Известные устройства для управления механизмом подачи режущих органов машин с приводом с экскаваторной механической характеристикой, имеющим электрическое звено, содержащие задатчик максимально допустимой скорости и датчик фактической пагрузки режущих органов, обладают тем недостатком, что при проходе мест без вырабатываемого массива скорость подачи автоматически возрастает до своей максимальной величины и соответственно увеличивается сила удара при последующем соприкосновении с массивом. Это может привести к недопустимым перегрузкам элементов кинематической цепи, поломке резцов и опрокидыванию двигателя. Этот недостаток усугубляется, если допустимое усилие подачи регулируется по загрузке режущих органов; в этом случае при проходе мест без вырабатываемого массива нагрузка режущих органов падает, увеличивается уставка допустимого усилия подачи и скорость подачи нарастает более интенсивно.
С целью исключить этот недостаток в предложенном устройстве в задатчике максимально допустимой скорости использованы источник эталонного сигнала, соответствующего работе режущих органов вхолостую, и изменяющий интенсивность выходного сигнала усилительный элемент, к входу которого подсоединены встречно включенные между собой датчик фактической Н1агруз1ки и }чпаМ:Я1Н(у|ТЫй источник эталонного сигнала.
Воэмюжно вьшоьЛмение предложенного yiCTройстыа с при1соеди Н1вни1е1м выхода переключателя вида управления к выходу усилительного элемента или к источнику эталонного сигнала, соответствующего работе режущих органов вхолостую. Это обеспечивает снятие ограничения скорости при дистанционном управлении оператором (вручную).
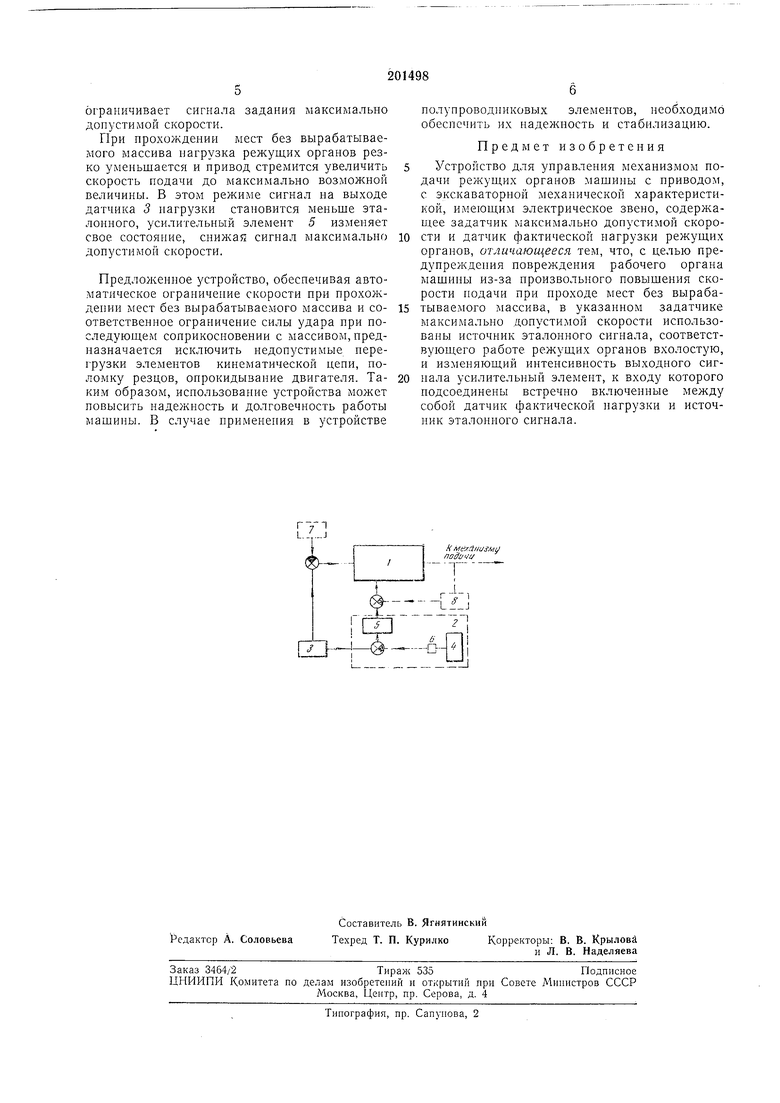
На чертеже дана принципиальная схема устройства.
Основными узлами устройства являются: индивидуальный привод / с экскаваторной механической характеристикой, имеющий электрическое звено, задатчик максимально допустимой скорости 2, датчик 5 фактической нагрузки режущих органов источника 4 эталонного сигнала, соответствующего работе режущих
органов вхолостую, усилительный элемент 5. Устройство может содержать переключатель 6 вида управления, источник 7 опорного сигнала, пропорционального заданной нагрузке, и датчик скорости 8.
Привод / с экскаваторной механической характеристикой обеспечивает примерно постоянное усилие подачи при скоростях подачи ниже заданной максимальной величины. Это в значительной мере стабилизирует загрузку мащиподачи ее скорость уменьшается при возрастании крепости разрабатываемого массива и увеличивается при крепости массива.
Кроме того, экскаваторная механическая характеристика обеспечивает защиту механизма от перегрузок без отключения привода. В качестве привода с экскаваторной механической характеристикой, имеющего электрическое звено, могут быть использованы, например, привод с электромагнитной муфтой скольжения, система генератор-двигатель (в частности, с трехобмоточным генератором) и др. При этом в приводе с муфтой к первичному двигателю присоедипяется входной вал муфты, а в системе генератор-двигатель - вал генератора; к механизму подсоединяется соответствепыо выходной вал муфты или вал рабочего двигателя.
Задатчик 2 максимально допустимой скорости предусматривается для ограиичепия скорости подачи при малых сопротивлениях подаче (например, при маневровом ходе). В качестве задатчика используется источник регулируемого сигпала (например, с применепием потенциометра). Выход задатчика присоединен с электрическому звену привода подачи: в системе генератор-двигатель к облмотке возбуждения генератора, в приводе с электромагнитной муфтой скольжения - к одному пз входов усилителя в цепи обмотки возбуждения муфты.
Датчик о фактической нагрузки обеспечивает на выходе сигнал, зависящий от нагрузки режущих органов. В качестве датчика фактической нагрузки используется, папример, измеритель тока в цепи приводного электродвигателя режущих органов, измерители иотребляемой мощности этого двигателя, его полезной мощности, момента на валу, скольнсения.
Источник 4 предназначен для подачи в схему сравнения эталонного сигнала, соответствующего работе режущих органов вхолостую.
Усилительный элемент 5, включаемый в цепь сигнала, задающего максимально допустимую скорость, обеспечивает уменьшение величины сигнала при снижении нагрузки режущих органов нилсе установлеппой величины (соответствующей работе режущих органов вхолостую). При этом уменьщение величины сигнала достигается известными приемами, например путем увеличения электросопротивления в цепи сигнала, либо путем частичного шунтирования источника сигпала. Предлагается использовать в качестве усилительного элемента как релейный, так и перелейный, как бесконтактный (например, магнитный или транзисторный), так и контактный.
К входу усилительного элемента присоединены полярностью встречно датчик 5 и источник 4. Сравнение сигналов на входе усилительного элемента может бьпь осуществлено любым способом, нанример электрическим, магнитным. Чтобы обеспечить изменение выходного сигнала усилительного элемента лпщь при отклонениях на входе одного зпака отпосительно установленной величины, при электрическом сравнении сигналов выходы датчика 3 и источника 4 соединены через вентиль; магнитное же сравнение сигпалов осуществляется па элементе с резко различной интенспвиостью выходного сигнала в зависимости от полярности результирующего входного сигпала (например, на магнитном усилителе с положительной обратной связью по току в рабочей обмотке).
Переключатель 6 вида управления (автоматическое или ручное) может быть иснользован в устройстве для снятия ограничения скорости прп ручном управлении. Пеобходимость в этом возникает, например, при маневровом
ходе машины, когда сопротивление подаче меньше, чем прп рабочем ходе, а нагрузка режущих органов значптельно пиже номинальной (как и при проходе мест без вырабатываемого массива), но ограпичепие скорости не
требуется. Чтобы исключить изменение сигнала задания максимально допустимой скорости при ручном управлении, выход переключателя 6 может быть присоединен к выходу усилительного элемента 5, либо к источнику 4 эталонного сигнала, соответствующего работе режущих органов вхолостую. Например, в показанном на чертеже варианте присоединения выход переключателя при ручном управлении замкнут, тем самым источпик эталопного сигнала защунтирован и исключено автоматическое изменение сигнала задания максимально допустилюй скорости.
Источник 7 онорного сигнала, пропорционального заданной нагрузке, используется,
если предусматривается стабилизация загрузки машины. Тогда к электрическому звену привода нодачи подключена также схема сравнения заданной п фактической нагрузки режущих оргаиов. Ири сигпале о недостаточном использовании привод повышает усилие подачи мащины; при сигнале противопололшого знака - снижает усилие подачи, в результате обеспечивая повышение производительности мащпны за счет более полпого использования
мощности нриводного двигателя.
Датчик 8 скорости подачи предусмотреп для поддержания требуемых скоростей подачи прп усилиях подачи, меньших заданного, что необходимо для осуществления маневрового хода,
и для возмолсности ограничения скорости прп проходе мест, где отсутствует вырабатываемый массив. Датчик предусматривается в тех случаях, когда привод подачи не обладает естественными л есткими механическими характеристпками на промежуточных скоростях и для получепня жестких характеристик необходима обратная связь по скорости. Выход датчика 8 присоединяется к входу электрического звена привода подачи / встречно задатчику максимально допустимой скорости.
ограничивает сигнала задания максимально допустимой скорости.
При прохождении мест без вырабатываемого массива нагрузка режущих органов резко уменьшается и привод стремится увеличить скорость подачи до максимально возможной величины. В этом режиме сигнал на выходе датчика 3 нагрузки становится меньше эталонного, усилительный элемент 5 изменяет свое состояние, снижая сигнал максимально допустимой скорости.
Предложенное устройство, обеснечивая автоматическое ограничение скорости при прохождении мест без вырабатываемого массива и соответственное ограничение силы удара при последующем соприкосновении с массивом, предназначается исключить недопустимые нерегрузки элементов кинематической цени, ноломку резцов, опрокидывапие двигателя. Таким образом, использование устройства может повысить надежность и долговечность работы машины. В случае применения в устройстве
полупроводниковых элементов, необходимо обеспечить их надежность и стабилизацию.
Предмет изобретения
Устройство для управления механизмом подачи режущих органов машины с приводом, с экскаваторной механической характеристикой, имеющим электрическое звено, содержащее задатчик максимально допустимой скорости н датчик фактической нагрузки режущих органов, отличающееся тем, что, с целью предупреждения повреждения рабочего органа машины из-за нроизвольного повышения скорости подачи при проходе мест без вырабатываемого массива, в указанном задатчике максимально допустимой скорости использованы источник эталонного сигнала, соответствующего работе режущих органов вхолостую, и изменяющий интенсивность выходного сигнала усилительный элемент, к входу которого подсоединены встречно включенные между собой датчик фактической нагрузки и источник эталонного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАГРУЗКОЙ ГЛАВНОГО ДВИГАТЕЛЯ ВРУБОВО-КОМБАЙНО-ВЫХ МАШИН | 1966 |
|
SU188546A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ РЕЖУЩИХ ОРГАНОВ ДОБЫЧНЫХ И ПРОХОДЧЕСКИХ МАШИН | 1967 |
|
SU197727A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ НАГРУЗКИ ГЛАВНОГО ДВИГАТЕЛЯ | 1966 |
|
SU185378A1 |
| Способ управления горной машиной и устройство для его осуществления | 1981 |
|
SU972092A1 |
| ГАЗОВЫЙ ЗАДАТЧИК ДАВЛЕНИЯ | 2000 |
|
RU2246101C2 |
| Способ регулирования эксплуатационных характеристик двигателя внутреннего сгорания и устройство для его осуществления | 1975 |
|
SU1061702A3 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| Способ управления горной машиной и устройство для его осуществления | 1983 |
|
SU1105640A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
,4 Mejr i/aiMiJ noduiij
