Известны способы автоматического управления режимами гидромонитора основанные на поддержании заданного расстояния от гидромонитора до забоя.
Предложенный способ отличается от известного тем, что измеряют угол между направлением движения гидромонитора и направлением полета струи сельсин-датчиком и по величине его сигнала определяют оптимальное значение напора струи. Это позволяет повысить производительность гидромонитора.
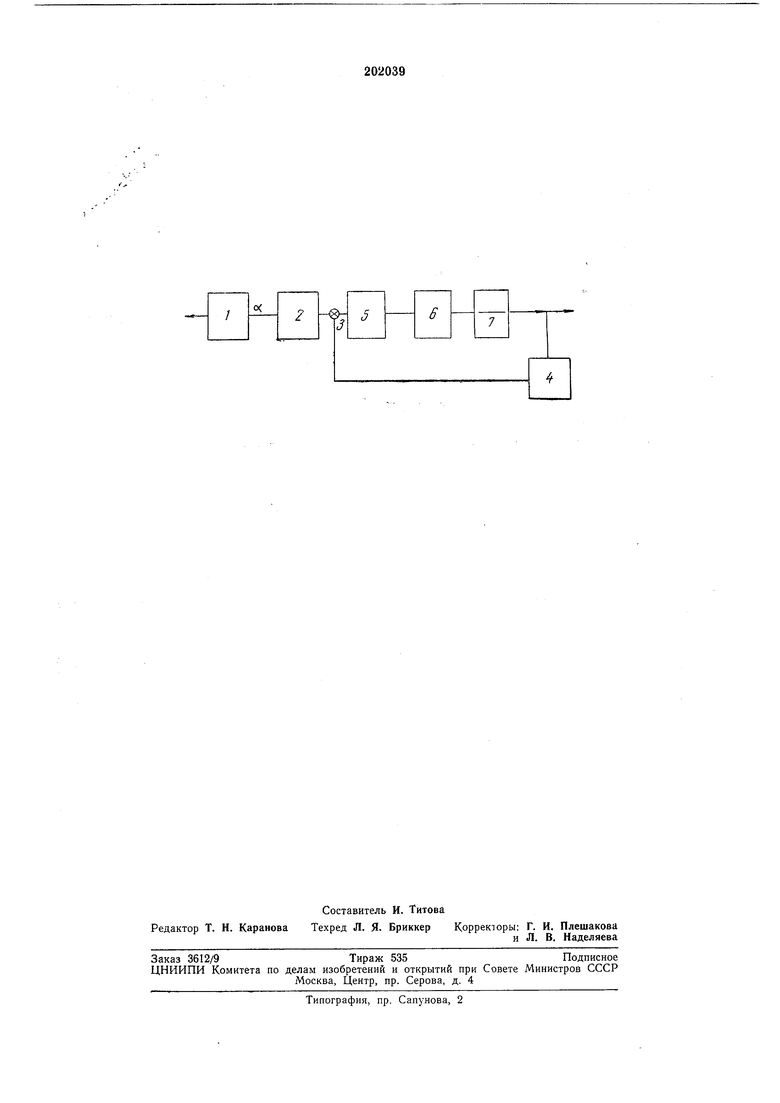
Па чертеи е изображена блок-схема устройства для асуществления предложенного способа.
Угол между направлением движения гидромонитора и полета струи определяют сельсиндатчиком 1, .сигнал с которого вводится в вычислительное устройство 2, где производится поиск расстояния от гидро.монитора до забоя и соответствующее ему оптимальное .значение напора струи с учетом физико-механических свойств размываемой породы. Зависимость оптимальных значений напора струи от расстояния гидромонитора до забоя определяется на
основе экспериментальных и теоретических исследований, а расстояния от угла а - на основе тригонометрических формул.
Сигнал с вычислительного устройства подается в сравнивающее устройство 3, куда поступает также сигнал с измерительного устройства 4. С выхода сравнивающего устройства сигнал поступает на управляемый ртутный вентиль 5, который изменяет режим работы двигателя 6 объекта управления 7 так, чтобы значение .напора на насадке гидромонитора было оптимальным.
Предмет изобретения
Способ автоматического управления режимами работы гидромонитора, основанный на поддержании заданного расстояния от гидромонитора до забоя, отличающийся тем, что с целью повыщения эффективности разрущения
пород, измеряют угол между направлением движения гидромонитора и направлением полета струи сельсин-датчиком, по величине сигнала которого определяют оптимальное значение напора струи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления гидромонитором | 1983 |
|
SU1086156A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Устройство для дозирования жидкости | 1987 |
|
SU1522164A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДКЕ | 2018 |
|
RU2708785C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ЗАМЕРА РАССТОЯНИЙ ОТ ГИДРОМОНИТОРА ДО ЗАБОЯ | 1970 |
|
SU286915A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
| АЭРОМЕХАНИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СОСТОЯНИЯ ВЕРТОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352914C1 |
| СПОСОБ ДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2421746C1 |
| Самонаводящаяся электроракета | 2018 |
|
RU2686550C1 |