Известные пр обр азователи прямого действия пневматического датчика усадки материала, включающие кор-пус, выходное сопло, заслонку и щуп, не обеспечивают достаточного диапазОНа измерения линейного перемещения щупа.
В предлагаемом преобразователе заслонка выполнена в виде пластины, ювязанной со щупом, причем, плоскость пластины, обращенная к соплу, расположена под углом от О до 2 к направлению перемещения пластины, а сама пластина установлена на платформе с возможностью поворота в плоскости, параллельной направлению перемещения тележки.
Такое исполнение преобразователя расщиряет диапазон перемещения щупа.
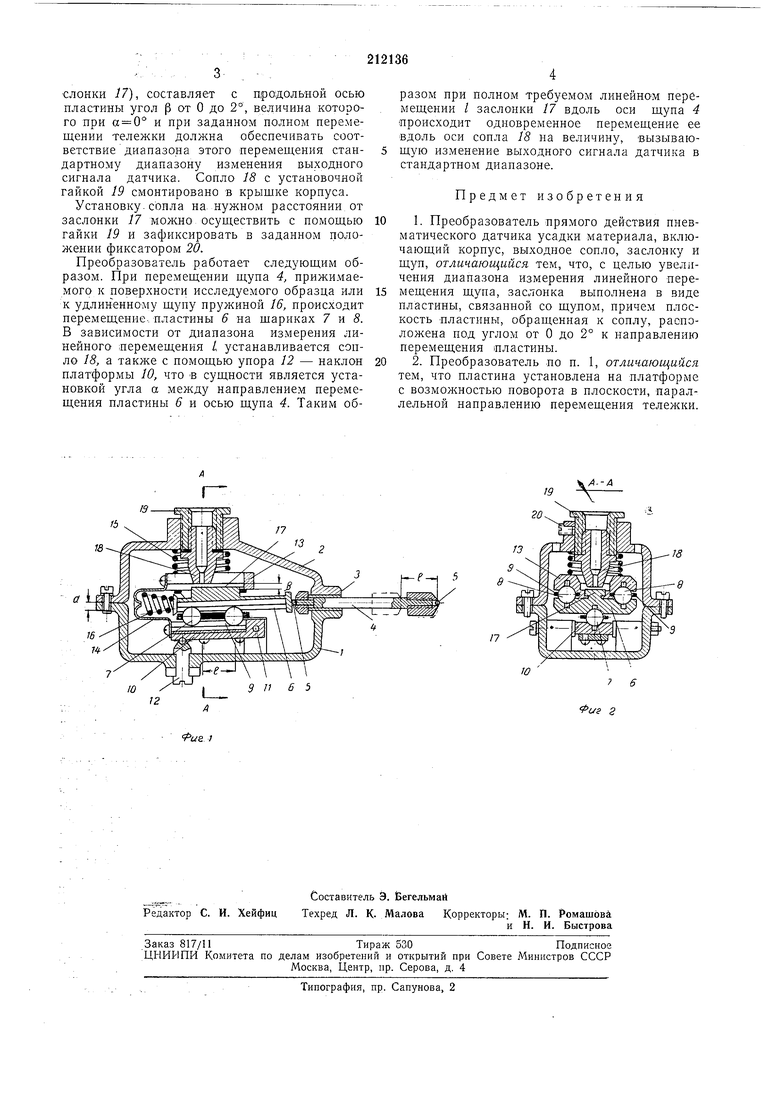
На фиг. 1 показано продольное сечение предлагаемого преобразователя; на фиг. 2- разрез по А-А на фиг. 1.
Корпус преобразователя состоит из основания 1 я крышки 2. Через направляющую вгулку 3 свободно проходит щуп 4, имеющий на обеих концах шариковые упоры 5. Внешний шариковый упор 5 служит для осуществления контакта с удлиненным щупом или контактует непосредственно с образцом материала или деталью. Внутренний шариковый упор 5 щупа 4 контактует с пластиной 6. Пластина установлена на тр.ех парах шариков - одна пара шариков 7 помещена снизу пластины 6
по ее центральной продольной оси, две другие пары шариков 8 установлены сверху, у боковых граней пластины по осям, параллельным центральной. Шарики каждой пары связаны 5 между собой обоймой 9. Пара шариков 7, расположенная в канавках, параллельным продольной оси пластины связывает последнюю с платформой 10. Эта платформа установлена на оси 11, ввинченной в основание /
0 корпуса, и на винтовом упоре 12. Вращая винт 12 можно изменять угол а между продольной осью перемещения пластины 6 и осью щупа 4. Устойчивая связь пластины 6 с платформой
5 10 обеспечена с помощью верхних пар шариков 8, также расположенных в канавках и связывающих пластину с рамкой 13. Последняя связана с платформой 10 пружинной скобой 14 и прижимает пластину 6 к этой платформе при помощи пружины 15. Контакт передней части пластины 6 с внутренним шариковым упором 5 щупа 4 и прижим внешнего упора этого щупа к удлиненному щупу или к поверхности измеряемого образца обеспечи5 вает пружина 16.
Со стороны крышки 2 корпуса пластина 6 имеет прилив - собственно заслонку 17 перед выходным соплом 18. Ось сопла перпендикулярна оси щупа 4. Плоскость пластины
слонки 17), составляет с продольной осью пластины угол р от О до 2°, величина которого при а 0° и нри заданном полном перемещении тележки должна обеспечивать соответствие диапазона этого перемещения стаидартному диапазону изменения выходного сигнала датчика. Сопло 18 с установочной гайкой 19 смонтировано в крышке корпуса.
Установку.сопла на нужном расстоянии от заслонки 17 можно осуществить с помощью гайки 19 и зафиксировать в заданном положении фиксатором 20.
Преобразователь работает следующим образом. При перемещении щупа 4, прижимаемого к поверхности исследуемого образца или к удлин енному щупу пружиной 16, происходит перемещение-, пластины 6 на шариках 7 п 8. В зависимости от диапазона измерения линейного перемещения /, устанавливается сопло 18, а также с помощью упора 12 - наклон платформы 10, что в сущности является установкой угла а между направлением перемещения пластины 6 и осью щупа 4. Таким образом при полном требуемом линейном перемещении / заслонки 17 вдоль оси щупа 4 происходит одновременное перемещение ее вдоль оси сопла 18 на величину, вызывающую изменение выходного сигнала датчика в стандартном дианазоне.
Предмет изобретения
1.Преобразователь нрямого действия пневматического датчика усадки материала, включающий корпус, выходное сопло, заслонку и щуп, отличающийся тем, что, с целью увеличения диапазона измерения линейного перемещения щупа, заслонка выполнена в виде пластины, связанной со щупом, причем плоскость пластины, обращенная к соплу, расположена под углом от О до 2° к направлению перемещения пластины.
2.Преобразователь по п. 1, отличающийся тем, что пластина установлена на платформе с возможностью поворота в плоскости, параллельной направлению перемещения тележки.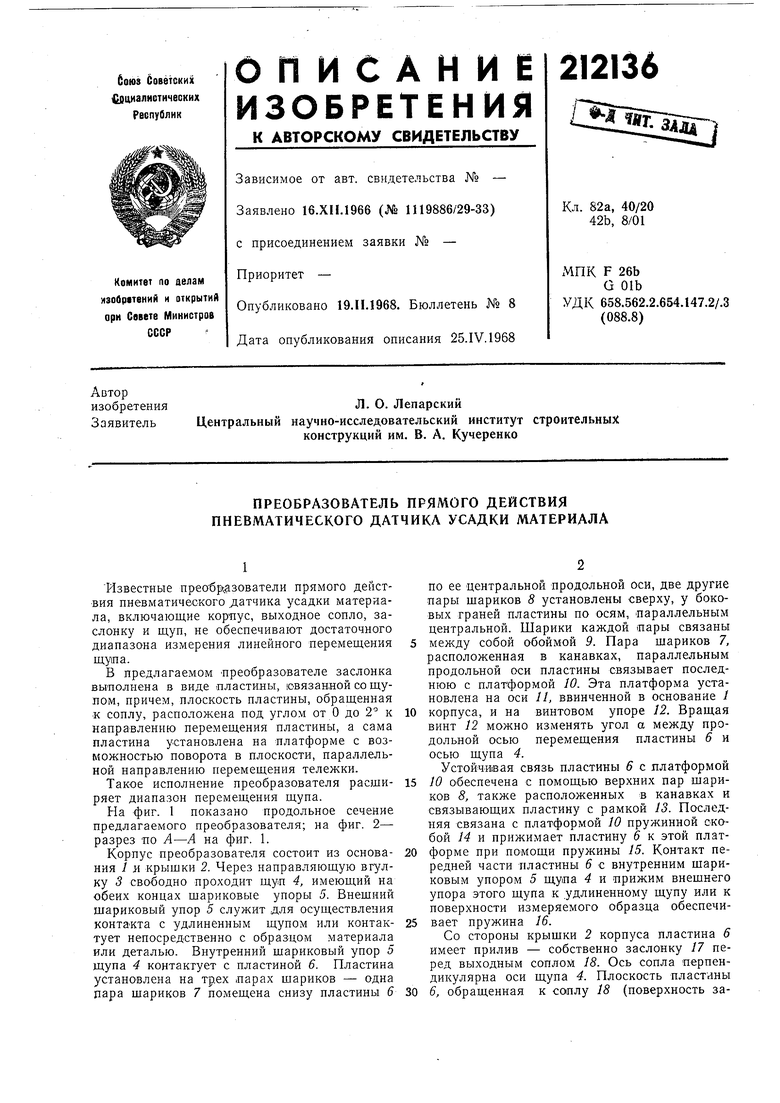
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПНЕВМАТИЧЕСКОГО ДАТЧИКА УСАДКИ МАТЕРИАЛОВ | 1966 |
|
SU214397A1 |
| Сварочная головка для многопроходнойСВАРКи глубОКиХ РАздЕлОК | 1979 |
|
SU841838A1 |
| КООРДИНАТНО-ИЗМЕРИТЕЛЬНАЯ МАШИНА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ НА ОБЪЕКТЕ ИЗМЕРЕНИЯ, А ТАКЖЕ ПОВОРОТНО-НАКЛОННЫЙ МЕХАНИЗМ ДЛЯ ТАКОЙ КООРДИНАТНО-ИЗМЕРИТЕЛЬНОЙ МАШИНЫ | 2008 |
|
RU2451265C2 |
| Механотронный преобразователь линейных перемещений | 1991 |
|
SU1816961A1 |
| Двухкоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков | 2023 |
|
RU2808155C1 |
| ЛИНЕЙНЫЙ АКТУАТОР И ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2018 |
|
RU2700562C1 |
| 3D-ПРИНТЕР | 2019 |
|
RU2698353C1 |
| Однокоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков | 2023 |
|
RU2815852C1 |
| Пневматический измерительный преобразователь теплотехнического параметра | 1973 |
|
SU508123A1 |
| Автомат для сортировки внутренних и наружных колец шариковых радиальных подшипников | 1958 |
|
SU120919A1 |
F5
18
19
