В liJisecTiibie самоходные конры, включающие тягач, неподвижную раму и конровую стрелу, не обеспечивается возможность изменения вылета рабочей стрелы.
Пpeдлarae ьгй свайный копер н(;зполяет ато сделать.
Достигается это тем, что рабочая стрела прикреплена к неподвижной раме копра посредством объединенных крестовым шарниром горизонтальной тягн и подвижной рамы, для перемещения которой служит силовой цилиндр, прикрепленный также к ненодвижной раме.
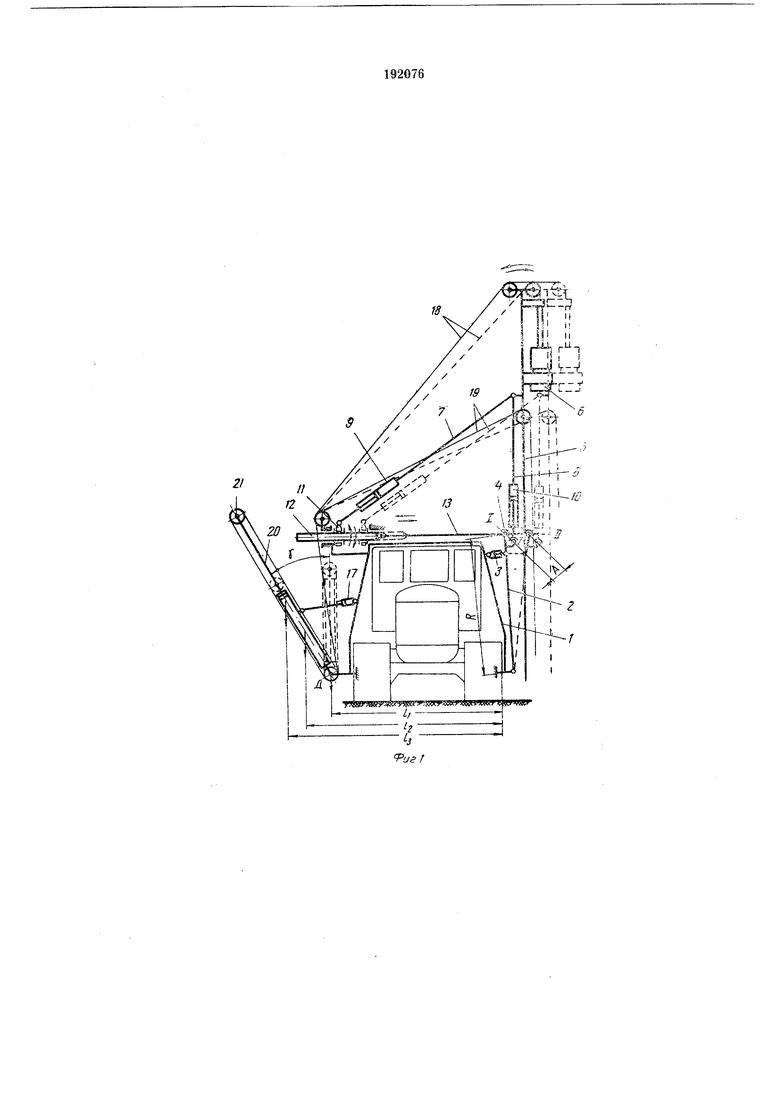
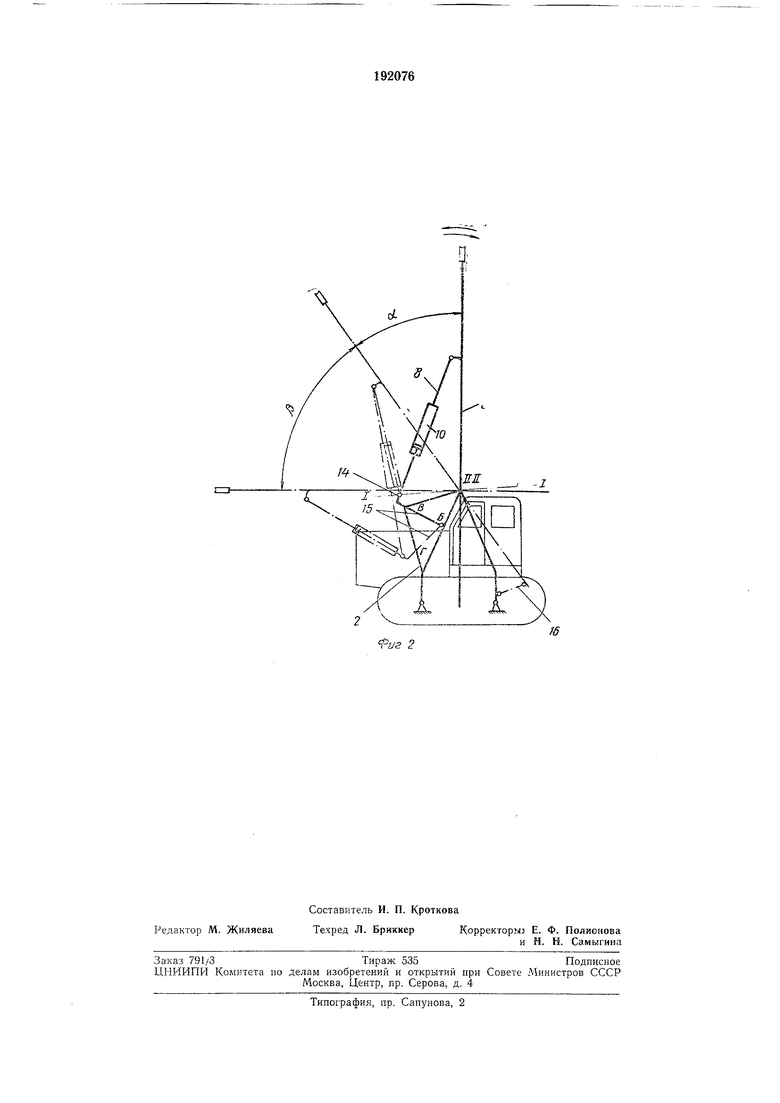
На фиг. 1 и 2 изображен предлагаемый копер Н дву.х проекциях.
На тягаче, например, гусеничном тракторе, смонтирована неподвижная рама 1. На ней сбоку трактора шарнирно закреплена нодвил 1ая рама 2, качающаяся с помощью гидроцилиндра 3. Рама J, качающаяся рама 2 и гидроцилнндр 3 образуют щарнирный треугольник, на подвижной верщине которого закреплен крестовый шарнир 4, несущий направляющую 5 для свайного молота 6.
Крестог5ый шарнир 4 позволяет направляю}цей наклоняться как в поперечном., так и в продольном направлениях. В поперечном направлении она удерживается раскосом 7 переменной длины, а в продольном - раскосом 8.
вмонтирОЕан1НУ.мн в них силовымн цилиндраМП 9 и 10.
При изменении длины раскоса 7 направляющая 5 будет наклоняться в поперечном направлении, поворачиваясь относительно оси /-/. Прн изменении длины раскоса 8 направляющая 5 будет наклоняться в нродольном нанраБленнн относительно поперечной оси //-//, которая перпендикулярна оси /-/.
Нижний конец раскоса 7 (шток силового цилиндра 9) прикренлен шарнирно к иоворотному кронщтейну Л, сидящелп иа ползуне 12, имеюндем возможность неремещаться в подщииниках, закрепленных на раме /. Ползун 12
жесткой горизонтальной тягой /5 щарннрно соединен с качающейся рамой 2.
Рама 2 вместе с направляющей 5 и раскосом S и снловыл цнлиндром 3 перемещается в поперечном направлении и при этом тягой 13
увлекает за собой ползун 12 вместе с кронштейном // и раскосом 7. При этом ось /-/ переклеивается ио дуге радиуса R на ход. равный хорде Л.
Нижиий конец раскоса 8 (плток силового
цилиндра 10) через крестовый щарнир 14 закреплен на кронщтейне 15, который, в свою очередь, закрепляется на качаюгцейся раме 2. Кронщтейн 15 имеет возможность поворачнват1 ся отиосителыю оси Б и может запизакрепление в точке В, второе - закрепление в точке Г.
Для перевода копра из рабочего положения в транспортпое силовым цилиндром 10, направляющая 5 новорачивается относительно оси //- на угол а и временно закрепляется связью 16 с качающейся рамой 2.
Затем крепление кронщтейна 15 в точке В убирается, после чего силовым цилиндром 10 кронщтейн 15, поворачиваясь относительно оси Б, переместится вниз и закрепляется в точке Л а связь 16 убирается.
Далее силовым цилиндром 10 направляющая 5 поворачивается дополнительно на угол 3 в положение, соответствующее транспортному.
Перевод нанравляющей 5 из транспортного положения в рабочее производится в обратной последовательности.
При повороте относительно поперечной оси //-// вместе с направляющей 5 поворачиваются на тот же угол раскос 7, силовой цилиндр 9 и кронщтейн 11.
На тягаче с противоположной направляющей 5 стороне с помощью оси Д и гидроцилиндра 17 к раме / прикреплено устройство для подъема дюлота и сваи, выполненное целым блоком из двух гидроцилиндров с канатными полиспастами. От неподвижных обойм полиспастов через промежуточные ролики отводятся канаты 18 и 19, соответственно для подъема молота и сваи. Подвижные обоймы полиспастов закреплены жестко на щтоках гидроцилиндров. При перемещении подвижных обойм происходит соответственно подъем молота и сваи.
Для обеспечения грузовой устойчивости свайного копра без применения дополнительного груза (нротивовеса), увеличивающего
вес копра, используется устройство для подъема молота и сваи.
Меняя гидроцилиндром 17 положение блока грузоподъемных цилиндров от вертикального 5 положения до наклонного (угол -у) и увеличивая тем самым плечо от ребра опрокидывания до центра тяжести блока, получаем разные удерживающие моменты: на плече /i - транспортное положение, на плече U - положение,
0 при котором удерживающий момент достаточен для ноднятия молота. При подъеме молота шток 20 вместе с подвижной обоймой 21 перемен 1,ается в верхнее положение центра тяжести блока, который при поднятом молоте
5 будет находиться на нлече /з. В таком положении свайный копер будет обладать грузовой устойчивостью, достаточной для поднятия сваи.
Требуемый для поднятия сваи удерживающий момент, равный весу блока, умноженный на разницу в нлечах (is--k), автоматически устанавливается при поднятом молоте.
При забивании сваи и связанном с этим опускании молота будет опускаться и щток 20
5 с подвижной обоймой 21, т. е. будет автоматически изменяться удерживающий момент.
Предмет изобретения
0 Самоходный свайный копер, включаю1ций тягач, неподвижную раму и копровую стрелу, отличающийся тем, что, с целью обеспечения возможности изменения вылета рабочей стрелы, последняя прикреплена к неподвижной раме копра посредством объединенных крестовым щарниром горизонтальной тяги и подвижной рамы, для перемещения которой служит силовой цилиндр, прикрепленный также к неподвижной раме.
21

| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДВИЖНОЙ СВАЙНЫЙ КОПЕР | 1968 |
|
SU210753A1 |
| САМОХОДНЫЙ СВАЙНЫЙ КОПЕР | 1969 |
|
SU236338A1 |
| ПЛАВАЮЩИЙ САМОХОДНЫЙ КОПЕР | 2023 |
|
RU2815798C1 |
| Копер для забивки свай | 1972 |
|
SU440474A1 |
| Свайный копер | 1977 |
|
SU876850A1 |
| УСТАНОВКА ДЛЯ ПОГРУЖЕНИЯ СВАЙ ИЛИ ШПУНТА | 1998 |
|
RU2130994C1 |
| Свайный копер | 1977 |
|
SU631596A1 |
| Свайный копер | 1979 |
|
SU909013A1 |
| Навесной гидравлический копер для одноковшового экскаватора | 2023 |
|
RU2826885C1 |
| СВАЙНЫЙ КОПЕР | 1968 |
|
SU207119A1 |