Известны вертикальные градиентометры, содержащие камеру с жидкостью, в «oTOipoft размещена чувствительная система в виде двух (разнесенных по высоте жестко связанных друг с другом масс 1положительной и отрицательной плавучести.
Предложенное устройство отличается тем, что к одной из 1масс -прикреплено тело с большим, чем У жидкости коэффициентом объемтюго сжатия, а в стенку камеры с внутренней сторойы вмонтирован сильфон с выведенной наружу силовой установкой, связа-нной через усилитель и фазочувствительный детекто-р с; генератором вертикальных механических колебаний, .на котором уста-новлеи корпус, и датчиком перемещений, соединенным с пружиной чувствительной системы, укрепленной на жесткой овяз« 1масс. Это позволяет устранить погрешности, возникающие йз-за нестабильного уравновешивания чувствительного элемента градиента и, тем самым повысить точность измерений.
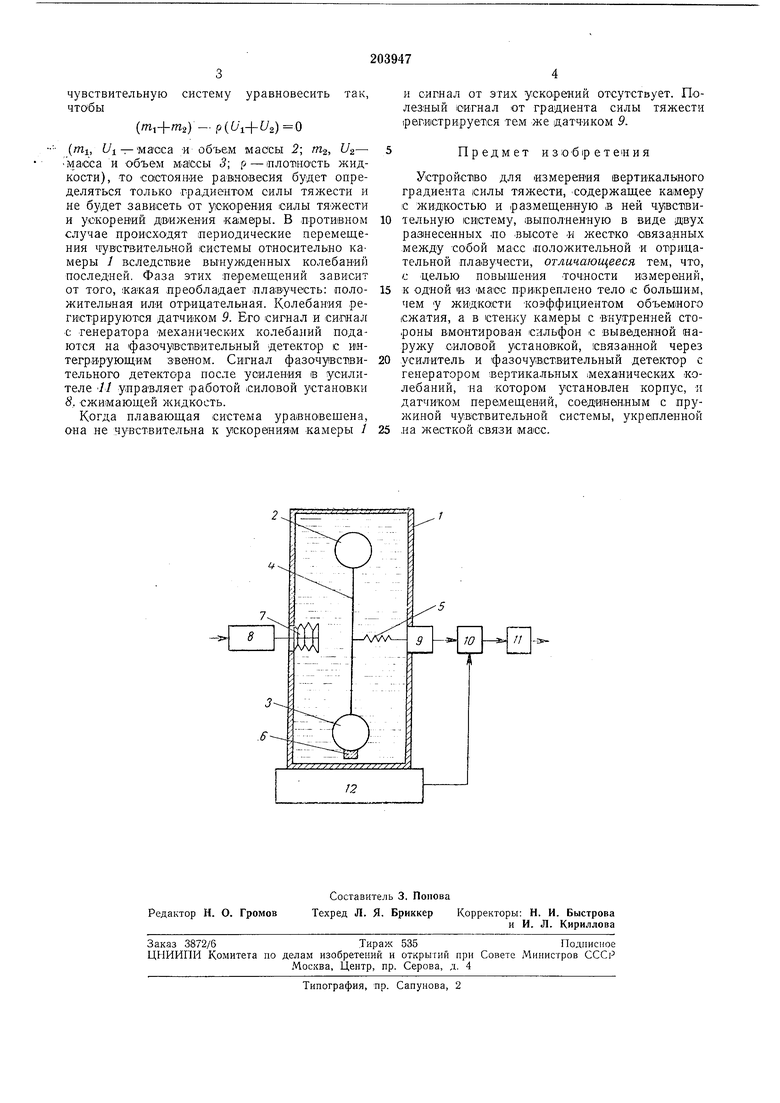
На чертеже представлена схема предложенного устройства.
жины малой жесткости 5, тела 6, сильфона 7, вделаняого в стенку камеры /, силовой установки 8, датчика перемещений 9, фазочувствительного детектора 10 с интегрирующим звеном, усилителя // и генератора 12 механических колебаний. Тело 6, сильфон 7 и силовая установка 8 образуют систему регулировки плавучести. Сильфон 7 сжимается и разжимается с
помощью силовой ycTaHOiBKH 8. При этом изменяется сжатие жидкости. Небольшое сжимаемое тело 6, например -кусочек резины, имеет значительно больший коэффициент объемного сжатия, чем жидкость и массы 2
и 5. Поэтому оно легко сжимается, изменяя свой объем и, следовательно, плавучесть системы. Если уменьшить сжатие жидкости, тело 6 В|Следствие своей упругости увеличится и объеме.
Для получения сигнала о неуравновешенности плавающей системы камера / с помощью генератора 12 приводится в периодическое колебательное движение вдоль вертикали, с таким ускорением, чтобы скорость движения плавающей системы относительно корпуса была невелика, тогда сила сопротивления со стороны л идкости движению плавающей системы будет пропорциональна первой степени скорости этого движения. Если
чувствительную систему уравновесить так, чтобы
(mi+TTZa) - p() 0
(mi, t/i M&oca и объем массы 2; т-2, масса и объем м.аюсы 3; р-плотность жидкости), то састояБие рааногвесия будет онределяться только градиентом силы тяжести и не будет зависеть от ускорения силы тяжести и ускорений движения камеры. В противном случае происходят периодические перемещения чувстВИтелвной системы относительно камеры / вследст1вие вынужденных колебаний последней. Фаза этих перемещений зависит от того, какая преобладает плавучесть: положительная или отрицательная. Колебания регистрируются датчиком 9. Его сигнал и си-гаал с генератора -механических колебаний подаются на фазочувствителвный детектор с и«тегрирующим звеном. Сигнал фазочувст1вительного детектора после усиления в усилителе 11 управляет работой силовой установки 8, сжимающей жидкость.
Когда плавающая система уравновешена, Она не чувствительна к ускореиия м камеры /
и сигнал от этих ускорений отсутствует. Полезный сигнал от градиента силы тяжести регистрируется тем же датчиком 9.
Предмет изобретеиия
Устройство для измерения вертикального градиента силы тяжести, Содержащее камеру с жид;ко стью и размещен1ную ,в ней чу вст1вительную систему, :вынолненную в виде йвух разнесенных по -высоте « жестко связанных .между собой масс положительной и от1ри11,ательной плавучести, отличающееся тем, что, с делью повышения точности измерений,
к одной из масс прикреплено тело с большим, чем у жидкости коэффициентом объемяого сжатия, а в стеаку камеры с внутренней стороны Вмонтирован сильфон с выведенной иаружу силовой установкой, связанной через
усилитель и фазочувствительный детектор с генератором вертикальных 1механических колебаний, на котором установлен корпус, и датчиком перемещений, соединенным с прун иной чувствительной системы, укрепленной
,на жесткой связи масс.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 1969 |
|
SU232534A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| АКСЕЛЕРОМЕТР ГИДРОСТАТИЧЕСКИЙ | 2011 |
|
RU2488125C1 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| Магнитогидродинамический датчик угловой скорости с жидким ферромагнитным ротором | 2019 |
|
RU2772568C2 |
| Поплавковый маятниковый акселерометр | 1981 |
|
SU1040425A1 |
| Устройство для воспроизведения инфранизкочастотных гармонических ускорений | 1990 |
|
SU1763989A2 |
| Вариометр | 1986 |
|
SU1384040A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| Акселерометр | 1990 |
|
SU1774266A1 |
