Изобретение относится к области измерительной техники и может найти применение, в частности, для измерения параметров состояния вертолета в полете: продольной Vx и поперечной Vz скоростей полета; тяги T несущего винта в полете; веса G (массы m) вертолета в полете (на взлете); угла атаки α (коэффициента подъемной силы Су) сечения лопасти несущего винта вертолета.
Известны аэродинамический способ измерения воздушных сигналов, в частности угла атаки α, угла скольжения β, и соответствующая система воздушных сигналов (СВС) для его осуществления.
Такой способ и устройства для его осуществления наиболее распространены в гражданской авиации. Сущность аэродинамического способа заключается в том, что измеряется разность давления, равная
где Рп - полное давление в точке, где скорость падает до нуля, Рст - статическое давление, V - скорость самолета, q - скоростной напор, ρ - плотность воздушного потока.
Основным недостатком такого способа и его реализации является низкая точность измерения, особенно при маневрах вертолета и других динамических процессах, а также относительно высокая стоимость реализации данного способа, см. "Авиационные приборы и измерительные системы" (под редакцией Воробьева В.Г.) - М.: Транспорт, 1981 г. - 391 стр. "Измерители скорости полета, угла атаки, скольжения, комплексные измерители высокоскоростных параметров", стр.166-213.
Заметим, что для целей пилотирования и работы системы обеспечения оптимальности и безопасности полета требуемая точность измерения аэродинамических углов составляет 0.4÷0.5° в диапазоне изменения до 50°, тогда как для решения прицельных задач имеем соответственно 0.1÷2° в диапазоне 0÷60°. Существующие флюгерные преобразователи аэродинамических углов обладают инструментальной погрешностью 0,4÷2°, а некоторые зарубежные фирмы довели эту величину до 0,1÷0,25°.
Флюгер на передней кромке крыла работает по схеме "включено - выключено". Имеются модификации этого устройства, выходной сигнал которых пропорционален углу атаки, но они очень дорогие. Всем этим приборам свойственно прямое измерение угла атаки, связанное с измерением поля аэродинамических сил и моментов на поверхности флюгера и компенсацией погрешностей при изменении режима полета (скорости полета, угла скольжения, положения механизации и т.д.).
Флюгерные преобразователи обладают небольшой чувствительностью, что ограничивает нижний предел их применения по скорости полета до 150-250 км/час. Кроме того, недостаточная надежность, связанная с возникновением резонансных явлений при колебаниях ЛА, приводит к значительным динамическим погрешностям. Указанные возможности и потребные возможности аэромеханических систем рассмотрены в работах:
Андерсен Дж., Кайтен М. Система сбора, обработки и выдачи воздушных (аэродинамических) данных. - В кн.: Самолетные навигационные системы. - М.: 1973, - с.360-377.
Горлин С.М., Слизингер И.И. Аэромеханические измерения. Методы и приборы. - М.: Наука, 1964, - 720 с.
Преобразователи классической схемы (перепад давления - перемещение - электрический сигнал) с емкостным, индуктивным и тензометрическим выходами могут эффективно использоваться на ЛА для значений перепадов давления ΔР от 0.2÷1 мм вод.ст. и выше. При меньшем значении ΔР возникают недопустимые погрешности, обусловленные температурой, вибрациями, перегрузкой, а также гистерезисными явлениями. Все это ограничивает нижний предел по скорости полета до 100÷150 км/ч. Установленный на самолете Galfstrem преобразователь модели 7100 фирмы United Control (США) с цилиндрическим насадком и индуктивным нуль-органом с порогом реагирования ~2 Па обеспечивает инструментальную погрешность ±(0.3°÷0.1°) во всем диапазоне скоростей 110÷150 км/ч.
Наиболее близким способом измерения воздушно-скоростных параметров траектории полета является способ измерения аэродинамических углов с помощью бесфлюгерных измерителей, основанный на измерении и обработке сигналов с датчиков перепада давления, размещенных на искусственно введенных поверхностях на фюзеляже самолета: цилиндр, сфера, полусфера, конус, обтекаемые набегающим потоком воздуха при полете.
Основным недостатком такого способа и систем его реализации является ограниченный объем информации о параметрах траектории движения вертолета (угол атаки, угол скольжения), а также необходимость вводить поправки для компенсации методических погрешностей, обусловленных влиянием поля аэродинамического давления вертолета.
Предотвращение срыва потока, имеющего место на лопастях вертолета, является актуальной задачей. Это обусловлено требованиями маневренности и желанием эксплуатирующих организаций перевозить грузы максимально допустимого веса.
Парирование порывов ветра в данной системе осуществляется не за счет сигналов отклонения от траектории, а за счет сигналов об изменении сил давления, когда еще нет отклонений ЛА. При этом датчики перепадов давления размещаются на крыле и хвостовом оперении на одном и том же расстоянии по хорде. В результате датчик на правом крыле будет контролировать положение правого элерона, в то время как датчик на левом крыле будет контролировать положение левого элерона. Элеронам будут предписываться отклонения независимо друг от друга, поэтому для того, чтобы компенсировать несимметричный порыв ветра, изменятся величина давления, результирующая подъемная сила и момент крена. Руль высоты и руль направления будут сохранять моменты тангажа и рыскания в равновесии.
Предупреждение срыва достигается применением датчиков перепада давления, подобных датчикам, рассмотренным для угла атаки α. Ограничивая перепад давления, мы воздействуем на α и предотвращаем срыв при любом весе самолета, а также срыв в динамическом режиме полета.
Следующим потребителем информации о поле аэродинамических сил является вертолет. Рассмотрим это направление на примере активной системы устранения срывного флаттера лопасти. Предотвращение срыва потока, имеющего место на лопастях вертолета, является актуальной задачей. Это обусловлено требованиями маневренности и желанием эксплуатирующих организаций перевозить грузы максимально допустимого веса. В ходе исследований, начатых в 1970 году и осуществляемых в течение нескольких лет в рамках контрактов французского правительства, основной упор делается на активную систему устранения срывного флаттера лопастей. В этих работах для активного управления срывом лопастей используется информация о поле сил аэродинамического давления для формирования сигнала управления углом тангажа таким образом, чтобы не происходил срыв потока. С этой целью строится следящая система для управления распределением давления на лопастях.
К настоящему времени проведен определенный объем исследований по разработке компенсационного алгоритма измерения статического давления Рст, динамического давления Рдин, угла атаки α. При этом строилась модель погрешностей, обусловленных влиянием возмущений, вносимых ЛА. Работы проводились в Летно-исследовательском институте.
Перспективные измерительные системы должны включать в себя вычислители воздушных параметров, работающие с более высокой точностью.
Подобная система рассмотрена в работе: Активная система устранения срывного флаттера лопастей. Active elimination of stall conditions. Kretx Marcel, "Oertica", 1982, 6, №1, 49-58 стр.
Как показывают эксперименты, комбинация срывного и вихревого противодействий, приводящая к внезапному повышению давления подсасывания на передней кромке, имеет место, когда лопасть находится в четвертом квадранте, т.е. при ψ=270°÷360°. При этом давление на передней кромке особенно чувствительно к срыву, следовательно, подходит для распознавания условий, близких к срывным. Чтобы исследовать проблему количественно, предпочтительнее иметь дело с коэффициентом давления Ср, чем с абсолютным давлением. В таком подходе предотвращение срыва решается путем ограничения величины Ср.
Когда величина Срмах начала срыва известна, тогда ее можно использовать в качестве сигнала рассогласования для того, чтобы избежать отрыв потока на аэродинамической поверхности. При этом необходимо вводить цепь с обратной связью, в которой используется информация о величине Ср, а также силовой привод для обеспечения условия Ср<Сpmax.
Таким образом, использование информации о перепаде давления, измеренного в характерных точках на поверхности ЛА, является перспективным. Такая информация в измерительных системах используется давно: Горлин С.М., Слизингер И.И. Аэромеханическое измерение. Методы и приборы. - М.: Наука, 1964. - 720 с.
Однако в известных системах она применяется для измерения невозмущенного потока, в том числе с помощью приемников воздушного давления (давления торможения и статического давления), что не полностью характеризует состояние конкретного ЛА, а определяет лишь собственно движение его как материальной точки. Исследование таких систем проведено в монографии, в которой указывается на недостаточную точность функционирования таких измерительных систем при больших значениях углов атаки и скольжения, что приводит к нарушению адекватности между состоянием ЛА и его информационной моделью.
Целью предлагаемого изобретения является расширение функциональных возможностей, повышение точности измерения. Цель достигается тем, что измерение перепада давления осуществляется непосредственно на одной из лопастей несущего винта вертолета в трех специально выбранных точках на хорде профиля на некотором (заранее выбранном) расстоянии от оси вращения, которые обеспечиваются авторским способом по выбору места расположения датчиков перепада давления. Полученная с датчиков перепада давления информация обрабатывается, согласно полученным автором формульным соотношениям, обеспечивая получение искомых параметров состояния вертолета.
Предлагаемый способ и устройство его реализации реализовано и испытано на вертолете Ми-8. Получены положительные результаты и рекомендации для серийного внедрения в ОКБ им. Миля.
По сигналам датчиков перепада давления, размещенных на этих поверхностях, эти сигналы обрабатываются по рассчитанным автором математическим функциональным зависимостям, по которым и определяются искомые параметры состояния вертолета при полете.
На фиг.1 представлена блок-схема устройства, реализующего предлагаемый способ аэромеханического измерения параметров полета.
На фиг.2 - место размещения датчиков перепада давления на лопасти несущего винта вертолета.
На фиг.3 - место размещения датчиков перепада давления в сечении АВ лопасти несущего винта.
Функциональная схема устройства, реализующего предлагаемый способ, содержит блоки и связи между ними:
1, 2, 3 - датчики перепадов давления;
9, 12, 20 - датчики частоты вращения несущего винта, плотности воздуха за бортом вертолета, датчик амплитудного положения лопасти, соответственно;
4, 5, 6, 8, 10, 11, 14, 16, 17, 18, 19, 21, 22, 23, 24 - функциональные преобразователи;
7, 15, 18А, 25 - указатели скоростей, тяги, угла атаки сечения лопасти, веса (массы) вертолета, соответственно.
В предлагаемом аэромеханическом способе измерение воздушного давления производят непосредственно в виде разности давлений на верхней и нижней поверхностях лопасти несущего винта, в специально выбранных точках, согласно конструктивно-аэродинамическим свойствам поверхности лопасти несущего винта вертолета.
Реализуется предлагаемый способ следующим образом.
Перепады давления измеряют с помощью датчиков 1 и 2 в точках, равноудаленных по размеру лопасти (в одном сечении см. фиг.2, 3), усиливают в блоке (4), передают полученный сигнал в кабину посредством светодиодного устройства (5), обрабатывают по заданной функциональной зависимости в функциональный преобразователь (блок 6)), на выходе которого получают сигналы, пропорциональные продольной Vx и поперечной Vz скоростям полета, которые затем индуцируют с помощью указателя скоростей (блок (7)).
Сигнал перепада давления с датчика давления (3) и выходной сигнал с датчика (9) частоты вращения ω, а также с датчика (20) азимутальный угол положения лопасти поступают в интегратор (8), вырабатывающий сигнал, пропорциональный осредненному за один оборот винта значению перепада давления  Одновременно сигнал с датчика (9) частоты вращения поступает на вход преобразователя (10) частоты в напряжение. Выходные сигналы интегратора (8), преобразователей (10-1) и (10-2), функционального преобразователя (13), датчика плотности воздуха за бортом вертолета (12) поступают на вход согласующего блока (11), который преобразует их в цифровой код, выход которого в виде цифрового сигнала поступает на вычислительный блок (14), в котором вычисляется величина тяги Т несущего винта вертолета; полученный результат индицируют с помощью указателя (15).
Одновременно сигнал с датчика (9) частоты вращения поступает на вход преобразователя (10) частоты в напряжение. Выходные сигналы интегратора (8), преобразователей (10-1) и (10-2), функционального преобразователя (13), датчика плотности воздуха за бортом вертолета (12) поступают на вход согласующего блока (11), который преобразует их в цифровой код, выход которого в виде цифрового сигнала поступает на вычислительный блок (14), в котором вычисляется величина тяги Т несущего винта вертолета; полученный результат индицируют с помощью указателя (15).
Сигнал с датчика перепада давления, измеренный датчиком давления (3), а также с выхода функционального преобразователя (4), поступает на вход вычислителя (19), с помощью которого определяется давление p при заданном угле ψ, т.е. p(х,ψ). Сигнал с выхода вычислителя (6-2), пропорциональный скорости Vx вертолета, поступает на вход функционального преобразователя (16). Выходы (16-2) и вычислителя (19) обрабатываются в функциональных преобразователях (17), а затем (18) на выходе последнего получают вес G=mg вертолета в полете, индицируют его на индикаторе указателя (26).
Сигнал с выхода блока (19) поступает на вход логического устройства (21), в котором определяется значение  при заданном ψ, измеряемом посредством датчика азимута (20). Выход логического блока (21) подключен ко входу функционального преобразователя (22), где сигнал обрабатывается по заданной функциональной зависимости, и получают сигналы, пропорциональные коэффициенту подъемной силы Су и угла атаки α лопасти в сечении по размаху z=0,7R. Сигналы с выходов функционального преобразователя (22) и формирователя критических значений Сукр и αкр (23) поступают на блок сравнения (24), где сравниваются Су и Сукр, а также α и αкр, a результаты сравнения в виде запасов ΔCy=Су-Сукр, Δα=α-αкр индицируются на указателе (25).
при заданном ψ, измеряемом посредством датчика азимута (20). Выход логического блока (21) подключен ко входу функционального преобразователя (22), где сигнал обрабатывается по заданной функциональной зависимости, и получают сигналы, пропорциональные коэффициенту подъемной силы Су и угла атаки α лопасти в сечении по размаху z=0,7R. Сигналы с выходов функционального преобразователя (22) и формирователя критических значений Сукр и αкр (23) поступают на блок сравнения (24), где сравниваются Су и Сукр, а также α и αкр, a результаты сравнения в виде запасов ΔCy=Су-Сукр, Δα=α-αкр индицируются на указателе (25).
Обработку сигналов с датчиков перепада давлений осуществляют с помощью разработанных автором математических соотношений, отражающих функциональные зависимости измеряемых перепадов давления на нижней и верхней поверхностях лопасти несущего винта.
Так, например, напряжения с выходов датчиков 1 и 2, поступающие на вход функционального преобразователя (4), преобразуются в соотношении
 ,
,
где k, k1, k2 - постоянные коэффициенты, зависящие от конструктивных особенностей лопасти несущего винта;
u1, u2 - выходные напряжения датчиков перепада давления 1 и 2;
u4 - выходное напряжение функционального преобразователя (4).
Величина напряжения u4 пропорциональна скоростному напору q, а с помощью функционального усилителя (6) входное напряжение u4 преобразуется в соотношение:
- на выходе (6-2) получают
 ;
;
- на выходе (6-1) получают
 ;
;
где  - выходное напряжение функционального преобразователя (6), пропорциональное продольной скорости Vх полета вертолета;
- выходное напряжение функционального преобразователя (6), пропорциональное продольной скорости Vх полета вертолета;  - выходное напряжение функционального преобразователя (6), пропорциональное поперечной скорости Vz полета вертолета; а1=a2u9; a2 - постоянная величина; u9 - сигнал с датчика угловой скорости вращения несущего винта, а=ψ1=π/2; b=ψ2=3π/2; с=ψ3=π; d=ψ4=0; ψ - угол азимута лопасти, на которой установлены датчики.
- выходное напряжение функционального преобразователя (6), пропорциональное поперечной скорости Vz полета вертолета; а1=a2u9; a2 - постоянная величина; u9 - сигнал с датчика угловой скорости вращения несущего винта, а=ψ1=π/2; b=ψ2=3π/2; с=ψ3=π; d=ψ4=0; ψ - угол азимута лопасти, на которой установлены датчики.
Выходные напряжения u3, u20 преобразовываются в функциональном блоке (интеграторе) (8) в напряжение u8, которое одновременно с сигналами u13, u6, u10 поступает через согласующий блок (11) на вход функционального преобразователя (14), где они преобразуются в напряжение u14, пропорциональное величине тяги T несущего винта вертолета:
 ,
,
где u8 - выходное напряжение интегратора (8);  ,
,  - выходные напряжения функционального преобразователя (10), реализующего зависимости
- выходные напряжения функционального преобразователя (10), реализующего зависимости  и
и  ; a1, a2, a3 - постоянные коэффициенты, зависящие от конструктивных особенностей лопасти несущего винта.
; a1, a2, a3 - постоянные коэффициенты, зависящие от конструктивных особенностей лопасти несущего винта.
Выходные напряжения с датчиков (3) и блока (4), поступающие на вход функционального преобразователя (19), преобразовываются в выходное напряжение
 .
.
Выходные сигналы с блока (16), в котором реализуются функциональные зависимости
 ,
,
 ,
,
поступают совместно с выходным сигналом u19 на вход функционального преобразователя (17), где на его выходе формируется соотношение в виде
 .
.
Выходное напряжение u17 поступает на вход усилителя (18), на выходе которого получают
 ,
,
пропорциональное полетному весу G вертолета, индицируемому указателем (18А).
Выходные напряжения u19 и u20 поступают на вход логического блока (21), на выходе которого формируется напряжение
 ,
,
где u19 - функция коэффициента перепада давления  от угла азимута, u20 пропорционален ψ.
от угла азимута, u20 пропорционален ψ.
Посредством функционального преобразователя (22) формируется сигнал
 ,
,
т.е. угол атаки α как функция угла азимута ψ.
Выходные сигналы формирователя критических значений αкр(Су кр) u22 и u23 поступают на вход блока сравнения (24), на выходе которого формируется соотношение
u24=u22-u23,
пропорциональное запасу по углу атаки α (коэффициенту подъемной силы) при эксплуатации (маневрах) вертолета.
Устройство, реализующее способ измерения параметров состояния вертолета в полете, представлено в виде структурно-функциональной блок-схемы (см. фиг.1).
Датчики перепада давления 1 и 2 регистрируют разность давления между верхней и нижней поверхностями в различных точках по хорде одной из лопастей несущего винта вертолета, своими выходами связаны со входами функционального преобразователя (4). Выход блока (4), а также выход датчика (20) соединены со входом функционального преобразователя (5), выход которого совместно с выходом датчика (9) поступает на вход функционального преобразователя (6), выход последнего соединен с указателем тяги (7).
Датчик перепада давления (3), установленный на лопасти несущего винта, своими выходами одновременно с датчиком (20) соединен с входом блока (8). Выход блока (8), а также выходы блоков (10) и (13) поступают на вход блока (11). Выход блока (11) через блок (14) подключен ко входу указателя(15).
Датчик перепада давления (3) своими выходами, одновременно с выходами блока (4), соединен со входами блока (19). Выход блока (17) соединен со входом блока (18), а выход последнего подключен ко входу указателя (18А).
Выход функционального преобразователя (19), одновременно с выходом датчика (20), подключен на вход функционального преобразователя (21), выход которого через блок (22) подключен ко входу блока (24). Одновременно вход (24) соединен с выходом блока (23). Указатель (25) своим входом соединен с выходом блока (24).
Работает устройство следующим образом.
Сигналы с выходов датчиков (1) и (2), пропорциональные перепадам давления на верхней и нижней поверхностях профиля лопасти несущего винта вертолета, поступают на функциональный преобразователь (4). Сигнал с выхода функционального преобразователя (4) и датчика (20) поступает на вход функционального преобразователя (5). Сигналы с выхода блоков (5) и (9) поступают на вход указателя (7) через функциональный преобразователь (6).
Сигнал с датчика перепада давления (3), пропорциональный перепаду давления на лопасти несущего винта, поступает на вход функционального преобразователя (интегратора) (6), на вход блока (8) поступает сигнал с датчика (20).
Выход блока (8), а также выходы блоков (10) и (18) подключены ко входам блока (11). Выход блока (11) через блок (14) соединен с указателем (15).
Сигнал с датчика перепада давления (3), пропорциональный перепаду давления на лопасти несущего винта, а также выход блока (4) поступают на вход функционального преобразователя (19). Выходы блоков (19) и (16) подключены ко входу блока (17), а выход последнего через блок (18) - на указатель (18А).
Выход функционального преобразователя (19), а также выход датчика (20) соединены со входами функционального преобразователя (21), выход которого через блок (22) соединен со входом блока (24). Выход блока (23) подключен ко входу блока (24), а выход последнего соединен со входом указателя (25).
Все датчики перепадов давления оснащены фильтрами выходного высокочастотного напряжения и конструктивно выполнены в виде блоков.
В настоящее время предлагаемый способ аэромеханического измерения параметров состояния вертолета в полете и устройство для его осуществления с применением разработанных автором математических алгоритмов обработки сигналов с датчиков перепада давления, установленных непосредственно на лопасти несущего винта вертолета Ми-8, были апробированы. Получены положительные результаты с рекомендациями серийного применения предлагаемого технического решения, на что имеются соответствующие документы от 5-го отделения ЦАГИ, ОКБ им. Миля.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОМЕХАНИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ ТРАЕКТОРИИ ПОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2336533C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТНОГО НАПОРА НА ЛОПАСТИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2001 |
|
RU2187821C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ВЕРТОЛЕТА В ГОРИЗОНТАЛЬНОМ ПОЛЕТЕ | 2001 |
|
RU2196305C2 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА, ЛОПАСТЬ ВИНТА | 2008 |
|
RU2374137C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ СРЫВА ПОТОКА НА ЛОПАСТЯХ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2555258C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
Изобретение относится к области измерительной техники и может найти применение для измерения параметров состояния вертолета в полете. Необходимость контроля угла атаки и тяги лопасти несущего винта обусловлена требованиями маневренности и желанием эксплуатирующих организаций перевозить грузы максимально допустимого веса. Выявлены функциональные соотношения между перепадом давления на лопасти несущего винта вертолета и величинами тяги несущего винта, скоростного напора, продольной и поперечной скоростями полета, полетного веса, угла атаки сечения лопасти и коэффициента подъемной силы. При этом измеренные сигналы с помощью датчиков перепадов давления преобразуют с помощью функциональных преобразователей устройства и по заданным функциональным зависимостям в виде математических соотношений вычисляют величины выходных напряжений функциональных преобразователей, пропорциональных искомым параметрам состояния вертолета в полете. Изобретение позволяет расширить возможности измерительных средств, в которых входным сигналом является поле сил аэродинамического давления. В данном случае увеличивается число параметров, подлежащих измерению, а также повышается точность измерения. 2 н.п. ф-лы, 3 ил.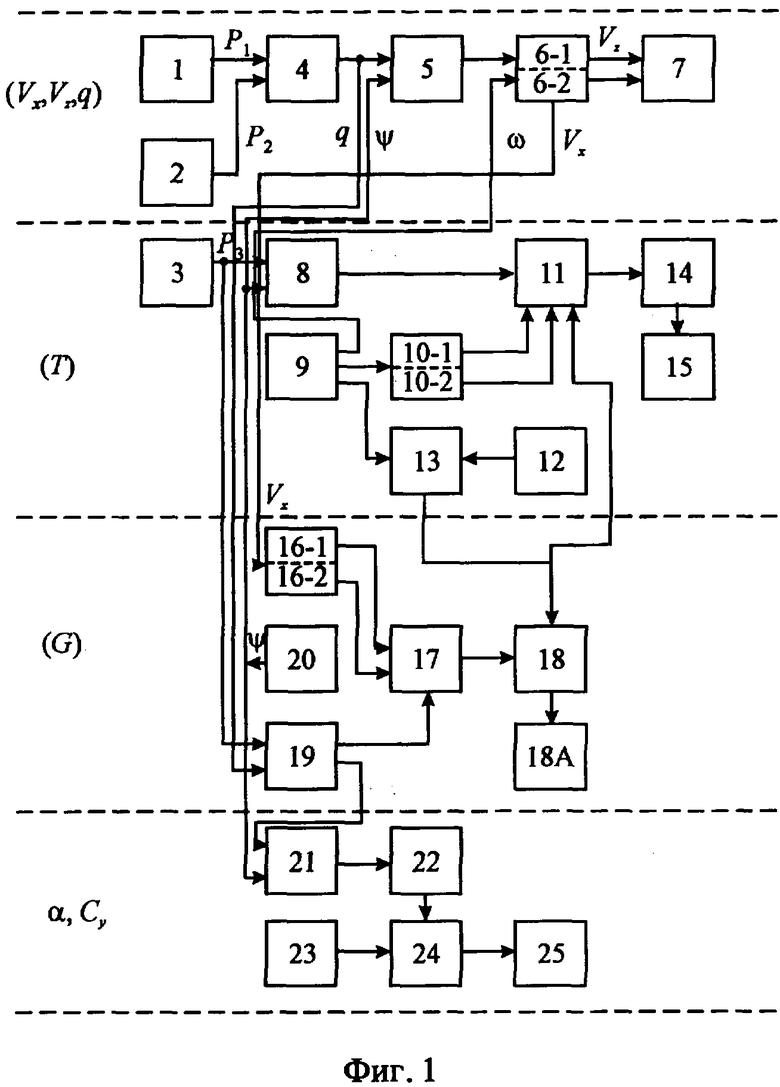
1. Аэромеханический способ измерения параметров состояния вертолета в полете, заключающийся в обработке функциональными преобразователями сигналов от установленных на одной из лопастей несущего винта вертолета датчиков перепада воздушного давления на верхней и нижней несущих поверхностях лопасти, и индицировании каждого из измеряемых параметров с помощью соответствующего указателя, отличающийся тем, что используют три датчика перепада воздушного давления, которые располагают по хорде профиля на одинаковых расстояниях от оси вращения упомянутой лопасти, при этом
продольную скорость Vx и поперечную скорость Vz (вдоль оси 0z связанной системы координат) полета вертолета определяют по напряжениям uVx и uVz на выходах соответствующего функционального преобразователя в соответствии с соотношениями
 ,
,
 ,
,
где uq - напряжение, отображающее скоростной напор q,
a=ψ1=π/2, b=ψ2=3π/2, c=ψ3=π, d=ψ4=0, ψ - угол азимута лопасти,
a1=a2uω,
а2 - постоянная величина,
uω - напряжение, отображающее частоту ω вращения несущего винта,
с промежуточным определением напряжения uq по соотношению
uq=k1u1+k2u2,
где k1, k2 - постоянные коэффициенты, зависящие от конструктивных особенностей лопасти несущего винта,
u1, u2 - выходные напряжения первого и второго датчиков перепада воздушного давления,
тягу несущего винта вертолета определяют по напряжению uT на выходе соответствующего функционального преобразователя в соответствии с соотношением
 ,
,
где b1, b2, b3 - постоянные величины,
uИНТ - напряжение, полученное путем интегрального
преобразования выходных сигналов третьего датчика перепада воздушного давления, а также сигналов, отображающих частоту ω вращения несущего винта и угол ψ азимута лопасти, т.е. отображающее осредненное за один оборот винта значение перепада давления,
uω пр (1), uω пр (2) - функционально преобразованные напряжения, отображающие частоту ω вращения несущего винта,
uρ - напряжение, отображающее плотность ρ воздуха за бортом вертолета,
полетный вес G вертолета определяют по напряжению uG на выходе соответствующего функционального преобразователя напряжения в соответствии с соотношением
 ,
,
где k, b4, b5 - постоянные величины,
uP - напряжение, отображающее давление P при заданном угле ψ азимута лопасти,
угол α атаки определяют по напряжению uα на выходе соответствующего функционального преобразователя в соответствии с соотношением
uα=uСу,α-uСу,α кр,
где uСу,α - сигнал, пропорциональный коэффициенту Су подъемной силы и углу α атаки,
uСу,α кр - сигнал, отображающий критические значения коэффициента Су кр подъемной силы и угла αкр атаки.
2. Устройство для измерения параметров состояния вертолета в полете, содержащее установленные на одной из лопастей несущего винта вертолета датчики перепада воздушного давления на верхней и нижней несущих поверхностях лопасти, функциональные преобразователи и указатели измеряемых параметров, отличающееся тем, что три датчика перепада давления расположены по хорде профиля на одинаковых расстояниях от оси вращения упомянутой лопасти, функциональные преобразователи сгруппированы в четыре группы с подключением выхода каждой из групп к одному из четырех указателей измеряемых параметров, при этом
в первой группе имеются первый функциональный преобразователь, выполненный в виде усилителя, второй функциональный преобразователь, выполненный в виде передающего светодиодного блока, и третий функциональный преобразователь, выполненный в виде формирователя напряжений, пропорциональных продольной скорости Vx и поперечной скорости Vz (вдоль оси 0z связанной системы координат) полета вертолета, при этом входы первого функционального преобразователя подключены к выходам первого и второго датчиков перепада воздушного давления, входы второго функционального преобразователя - к выходам первого функционального преобразователя и датчика угла азимута лопасти, входы третьего функционального преобразователя - к выходам второго функционального преобразователя и датчика частоты вращения несущего винта, а выходы третьего функционального преобразователя являются выходами сигналов продольной скорости Vx и поперечной скорости Vz,
во второй группе имеются первый функциональный преобразователь, выполненный в виде интегратора, второй функциональный преобразователь, выполненный в виде согласующего блока, третий функциональный преобразователь, выполненный в виде преобразователя частоты в напряжение, четвертый функциональный преобразователь, выполненный в виде вычислительного блока, и пятый функциональный преобразователь, выполненный в виде преобразователя плотности воздуха за бортом в напряжение, при этом входы первого функционального преобразователя подключены к выходам третьего датчика перепада воздушного давления и датчика угла азимута лопасти, входы второго функционального преобразователя - к выходу первого, третьего и пятого функциональных преобразователей, вход третьего функционального преобразователя - к выходу датчика частоты вращения несущего винта, вход четвертого функционального преобразователя - к выходу второго функционального преобразователя, входы пятого функционального преобразователя - к выходам датчика частоты вращения несущего винта и датчика плотности воздуха за бортом, выход четвертого функционального преобразователя является выходом сигнала тяги
uT,
в третьей группе имеются первый функциональный преобразователь, выполненный в виде преобразователя давления в напряжение при заданном угле азимута лопасти, второй функциональный преобразователь, выполненный в виде преобразователя полетного веса в напряжение, третий функциональный преобразователь, выполненный в виде преобразователя сигнала продольной скорости в напряжение, четвертый функциональный преобразователь, выполненный в виде усилителя, при этом входы первого функционального преобразователя подключены к выходам третьего датчика перепада воздушного давления и выходам первого функционального преобразователя первой группы, формирующего сигнал, пропорциональный скоростному напору, входы второго функционального преобразователя подключены к выходам первого и третьего преобразователей, входы четвертого функционального преобразователя подключены к выходам второго функционального преобразователя и пятого функционального преобразователя второй группы, а его выход является выходом сигнала полетного веса G вертолета,
в четвертой группе имеются первый функциональный преобразователь, выполненный в виде логического блока, второй функциональный преобразователь, выполненный в виде преобразователя коэффициента подъемной силы в напряжение, и третий функциональный преобразователь, выполненный в виде преобразователя запаса по углу атаки α в напряжение, при этом входы первого функционального преобразователя подключены к выходам первого функционального преобразователя третьей группы и датчика угла азимута лопасти, вход второго функционального преобразователя подключен к выходу первого функционального преобразователя, входы третьего функционального преобразователя подключены к выходам второго функционального преобразователя и формирователя критического угла атаки, а выход третьего функционального преобразователя является выходом сигнала угла α атаки.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТНОГО НАПОРА НА ЛОПАСТИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2001 |
|
RU2187821C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| Устройство для автоматического регулирования насосов | 1938 |
|
SU55479A1 |
| Устройство для измерения аэродинамических параметров несущих винтов вертолетов | 1960 |
|
SU139936A1 |

