Известны устройства для контроля силы натяжения канатов, например, шахтной подъемной установки, содержащие корпуса подшипников копровых шкивов контролируемой установки, магнитоупругие датчики и исполнительный релейный блок, состояш,ий из реле, выпрямительных мостов, конденсаторов, диодов и сопротивлений.
Описываемое устройство отличается от известных тем, что, с целью упрощения конструкции, увеличения мощности выходных сигналов, обеснечения надежности и стабильности работы, магнитоунругие датчики в нем, выходные сигналы которых поступают в исполнительный релейный блок, установлены посредством подвижиых втулок с выступом под вкладыши или обоймы подшипниковых копровых шкивов, воспринимающих нагрузку, передаваемую канатом контролируемой установки.
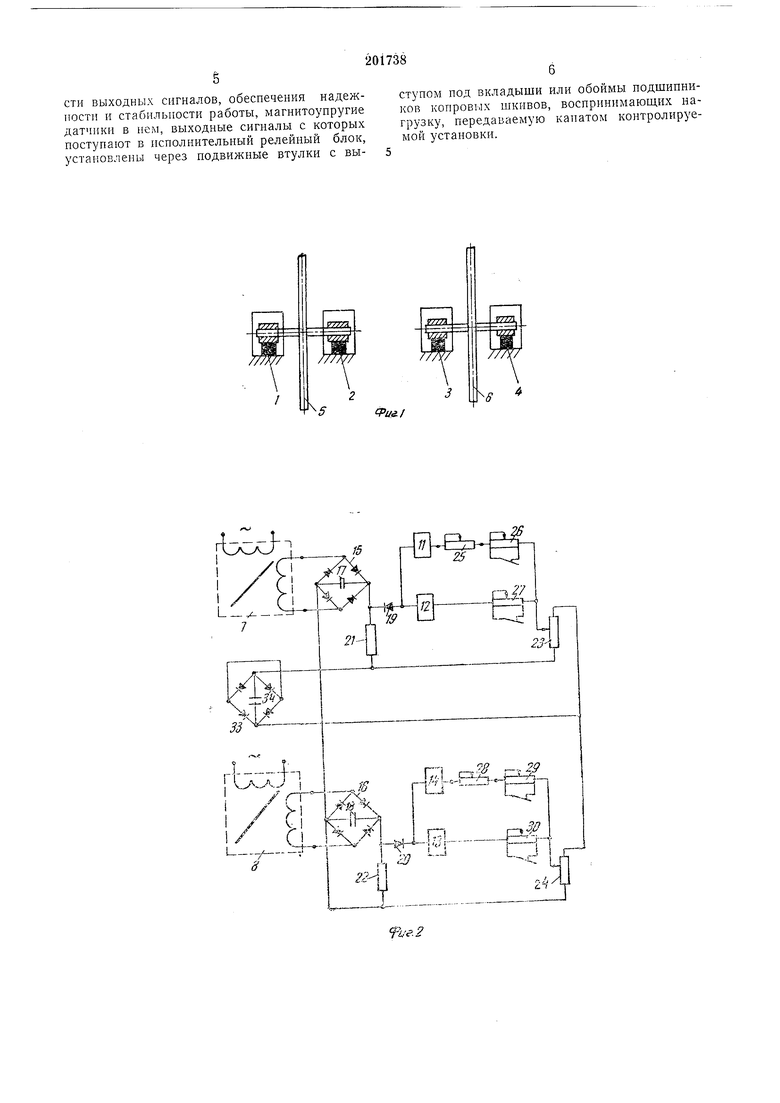
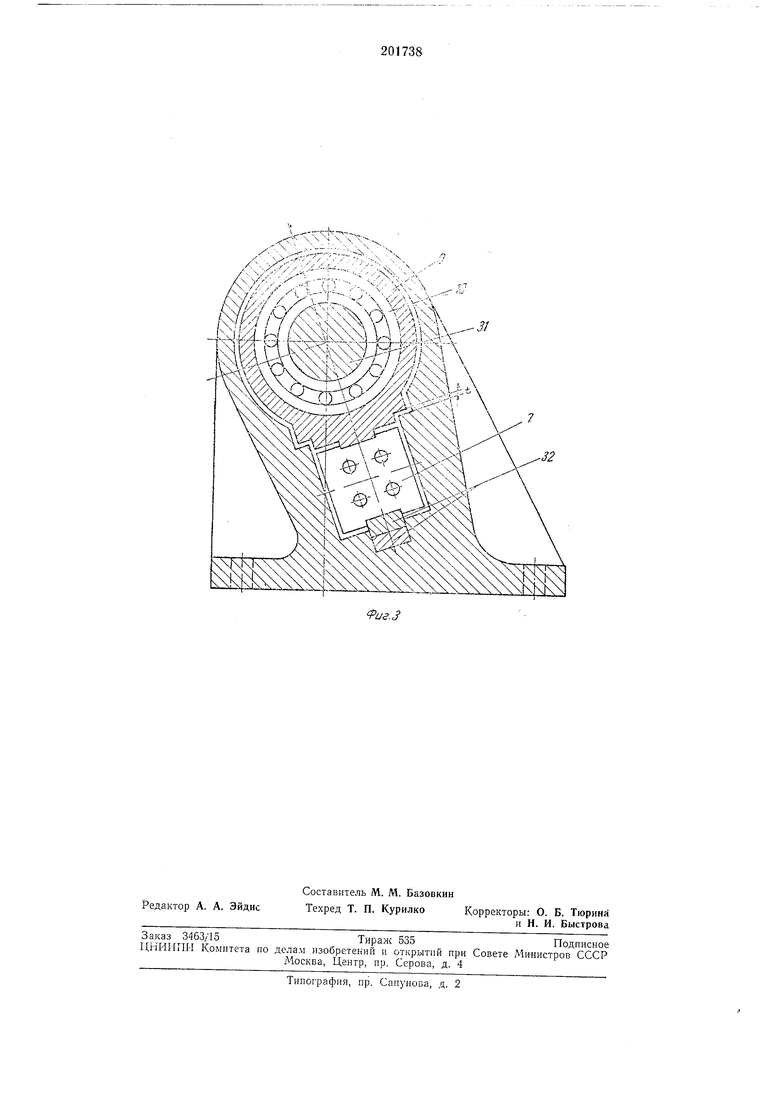
На фиг. 1 показана схема расположения магнитоупругих датчиков в контролируемой установке; на фиг. 2 - принципиальная схема регистрирующей части устройства; на фиг. 3 - конструкция подшипника копрового шкива с встроенным магнитоупругим датчиком.
фиг. не показана); магнитоупругие датчики 7 и 8, установленные посредством подвижных втулок 9 с выступом под обоймы 10 подшипников копровых шкивов шахтной подъемной установки; исполнительный релейный блок (только для одного шкива). Релейный блок состоит из реле //, 12, 13 и 14, управляющих ослаблением каната при зависании скипа, разгрузкой и загрузкой скипа и перегрузом каната; выпрямительных мостов 15, 16, конденсаторов 17, 18, диодов 19, 20 и сопротивлений 21-30.
Корпуса подшипников служат для крепления к нодшкивным балкам и монтажа всех
остальных узлов и деталей. В подвил ную втулку 9 запрессовывается наружная обойма 10 подшипника вала 31 шкива 5. Подвижная втулка 9 имеет возможность некоторого перемещения внутри корпуса вдоль оси А-А. Втулка 9 имеет выступ, которым она опирается на магнитоупругий весоизмерительный датчик 7 и передает на него усилие, воспринимаемое от вала 31. Датчик расположен таким образом, что направление, по которому он должен воспринимать нагрузку, совпадает с направлением возможного перемещения подвижной втулки подшипника, т. е. с осью Л-А. В свою очередь, ось А-А расположена иод некоторым
она как можно ближе совпадала с направлением равнодействующей составляющих усилий от натял ения каната.
Небольшое возможное рассогласование между направлениями равнодействующей силы и оси А-А практически не сказывается на работе датчика.
Весоизмерительный датчик 7 рассчитан таким образом, что он может надежно регистрировать изменение нагрузки на канат в пределах от минимально допустимой (зависание порожнего сосуда в верхней точке) до максимально допустимой (приблизительно 1,5 максимальной статической нагрузки на канат).
Допустимая нагрузка на датчик превышает величину равнодействующей силы при максимально допустимом натяжении каната, при котором срабатывает защита от перегруза.
Для того чтобы исключить возможность выхода датчика из строя при значительном увеличении натяжения каната, между подвижной втулкой и неподвижной частью подшипника имеется зазор t. Величина зазора устанавливается при монтаже датчика с таким расчетом, что он полностью выбирается за счет упругой деформации датчика при достижении канатом максимально допустимого натяжения, и дальнейшее увеличение нагрузки воспринимается непосредственно корпусом подшипника без передачи на датчик. Малая величина зазора t, составляющая доли миллиметра, позволяет производить демонтаж датчика при сохранении работоспособности самого корпуса подшипника, т. к. изменение положения шкива при демонтаже датчика не превысит допустимые пределы.
Регулировка величины зазора t производится с помощью клиньев 32.
Принцип действия описываемого устройства основан на измерении усилий реакций в опорах подшипников копровых шкивов с помощью магнитоупругих датчиков трансформаторного типа. Усилия, передаваемые на датчик, пропорциональны величине натяжения каната. С помощью магнитоупругого датчика усилие натяжения каната преобразуется в переменный ток определенной величины.
Схемой предусматривается получение выходных сигналов при различных значениях усилия натяжения (загрузка, разгрузка, зависание скипа и перегруз каната) в каждом из двух подъемных канатов (левом и правом).
При наличии этих усилий устройство выдает соответствующее выходные сигналы в схему управления подъемной установкой. Это осуществляется соответствующими исполнительными реле исполнительного релейного блока. С исполнительного релейного блока в схему управления подъемной установкой может быть подано четыре различных сигнала: «Скип разгружен, «Скип загружен, «Скип завис и «Перегруз каната.
та шкива). Принципиальная схема работы устройства приведена на фиг. 2.
Работа схемы основана на принципе сравнения напряжений, поступающих со стороны 5 вторичной обмотки магнитоупругого датчика и со стороны независимого источника питания. В цепь сравнения включены чувствительные реле, настраиваемые на включение и реагирующие сигналы, поступающие от дат0 чиков. Питание на первичные обмотки магнитоупругих датчиков 7 и S подается от трансформатора (на схеме не показан).
Для обеспечения стабильной работы схемы предусмотрен стабилизатор напряжения (на 5 схеме не показан).
Напряжения постоянного тока подаются на сопротивления 21 и 22 от вторичных обмоток датчиков 7 и 5 через выпрямительные мосты 15 и 16. На потенциометры 23 и 24 подаются 0 напряжения постоянного тока от понижающего трансформатора через выпрямительный мост 33 с конденсатором 34.
Напряжения на сопротивлениях 21 н 22 я в потенциометрах 23 и 24 соответственно 5 включены встречно.
В одну из цепей сравнения напряжений попарно включены реле 11 и 12, в другую - реле 13 и 14.
Реле 12 и // настраиваются на включение 0 при определенной разнице напряжений на сопротивлениях, при условии превышения величины напряжения потенциометра 23.
Реле 13 и 14 настраиваются на включение также при определенной разнице напряжений, 5 но при превышении величины напряжения датчика 8, для чего в цепь сравнения включен диод 20.
С помощью сопротивлений 25 и 28, соответственно, реле // и 14 настраиваются на вклю0 чение при разнице напряжений большей, чем разница напряжений, при которой включается реле 12 и 13.
Настройка на отключение реле //, 12, 13 и 14 осуществляется соответственно сопротив5 лениями 26, 27, 29, 30.
Каждый из датчиков выполняет определенные функции. Датчик 7 осуществляет контроль разгрузки скипа и защиту от ослабления каната при зависании скина, датчик 8 0 осуществляет контроль загрузки скипа и защиту от перегруза каната.
С этой целью в цепи сравнения включены селеновые диоды 19 и 20.
Предмет изобретения
Устройство для контроля силы натяжения канатов, например, шахтной подъемной установки, содержащее корпуса подшипников
копровых щкивов контролируемой установки, магнитоупругие датчики и исполнительный релейный блок, состоящий из реле, выпрямительных мостов, конденсаторов, диодов и сопротивлений, отличающееся тем, что с целью
сти выходных сигналов, обеспечения надежпостн и стабильности работы, магнитоупругие датчики в нем, выходные сигналы с которых поступают в исполнительный релейный блок, установлены через подвижные втулки с выступом под вкладыши или обоймы подшипников копровых шкивов, воспринимаюидих нагрузку, передаваемую канатом контролируемой установки.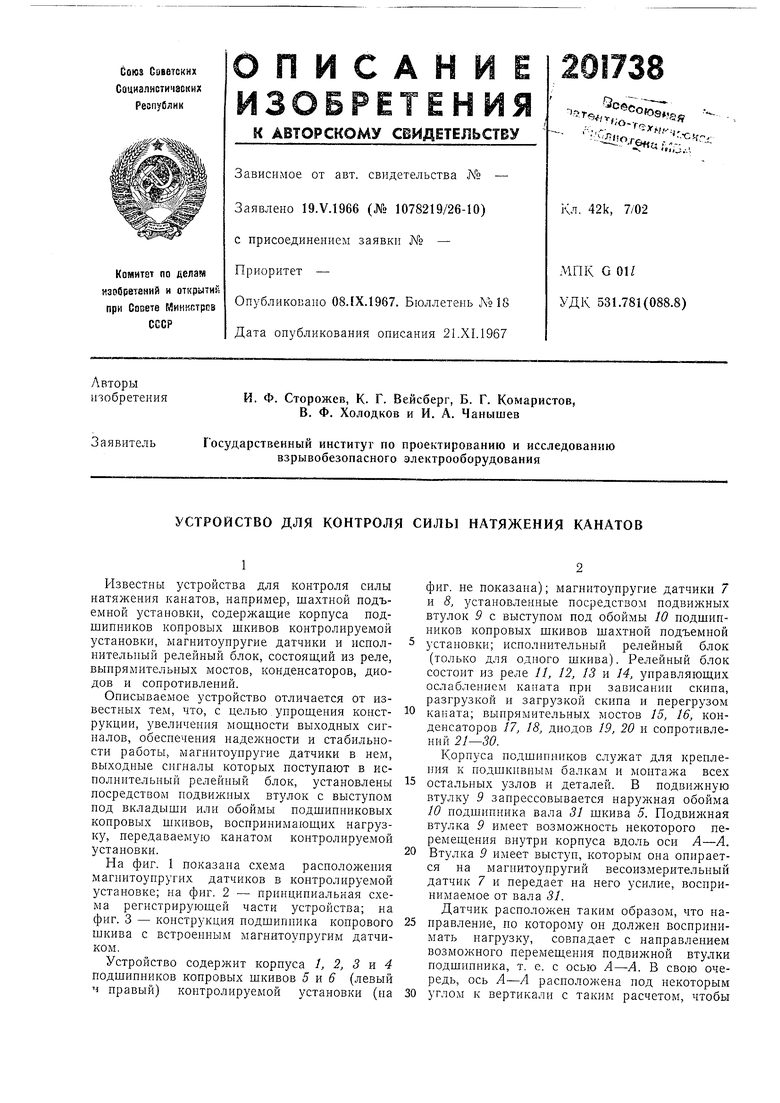

| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат защиты шахтных подъемных установок от провисания канатов | 1960 |
|
SU144267A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ПОЛЕЗНОГО ГРУЗА В ПОДЪЕМНОМ СОСУДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2124468C1 |
| Аппарат защиты шахтных подъемных установок от напуска каната | 1990 |
|
SU1804448A3 |
| Устройство защиты от напуска каната при застревании подъемного сосуда в стволе | 1979 |
|
SU861266A1 |
| Система обнаружения застревания сосуда в стволе шахты | 1977 |
|
SU765176A1 |
| Устройство для защиты шахтной подъемной установки от напуска каната | 1975 |
|
SU753765A1 |
| Устройство для автоматического останова шахтной подъемной машины | 1961 |
|
SU140970A1 |
| Шахтная многоканатная фрикционная подъемная установка с наземным расположением машины | 1988 |
|
SU1643398A1 |
| Устройство контроля зависания сосуда в стволе подъемной установки | 1974 |
|
SU608740A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАПУСКА КАНАТА | 1990 |
|
RU2022903C1 |
32
