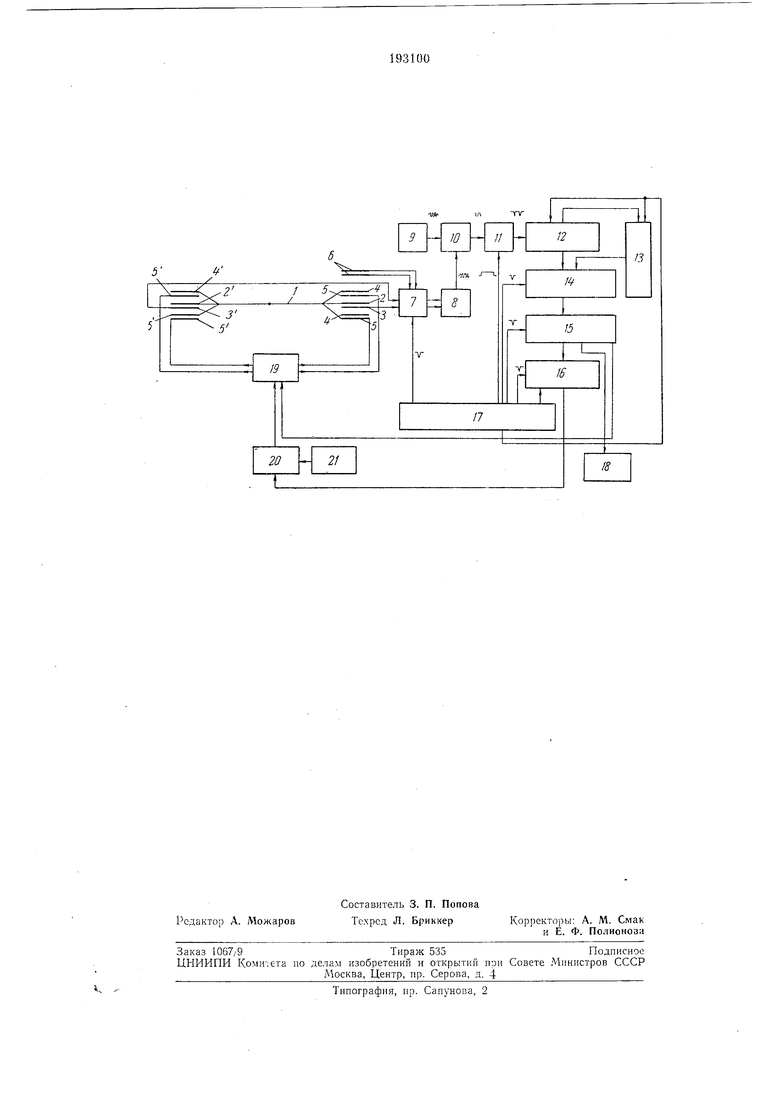
Известны цифровые автоматические гравиметры для измерения силы тяжести в движении, содержащие уиругую чувствительную систему, рычаг которой удерживается в исходном положении системой обратной СВЯзи, генератор, управляемый упругой системой, блок формирования импульсов, генератор импульсов стандартной частоты, коммутирующей блок, источник стабильиого напряжения и регистрирующее устройство. Предложенный гравиметр отличается от известного тем, что в нем рычаг чувствительной системы выполнен в виде кварцевого коромысла с гребенками, перемещающимися между аналогичными гребеиками, закреилеинымн неподвижно на корпусе так, что пара из них образует емкостной датчнк, а остальные - устройство возвратного потенциала, дополнительно введен смеетитель, соедииениый с генератором стандартной частоты и через блок формирования импульсов со счетно-решающим устройством, и эталонная емкость, подключеиная к коммутирующему блоку, связанному с управляемым генератором; а счетно-решающее устройство содержит связанные между собой цифровой двоичный счетчик и регистр нульотсчета, подключенные ко входу цифрового сумматора, соедииенного последовательно с регистром сигиала рассогласования и цифровым преобразователем, и связаниые с соответстпующнми выходами цифрового блока управления, а устройство возвратного потенциала вынолнено В виде коммутирующего блока, подключенного к неподвижным гребенкам чувствительной системы и связанного через блок формирования импульсов со счетно-решающим устройством. Такое конструктивное выполнение гравиметра нозволит повысить точность измерений и исключить влияння горизонтальных ускорений гюдвюкного основания. На чертеже нредетавлеиа блок-схема предложенного устройства, содержащего кварцевое коромысло /, с нодвижными гребенками 2 и иенодвижными гребенками 3, образующими емкостной датчик, подвижными гребенками 4,4 и неподвижными 5,5, образующими устройство возвратного потенциала, эталонную емкость 6, коммутирующий блок 7, управляемый ге)1ератор 8, генератор имнульсов стандартной частоты 9, смеситель 10, блок 1} формирования импульсов, счетно-решающее устройство, состоящее из цифрового двоичиого счетчика 12, регистра нуль-отсчета 13, цифрового сумматора 14, регистра сигнала рассогласования 15, цифрового преобразователя 16, цифрового блока унравлення 17, регистрирующего устройства 18, устройства возвратного потенциала, состоящего из коммутирующего
блока J9, блока формирования импульсов 20, источника стабильного напряжеиия 21.
Гравиметр работает следующим образом.
Смещение коромысла / от исходного горизонтальното положения вследствие изменения силы тяжести и ускореиий приводит к изменению емкости датчика, образованного пластинами 2 и 3. Это приведет к изменению частоты управляемого генератора 8 в соответствии с перемещениями коромысла / чувствительной системы.
В смесителе 10 выделяется промежуточная частота, которая блоком 11 формирования импульсов 11 превращается в последовательность импульсов стандартнор формы и подается на цифровой двоичный счетчик 12. Далее обработка информации ведется нолностью в цифровой форме счетно-рещающим устройством гравиметра.
Для определения кода нуль-отсчета к контуру управляемого генератора 5 через коммутирующий блок 7 подсоединяется эталонная емкость 6, причем значение эталонной емкости 6 -соответствует величине емкости датчика при исходном горизонтальном положении коромысла. Значение частоты генератора 8 с эталонной емкостью 6 в контуре записывается в регистре нуль-отсчета 13.
В цифровом сумматоре 14 происходит сравнение кода нуль-отсчета с кодом цифрового счетчика 12 в данный момент времени и вычисляется сигнал рассогласования системы по положению коромысла / чувствительной системы.
Кроме того, в цифровом сумматоре 14 вычисляется сигнал рассогласования по скорости и ускорению перемещепня коромысла 1 чувствительной системы.
Суммарная ощибка по положению и его производным является полным сигналом рассогласования системы и в цифровой форме записывается в регистр сигнала рассогласования 15, откуда поступает на цифровой преобразователь 16, где превращается в последовательность стандартных имп)льсов, количество которых соответствует значению кода. Управляющее воздействие в виде пачки мощных импульсов подается через блок формирования импульсов 20 и коммутирующий блок 19, управляемый знаком сигнала рассогласования с регистра 15, подается либо на правые гребенки 4,5, либо па левые гребенки 4, 5 устройства возвратного потенциала и возвращает коромысло / чувствительной системы в исходное положение. Запись полного сигиала рассогласования, 1 также первой и второй производных положения рычага в цифровой форме является ннформацией, подлежащей дальпейщей обработке до получення относительиых значе|(1Й -силы тяжести.
Предмет изобретения
1.Цифровой автоматический гравиметр для измерения силы тялсести в движении, еодержащий упругую чувствительиую систему, рычаг
которой удер/кнвается в исходном положении системой обратной связи, генератор, управляемый чувствительной системой, блок формирования и: шульс-ов, генератор импульсов стандартной частоты, коммутирующий блок, счетио-рещающее устройство, источиик стабильного ианряжения, регистратор, отличающийся тем, что, с целью новыщения точности измерений, в нем чувствительная система выполнена в виде симметричного кварцевого коромысла с
гребенками, перемещающимися между аналогич 1ымн гребеиками, закрепленными неподвижно на корпусе так, что пара из них образует емкостной датчик, а остальные - устройство возвратного потенциала; дополнительно
установлены смеситель, соединеиный с генератором импульсов стандартной частоты и через блок формировапня импульсов со счетиорещающим устройством, и эталонная емкость, подключенная к коммутирующему блоку, связанному с управляемым генератором.
2.Цифровой автоматический гравиметр по п. 1, отличающийся тем, что счетно-рещающее устройство выполнено в виде связанных между собой цифрового двоичного счетчика и регистра нуль-отсчета, подключенных ко входу цифрового сумматора, .соединенного последовательно с регистром сигнала рассогласоваиия и цифровым преобразователем, и, в свою очередь, связа П ых с выходами цифрового блока
управления.
3.Цифровой автоматический гравиметр по пп. 1 и 2, отличающийся тем, что, устройство возвратного потепциала выполнено в виде коммутирующего блока, подключенного к неподвижным гребенкам чувствительной системы и связанного через блок формирования импульсов со счетно-решающим устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой автоматический гравиметр | 1980 |
|
SU934424A1 |
| Весоизмерительное устройство | 1988 |
|
SU1578497A1 |
| Следящий измеритель частоты | 1985 |
|
SU1298675A1 |
| Устройство для определения положения светового пятна на плоскости | 1972 |
|
SU447727A1 |
| Гравиметр | 1982 |
|
SU1121639A1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ КОРРЕКЦИИ КВАДРАТУРНЫХ ДЕМОДУЛЯТОРОВ | 2000 |
|
RU2187140C2 |
| СПОСОБ ПРОВЕРКИ МНОГООТСЧЕТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ВРЕМЕННЫХ ИНТЕРВАЛОВ В КОД | 2007 |
|
RU2349029C1 |
| Измеритель метеорологической дальности видимости | 1990 |
|
SU1784843A1 |
| Система цикловой синхронизации для многоканальных систем связи | 1988 |
|
SU1598193A1 |
| Устройство для контроля дефектности полупроводниковых пластин и структур | 1990 |
|
SU1785054A1 |