Известны электроконтактные датчики, содержащие измерительный стержень, с которым жестко связан нерегулируемый контакт, и регулируемые контакты. Последние устанавливаются в определенное положение винтовой передачей.
Предлагаемый датчик отличается от известных тем, что его регулируемые подпружиненные контакты выполнены плавающими в пределах измерения датчика и жестко фиксируемыми в любом промежуточном положении. Этот датчик легче настраивается но предельным эталонам, настройку в нем можно автоматизировать.
Для фиксации регулируемых контактов после настройки датчик снабжен консольио подвешенным на плоской пружине упором, воспринимающим усилие зажима от кулачка.
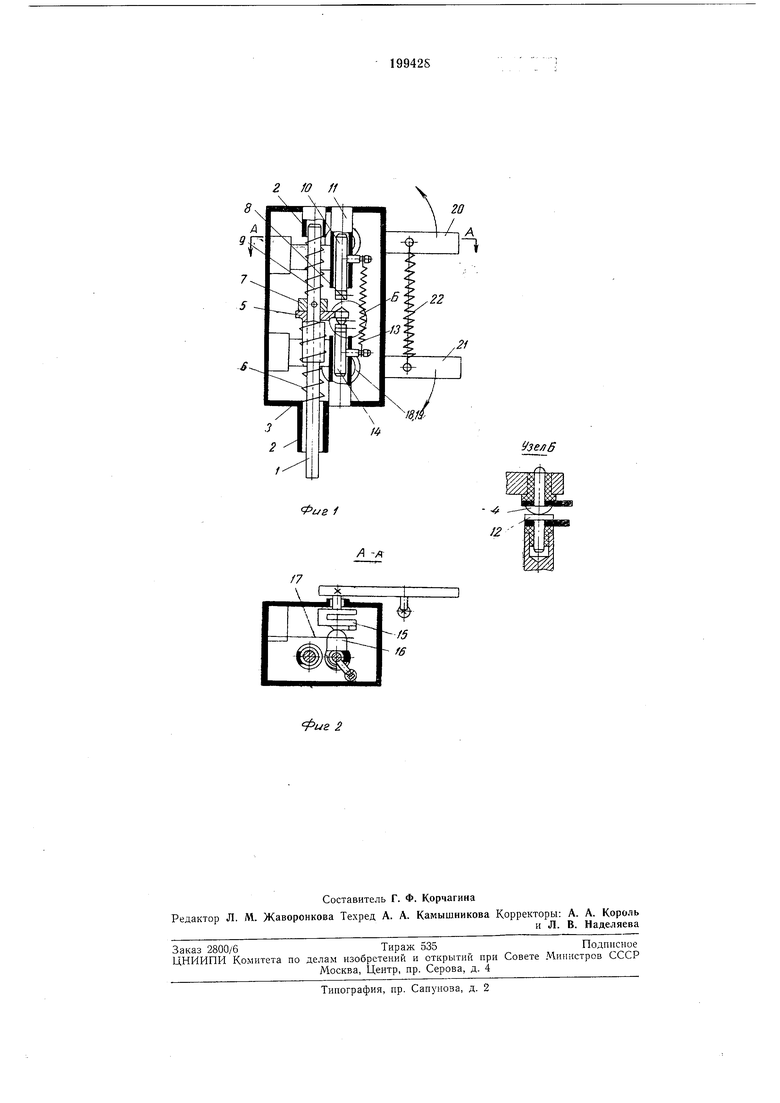
На фиг. 1 изображены описываемый датчик, продольный разрез, и узел Б; на фиг. 2 - разрез по А-А на фиг. 1.
Измерительный стержень / датчика находится в цилиндрических направляющих 2 в корпусе 3. Нерегулируемый (подвижной) контакт 4 через изоляционную втулку запрессоваи во фланец втулки 5, свободно сидящей на измерительном стержне (условно не указано ограничение от поворота втулки 5 на /стержне) . Пружина 6 постоядао прижимает втулку 5 к упору 7, закрепленному на стержне, и служит для обеспечения свободного хода стержня, так как при подъеме стержня на величину, большую установле П10го допуска на контролируемый размер, контакт 4 упирается в верхний регулируемый контакт 8, втулка 5, несущая контакт 4, останавливается и стержень проскальзывает вдоль оси. Пружина 9 создает измерительное усилие. Верхний регулируемый контакт запрессован через изоляционную втулку в цилиндрическом щтоке 10, плавающем в цилиндрической втулке 11, жестко закреиленной в корпусе датчика.
Аналогично верхнему устроен и нижиий регулируемый контакт 12.
Пружина 13 связывает штоки 10 и 14, несущие верхний и нижний регулируемые контакты, обеспечивает их неремещение в свободном состоянии к нерегулируемому контакту.
Для жесткой и точной фиксации контакта 8 служат кулачок 15, щарнирно закренленный в корпусе, и промежуточный унор 16, консольно закрепленный на плоской пружине 17 и иаходящийся в пазу втулки 11. Нижний регулируемый контакт фиксируется с помощью аналогичных кулачка 18 и упора 19. Рычаги 20 и 21 жестко связаны с кулачками 15 и 18 и служат для их поворота ири зажиме штоков, несущих контакты 8 н 12. Пружина 22 предназначена для предупреждения саморазворота кулачков 15 и 18. Работа электроконтактных датчиков нодробно описана в литературе, поэтому ниже рассматриваются только особенности настройки предлагаемого датчика. При установке на контрольной позиции предельного эталона «Брак по верхнему пределу измерительный стержень и связанный с ним нерегулируемый (подвижной) контакт занимают положение, определяемое верхней границей поля допуска проверяемого размера. Шток 10 с контактом 8, освобожденный от зажима кулачком 15 и упором 16 поворотом рычага 20 вверх, под действием пружины 13 прижимается контактом 8 к контакту 4, устанавливая контакт 8 в положении, заданном в конечном итоге эталоном. Затем шток 10 вместе с-контактом 8 жестко фиксируется в этом положении. В дальнейшем при пропуске через датчик изделий, имеющих проверяемый размер,- равный размеру эталона или больший его, по которому выставлялся контакт 8, контакт 4 будет касаться коитакта 8, замыкая электрическую цепь и указывая тем самым на изделие «Брак по верхнему пределу. Жесткая фиксация штока 10, а следовательно, и запрессованного в нем через изоляционную втулку контакта 8, осуществляется следующим образом. При повороте рычага 20 в положение, показанное на фиг. 1, кулачок 15, жестко связанный с рычагом, своим выступом давит на упор 16, закрепленный на свободном конце консольной плоской пружины 17, а упор, в свою очередь, прижимает шток 10 к внутренней цилиндрической поверхности втулки //. Аналогично настраивается и нижний контакт 12 по эталону «Брак по нижнему пределу. Предмет изобретен и-я 1.Электроконтактный датчик, содержащий измерительный стержень, нерегулируемый и регулируемые контакты, отличающийся тем, что, с целью облегчения настройки датчика по предельным эталонам и обеспечения возможности ее автоматизации, регулируемые поднружинеиные контакты выполнены плавающими в пределах измерепия датчика и жестко фиксируемыми в любом промежуточном положении. 2.Датчик по п. 1, отличающийся тем, что для фиксации регулируемых контактов после настройки он снабжен консольно подвещенным на плоской пружине упором, воспринимающим усилие зажима от кулачка.
2 Ю ff
фиг 2
20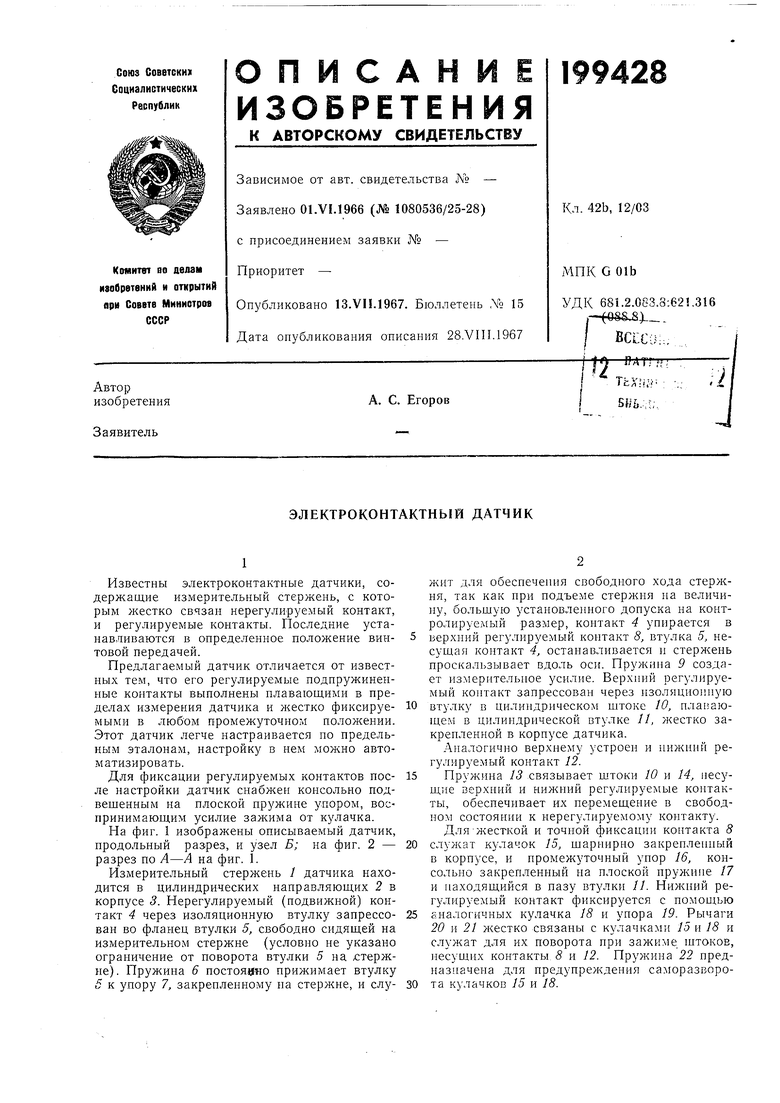
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля жесткости упругих элементов | 1971 |
|
SU499513A1 |
| Электроконтактный преобразователь для контрольно-сортировочных автоматических устройств | 1986 |
|
SU1405896A1 |
| Электроконтактный преобразователь для контрольно-сортировочных автоматических устройств | 1990 |
|
SU1787517A1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ПРУЖИНСЖАТИЯ | 1972 |
|
SU328320A1 |
| СТАНОК ДЛЯ РАЗВОДА ЗУБЬЕВ РДМНЫХ, ЛЕНТОЧНЫХ И ДИСКОВБ1Х ПИЛ ПО ДЕРЕВУ | 1964 |
|
SU164764A1 |
| АВТОМАТ КОНТРОЛЯ РАДИАЛЬНОГО ЗАЗОРА ПОДШИПНИКОВ | 1965 |
|
SU169805A1 |
| Электроконтактный датчик для определения характеристик упругих чувствительных элементов | 1979 |
|
SU855416A1 |
| Устройство для контроля формы поверхности объекта | 1989 |
|
SU1714322A1 |
| ДИЛАТОМЕТРИЧЕСКОЕ ТЕРМОРЕЛЕ | 1992 |
|
RU2082117C1 |
| Автоматическое устройство для контроля и сортировки колец | 1979 |
|
SU919764A1 |