Устройства для изучения электрической активности нервных клеток, выполненные в виде микроманипуляторов ic механической, злектромеханической, гидравлической и пневматической подачей или с возвратно-поступательными перемещениями микроэлектрода посредством пьезокристаллических, магпитостр.икциоиных и других вибраторов, известны.
Однако такие устройства обеспечивают только плавное перемещение микроэлектрода или его Возвратно-поступательное двилсение с малой а1мплитудой.
Цель .изобретения - получение оптимальной амплитуды единичной подачи микроэлектрода при импульсном режиме работы электромагнита. Для этого е нем установлены оснащенный держателем микроэлектрода индикатор, например, часового типа, храповой механизм, кинематически связанный с электромагнитом, и муфта с байопетным замком, соединенная посредством оси с микрометрическим винтом.
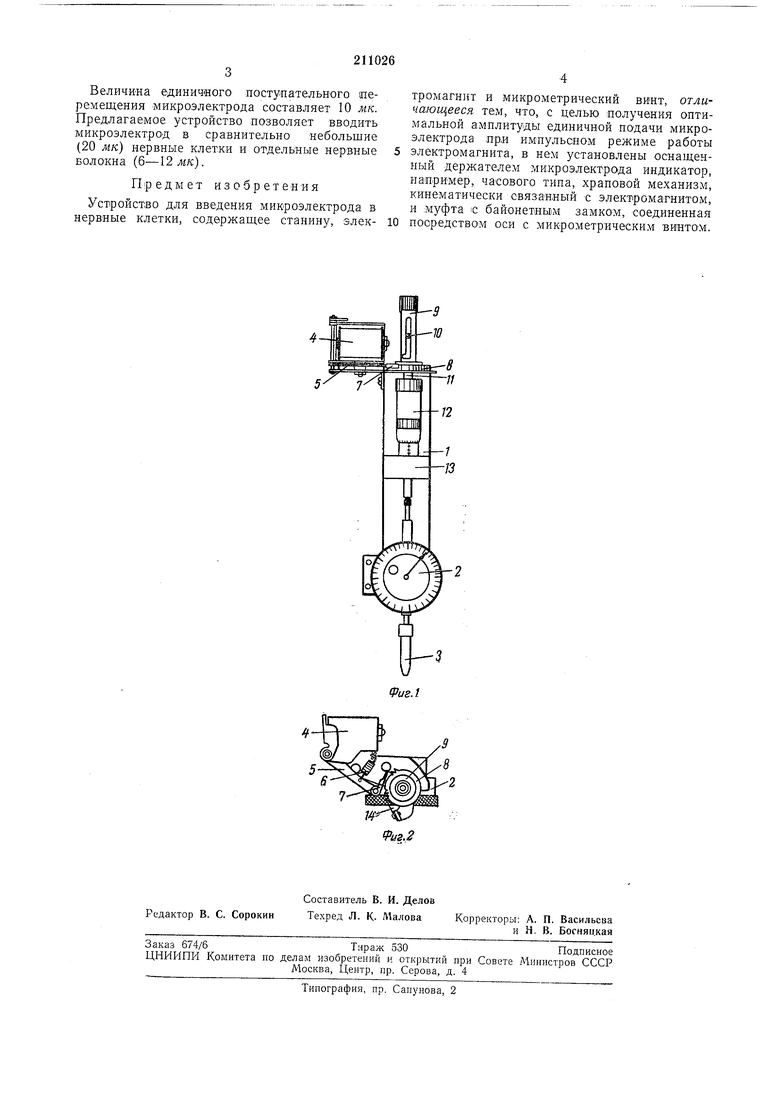
На фиг. 1 изображено описываемое устройство, вид спереди; на фиг. 2 - то же, вид сверху.
На станине / закреплены индикатор 2 часового типа, несущий держатель 3 микроэлектрода, электрО:},1агнит 4, оснащенный рычагом 5 с пружиной 6 и шарнирной собачкой 7, храповое колесо 8, муфта 5 с Г-образным пазом под щтифт 10. Образующий вместе с пазом
байонетный замок щтифт с помощью оси 11 соединен с микрометрическим винтом 12, закрепленным в стойке 13. Храповик 5 фиксируется посредством стопо-рной пружины 14.
При подаче в обмотку электромагнита импульса тока рычаг 5 под действием возвратной пружины 6 заставляет собачку 7 толкать храповое колесо, соединенное с муфтой 9. Поворот муфты через штифт 10 и ось 11, жестко соединенную с микровинтом 12, вызывает перемещение оси индикатора 2, а вместе с ней и микроэлектрода. После каждого цикла храповик фиксируется стопорной пружиной 14. Таким образом, создается только поступательное движение .микроэлектрода. После его погружения на заданную величину возврат микровинта в исходное положение осуществляется вручную. Для этого муфту 9 поднимают в крайнее положение .и фиксируют с помощью штифта 10 в поперечном пазе байонетного замка. При этом штифты (на чертеже не показаны), соединяющие муфту с храповиKOiM, освобождаются и микровинт свободно вывинчивается. Шток индикатора 2 под действием пружины перемещается вместе с микроэлектродом вслед за микровинтом. Электромагнит 4 может управляться как вручную, так и с помощью тактового генератора или программного устройства, позволяющего автоматизировать процесс поиска клеток.
Величина единичного поступательного перемещения микроэлектрода составляет 10 мк. Предлагаемое устройство позволяет вводить микроэлектрод в сравнительно небольшие (20 мк) нервные клетки и отдельные нервные волокна (6--12 мк).
Предмет изобретения
Устройство для введения микроэлектрода в нервные клетки, содержащее станину, электромагнит и микрометрический винт, отличающееся тем, что, с целью получения оптимальной амплитуды единичной подачи микроэлектрода пр,и импульсном режиме работы электромагнита, в нем установлены оснащенный держателем микроэлектрода индикатор, например, часового типа, храповой механизм, кинематически связанный с электромагнитом, и :муфта 1C байонетным замком, соединенная посредством оси с микрометрическим винтом.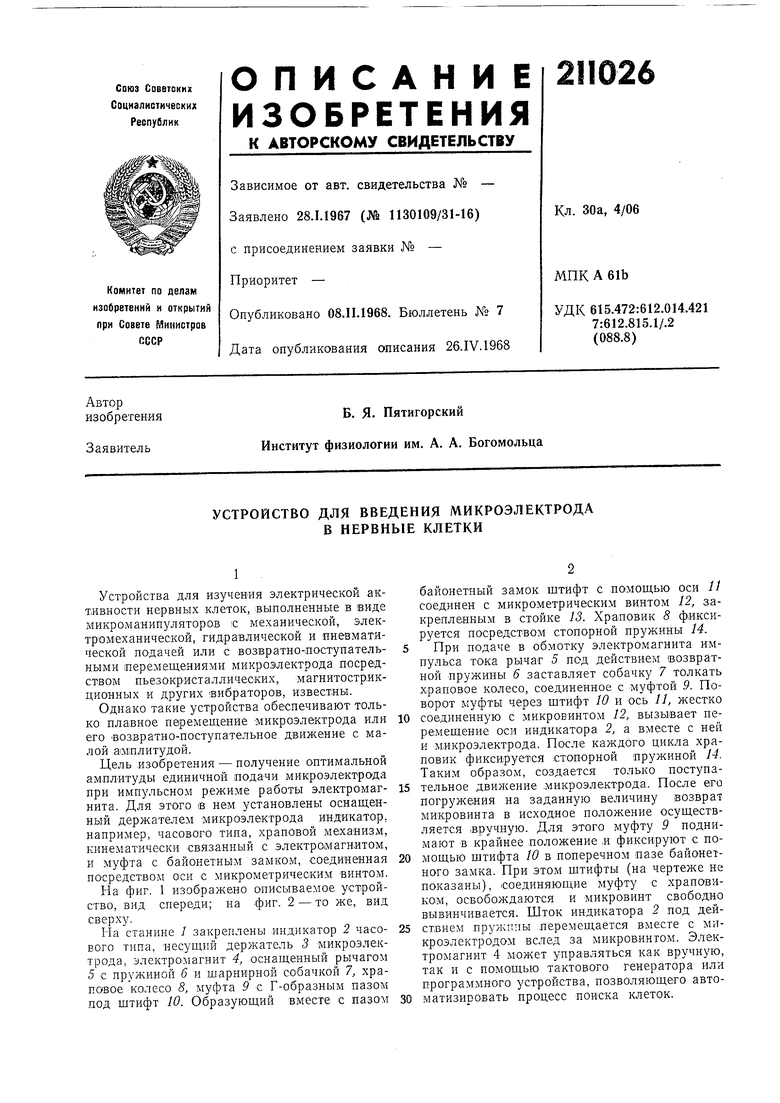
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ВВЕДЕНИЯ МИКРОЭЛЕКТРОДА В ВОЗБУДИМЫЕ СТРУКТУРЫ | 1969 |
|
SU256156A1 |
| АТЕНТПО- 7i, ТЕХИИ^ЕСллЯ ^ БКЙЛИОТЕНА | 1970 |
|
SU275292A1 |
| Механизм для накопления телеграфных сигналов | 1938 |
|
SU55666A1 |
| Привод возвратно-поступательного перемещения | 1977 |
|
SU744175A1 |
| )МЕХАНИЗМ МИКРОМЕТРИЧЕСКОЙ ПОДАЧИ МИКРОТОМА | 1967 |
|
SU214841A1 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU297504A1 |
| Привод к много контактному стрелочному и маршрутно-сигнальному коммутатору аппарата электрической централизации | 1938 |
|
SU58175A1 |
| Устройство для прокладывания уточных нитей на рапирном ткацком станке | 1987 |
|
SU1437432A1 |
| МЕХАНИЗМ ФИКСИРОВАНИЯ ДИАФРАГМЫ | 1992 |
|
RU2020529C1 |
| Демонстрационное устройство | 1979 |
|
SU898493A1 |
