумматора, формируюш,его фазомодулированный сигнал рассогласования.
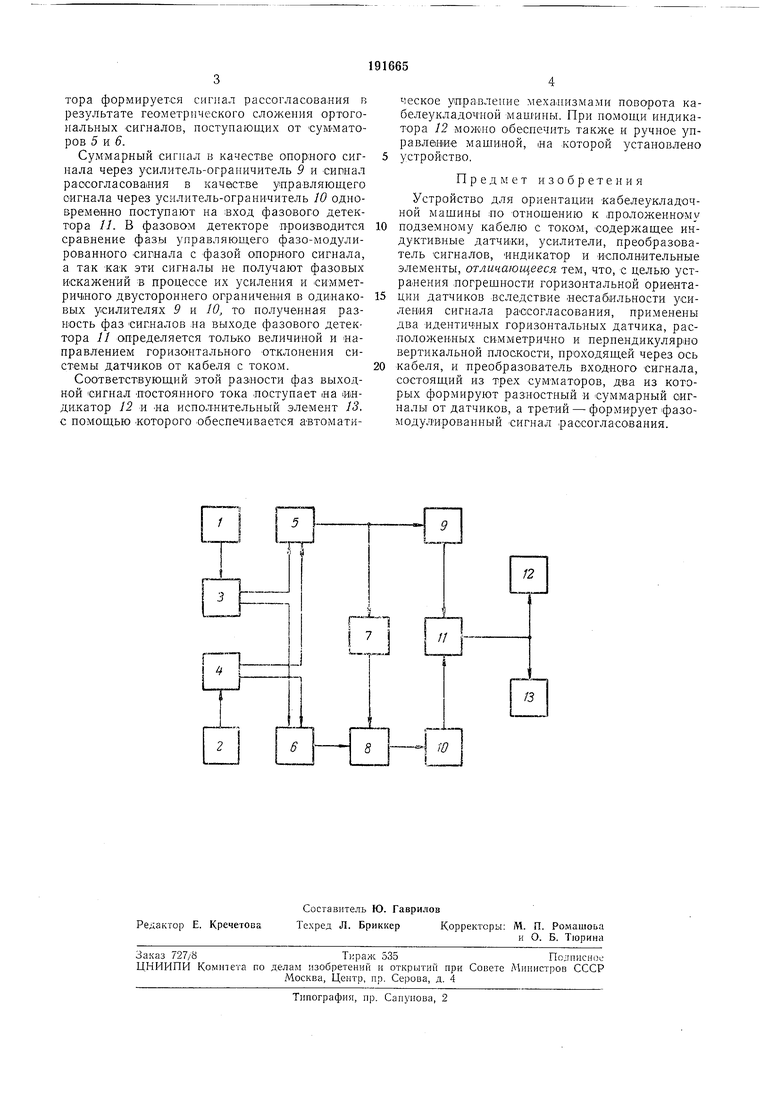
На чертеже представлена блок-схема устройства, которое содержит два индуктивных датчика 1 и 2, узлы фазового модулятора 3-8, два усилителя-ограничителя 9 и 10, фазовый детектор 11, индикатор 12 и исполнительный элемент 13.
Устройство работает следуюш.им образом.
Входные сигналы, индуктированные в датчиках / и 2, настроенных -в резонанс на частоту тока в кабеле, поступают через предварительные каскады 3 и 4 модулятора иа два сумматора: синфазно на сумматор 5 и в противофазе на сумматор 6. Датчики 1 и 2 имеют горизонтальное расположение магнитопроводов и вынбсе}1ы в сторону симметрично так, чтобы в полосе допустимых горизонтальных неремеш,ений датчиков относительно кабеля суммарный сиг}1ал в су.мматоре 5 изменялся незначительно.
Далее суммарный сигнал преобразуется фазоврагцателем 7, уМеньп ается по амплитуде и сдвигается относительно первоначального значения ло фазе на 90°. В сумматоре 6 получается разностный сигнал в .результате сложения в противофазе входных сигналов от двух датчиков 1 и 2. Е сумматоре 8 фазового модулятора формируется сигнал рассогласования в результате геометрического сложения ортогональных сигналов, ноступающих от сумматоров 5 и 6.
Суммарный сигнал в качестве опорного сигнала через усилитель-ограничитель 9 и сипнал рассогласования в качестве управляющего сигнала через усилитель-ограничитель W одновременно поступают на ;вход фазового детектора //. В фазовом детекторе производится сравнение фазы управляющего фазо-модулированного сигнала с фазой олориого сигнала, а так как эти сигналы не получают фазовых искажений -в процессе их усиления и симметричного двустороннего ограничения в одинаковых усилителях 9 и 10, то полученная разность фаз сигналов на выходе фазового детектора 11 определяется только величиной и направлением горизонтального отклонения системы датчиков от кабеля с током.
Соответствующий этой разности фаз выходной сигнал ПОСТОЯННОГО тока поступает на «нди,катор 12 и на исполнительный элемент 13. с помощью которого обеспечивается автоматическое управление мехаашзмами по.ворота кабелеукладочной маитипы. При помощи индикатора 12 можно обеспечить также и ручное управление машиной, на которой установлено устройство.
Предмет изобретения
Устройство для ориентации кабелеукладочной мащипы но отнощению к .проложенному
подземному кабелю с током, содержащее индуктивные датчики, усилители, преобразователь сигналов, Индикатор и исполнительные элементы, отличающееся тем, что, с целью устранения ногрещности горизонтальной ориентадии датчиков вследствие нестабильности усиления сигнала рассогласования, применены два идентичных горизонтальных датчика, расположенных симметрично и перпендикулярно вертикальной плоскости, проходящей через ось
кабеля, и преобразователь входного сигнала, состоящий из трех сумматоров, два из которых формируют разностный и суммарный сигналы от датчиков, а третий - формирует фазомодулнрованный сигнал рассогласования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU744432A1 |
| Способ определения резонанса измерительной цепи и устройство для его осуществления | 1990 |
|
SU1725161A1 |
| Способ определения искривления буровой скважины | 1978 |
|
SU791958A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1119044A1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| Способ дистанционного контроля лифтов и устройство для его осуществления | 2016 |
|
RU2661256C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СИСТЕМА РАДИОСВЯЗИ | 1992 |
|
RU2085038C1 |
| Совместимая система стереофонического вещания | 1987 |
|
SU1450120A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
Г р
L..
