Изобретение относится к машиностроению, а именно к конструкции 3D-принтеров, работающих по FDM-технологии и может быть использовано для послойного формирования изделий на основе их трехмерного цифрового представления.
Как следует из достигнутого уровня техники в 3D-принтерах относительное перемещение печатающей головки (экструдера) и рабочего стола, на котором формируется изделие, по трем взаимно перпендикулярным направлениям может обеспечиваться различными конструктивными решениями:
- за счет перемещения печатающей головки по трем взаимно перпендикулярным направлениям относительно неподвижно расположенного стола (см., например, CN 205255533 (U), Zhao Zheng, 2016);
- за счет перемещения печатающей головки по двум взаимно перпендикулярным направлениям, лежащим в горизонтальной плоскости, а также перемещения стола в вертикальном направлении (см. например, US 9108360 (В2), COMB JAMES W et al., 2015; US 2016/0167309 (A1), PANOWIN TECHNOLOGIES CO LTD, 2016; RU 2552235 (C1), Исупов В.В. и др., 2014; RU 181398 U1, "Центр инновационных технологий", 12.07.2018);
- за счет перемещения печатающей головки по двум взаимно перпендикулярным направлениям, лежащим в вертикальной плоскости, а также прямолинейного перемещения стола в горизонтальной плоскости в направлении, перпендикулярном направлению перемещения печатающей головки в горизонтальной плоскости (см., например, CN 205326300 (U), UNIV SCIENCE & TECH ZHENGZHOU, 2016; US 9479667 (B1), XYZPRINTING INC, et al., 25.10.2016);
- за счет прямолинейного перемещения печатающей головки в горизонтальной плоскости, а также перемещения стола по двум взаимно перпендикулярным направлениям, лежащим в вертикальной плоскости, перпендикулярной направлению перемещения печатающей головки.
Последнее техническое решение описано в патенте RU 2649738 С1, "ФИМАКО МАРКЕТИНГ СА", 04.04.2018, и является ближайшим аналогом к патентуемому устройству (прототип).
3D-принтер содержит печатающую головку, держатель, стол и каркас, размещенный на корпусе процессорного блока управления, который выполнен с возможностью управления процессом послойного формирования трехмерных изделий, при этом каркас включает, по меньшей мере, одно горизонтально расположенное плоское основание, которое установлено на вертикально расположенных опорных элементах. Печатающая головка закреплена на ходовом элементе, который с возможностью скользящего продольного перемещения размещен, по крайней мере, на одной горизонтальной направляющей, которая установлена на верхней поверхности упомянутого основания и определяет первую горизонтальную ось декартовой системы координат, в которой осуществляется формирование трехмерного изделия.
Печатающая головка связана с приводным ремнем первого ременного механизма преобразования вращательного движения в прямолинейное перемещение, снабженного электроприводом. Держатель размещен на двух параллельных между собой вертикальных направляющих, определяющих вертикально расположенную ось упомянутой декартовой системы координат, при этом держатель расположен перпендикулярно осям упомянутых вертикальных направляющих, а упомянутые оси лежат в вертикальной плоскости, перпендикулярной упомянутой горизонтальной направляющей. Держатель размещен на упомянутых вертикальных направляющих с возможностью продольного скользящего перемещения по ним посредством снабженного электроприводом механизма винт-гайка.
Верхние концы упомянутых направляющих соединены с основанием каркаса, а закрепление их нижних концов выполнено разъемным; стол содержит столешницу и подставку, при этом столешница посредством трех регулируемых по высоте опор закреплена на подставке. Одна из вертикальных плоскостей симметрии столешницы, которая ортогональна ее боковым сторонам, расположена перпендикулярно упомянутой горизонтальной направляющей и параллельна вертикальной плоскости, в которой лежат оси упомянутых вертикальных направляющих. На нижней поверхности подставки стола размещен ходовой элемент, установленный с обеспечением возможности скользящего продольного перемещения на направляющем элементе, который закреплен на верхней поверхности держателя и определяет вторую горизонтально расположенную ось упомянутой декартовой системы координат, при этом подставка связана с приводным ремнем второго ременного механизма преобразования вращательного движения в прямолинейное перемещение, снабженного соответствующим электроприводом.
Недостаток прототипа состоит в том, точность позиционирования головки определяется люфтом, возникающим за счет износа пары ходового и направляющего элементов, посредством которых стол перемещается в направлении оси Y, что требует периодического контроля износа. При наличии люфта стол будет находиться не в горизонтальном, а в недетерминированном (как по величине, так и по направлению) наклонном положении, которое также может изменяться в процессе формирования изделия. Иными словами, наличие люфта приводит к вибрации стола в процессе формирования изделия. Наклон же стола приводит к тому, что вне зависимости от положения стола по осям Y и Z при перемещении головки по оси X, расстояние между срезом сопла и верхней поверхностью стола будет монотонно изменяться. При этом степень этого изменения будет зависеть как от величины наклона стола, так и от положения стола по оси Y, поскольку при перемещении стола по оси Y будет изменяться положение ходового элемента (выполняющего также функцию «опоры стола») относительно вертикальной плоскости, в которой при возвратно-поступательном перемещении головки лежит ось ее сопла.
Таким образом, появление люфта между упомянутой парой элементов приводит к потере точности изготовления. Замена же упомянутых средств сопряжена с существенными трудозатратами.
Настоящее изобретение направлено на решение технической проблемы, состоящей в исключении возможности возникновения вибраций стола, обусловленных люфтом вследствие износа ходового и направляющего элементов пары, определяющих точность изготовления изделий, в чем и состоит технический результат.
Достигаемые при этом дополнительные технические результаты заключаются в увеличении длительности межремонтных интервалов (в увеличении ресурса работы устройства), в упрощении проведения ремонтно-профилактических работ, а также в снижении затрат на заменяемые детали.
Патентуемый 3D-принтер содержит печатающую головку, держатель, стол и каркас, размещенный на корпусе процессорного блока управления послойного формирования трехмерных изделий, при этом каркас включает, по меньшей мере, одно горизонтально расположенное плоское основание, которое установлено на вертикально расположенных опорных элементах. Печатающая головка закреплена на ходовом элементе, который с возможностью скользящего продольного перемещения размещен, по крайней мере, на одной горизонтальной направляющей, которая установлена на верхней поверхности упомянутого основания и определяет первую горизонтальную ось декартовой системы координат, в которой осуществляется формирование трехмерного изделия. Печатающая головка связана с приводным ремнем первого ременного механизма преобразования вращательного движения в прямолинейное перемещение, снабженного электроприводом, держатель размещен на двух параллельных между собой вертикальных направляющих, определяющих вертикальную ось декартовой системы координат, при этом держатель расположен перпендикулярно осям вертикальных направляющих, а оси лежат в вертикальной плоскости, перпендикулярной горизонтальной направляющей.
Держатель размещен на вертикальных направляющих с возможностью продольного скользящего перемещения по ним посредством снабженного электроприводом механизма винт-гайка. Верхние концы направляющих соединены с основанием каркаса, а закрепление их нижних концов выполнено разъемным; стол содержит столешницу и подставку, при этом столешница посредством трех регулируемых по высоте опор закреплена на подставке. На нижней поверхности подставки стола размещен ходовой элемент, установленный с возможностью скользящего продольного перемещения на направляющем элементе, который закреплен на верхней поверхности держателя и определяет вторую горизонтально расположенную ось декартовой системы координат. Подставка связана с приводным ремнем второго ременного механизма преобразования вращательного движения в прямолинейное перемещение, снабженного соответствующим электроприводом.
Устройство, в отличие от прототипа, характеризуется тем, что ходовой элемент выполнен с длиной, превышающей как длину направляющего элемента, так и длину хода стола на величину, которая не меньше длины направляющего элемента; торцевые стороны направляющего элемента размещены по обе стороны относительно вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла; направляющий элемент расположен параллельно и на конечном расстоянии относительно вертикальной плоскости симметрии столешницы, которая ортогональна ее боковым сторонам, расположенным перпендикулярно упомянутой горизонтальной направляющей и параллельна вертикальной плоскости, в которой лежат оси вертикальных направляющих.
Принтер может характеризоваться тем, что направляющий элемент размещен относительно упомянутой вертикальной плоскости симметрии столешницы на расстоянии, которое не меньше 0,07 размера столешницы в направлении, перпендикулярном ее вертикальной плоскости симметрии.
Принтер может характеризоваться и тем, что пара ходовой и направляющий элементы выполнена в виде шариковой линейной передачи, причем направляющая этой передачи закреплена на нижней поверхности подставки стола, а ее ползун - на верхней поверхности держателя.
Принтер может характеризоваться также тем, что содержит закрепленный на держателе и намагниченный в вертикальном направлении постоянный магнит, а также выполненный из магнитомягкого материала элемент удлиненной формы, который расположен параллельно вертикальной плоскости симметрии столешницы и закреплен на нижней поверхности подставки стола напротив и с зазором относительно обращенного к нему полюса упомянутого постоянного магнита, который расположен симметрично относительно вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла, и с той же стороны относительно направляющего элемента, что и вертикальная плоскость симметрии столешницы.
Принтер может характеризоваться и тем, что подставка стола выполнена из магнитомягкого материала, а на держателе симметрично относительно вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла, и с той же стороны относительно направляющего элемента, что и вертикальная плоскость симметрии столешницы, закреплен постоянный магнит, намагниченный в вертикальном направлении, при этом напротив обращенного вверх полюса постоянного магнита и с зазором относительно него размещен выполненный за одно целое с подставкой стола элемент удлиненной формы, расположенный параллельно вертикальной плоскости симметрии столешницы.
Принтер может характеризоваться, кроме того, тем, что постоянный магнит и направляющий элемент расположены по разные стороны относительно вертикальной плоскости симметрии столешницы.
Принтер может характеризоваться также тем, что между направляющим элементом и постоянным магнитом на держателе закреплен регулируемый по высоте упор, на который с возможностью свободного перемещения относительно него оперт расположенный параллельно вертикальной плоскости симметрии столешницы контактный элемент, который или выполнен за одно целое с подставкой стола, или закреплен на нижней поверхности, при этом упор расположен симметрично относительно вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла.
Принтер может характеризоваться, кроме того, тем, что взаимодействующая с контактным элементом часть упомянутого упора выполнена в виде шарика, закрепленного с возможностью свободного вращения.
Принтер может характеризоваться и тем, что взаимодействующая с контактным элементом часть упомянутого упора выполнена в виде ролика, закрепленного с возможностью вращения относительно горизонтально расположенной оси.
Принтер может характеризоваться также тем, что на держателе закреплен подпружиненный в вертикальном направлении и вниз шарик, установленный с возможностью свободного вращения, или ролик, установленный с возможностью вращения относительно горизонтально расположенной оси, который расположен симметрично относительно вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла, и с той же стороны относительно направляющего элемента, что и вертикальная плоскость симметрии столешницы, а на подставке стола закреплен взаимодействующий с упомянутым шариком или роликом опорный элемент, который расположен параллельно вертикальной плоскости симметрии столешницы и имеет длину, обеспечивающую контакт с шариком или роликом при перемещении стола из одного крайнего положения в другое.
В патентуемом 3D-принтере, по отношению к прототипу, обеспечивается, с одной стороны, выборка образовавшихся зазоров между элементами упомянутой пары и люфта, а, следовательно, устраняются вибрации стола. С другой стороны, обеспечивается возможность вручную, посредством регулируемых опор, обеспечить неизменность расстояния между срезом сопла печатающей головки и верхней поверхностью столешницы по всей длине хода печатающей головки. Исключение же влияния износа элементов пары приводит к увеличению длительности межремонтных интервалов, а использование упора позволяет упростить и удешевить проведение ремонтно-профилактических работ. Иными словами, патентуемое изобретение позволяет существенно повысить эксплуатационные параметры 3D-принтера.
Другие технические результаты станут понятными из подробного описания со ссылками на чертежи, описанием конкретных примеров, которые, однако, не являются единственно возможными, но наглядно демонстрируют возможность достижения упомянутых выше технических результатов патентуемой совокупностью существенных признаков.
Существо изобретения поясняется на чертежах.
фиг. 1- схематично изображен 3D-принтер, общий вид, стол в задвинутом положении, а также декартова система координат, в которой осуществляется формирование трехмерного изделия;
фиг. 2 - то же, что на фиг. 1, но стол в выдвинутом положении;
фиг. 3 - стол в выдвинутом положении, но столешница показана прозрачной;
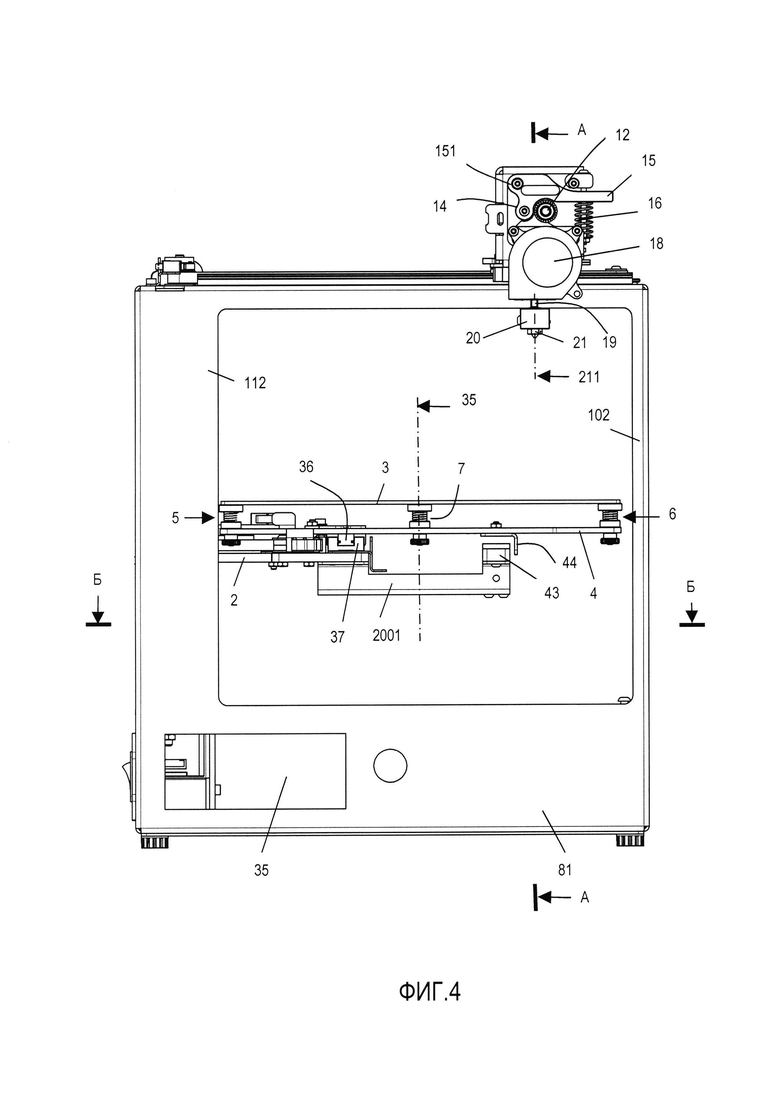
фиг. 4 - вид спереди;
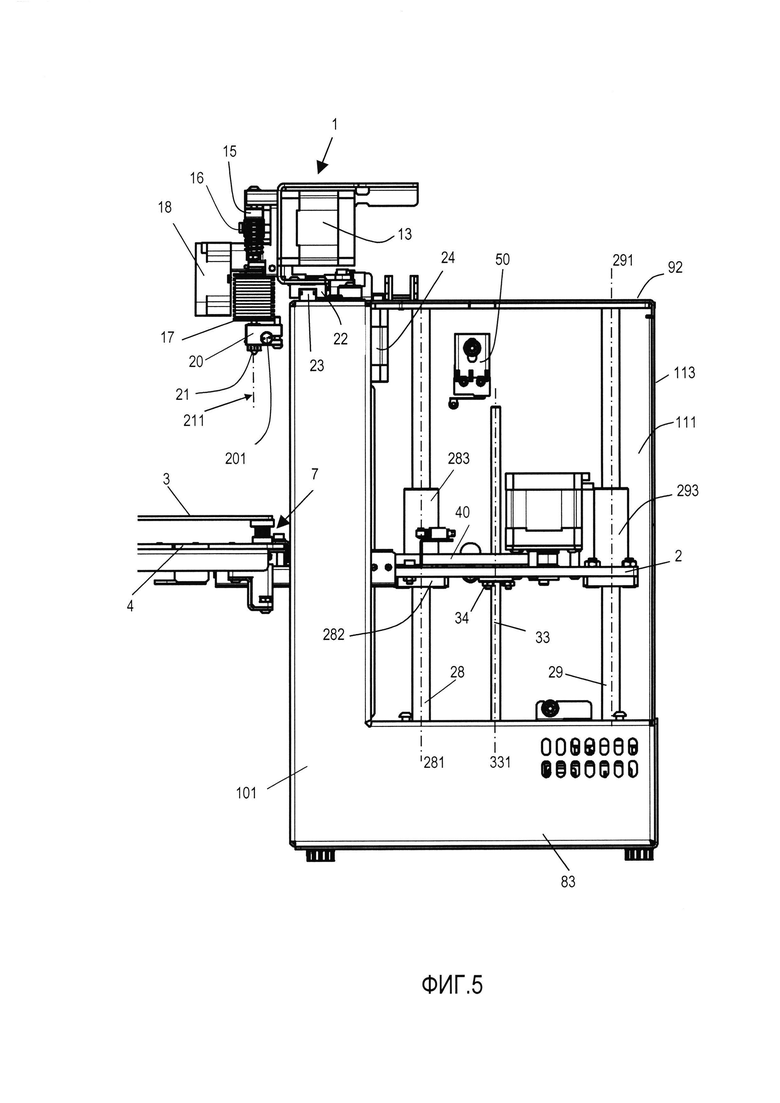
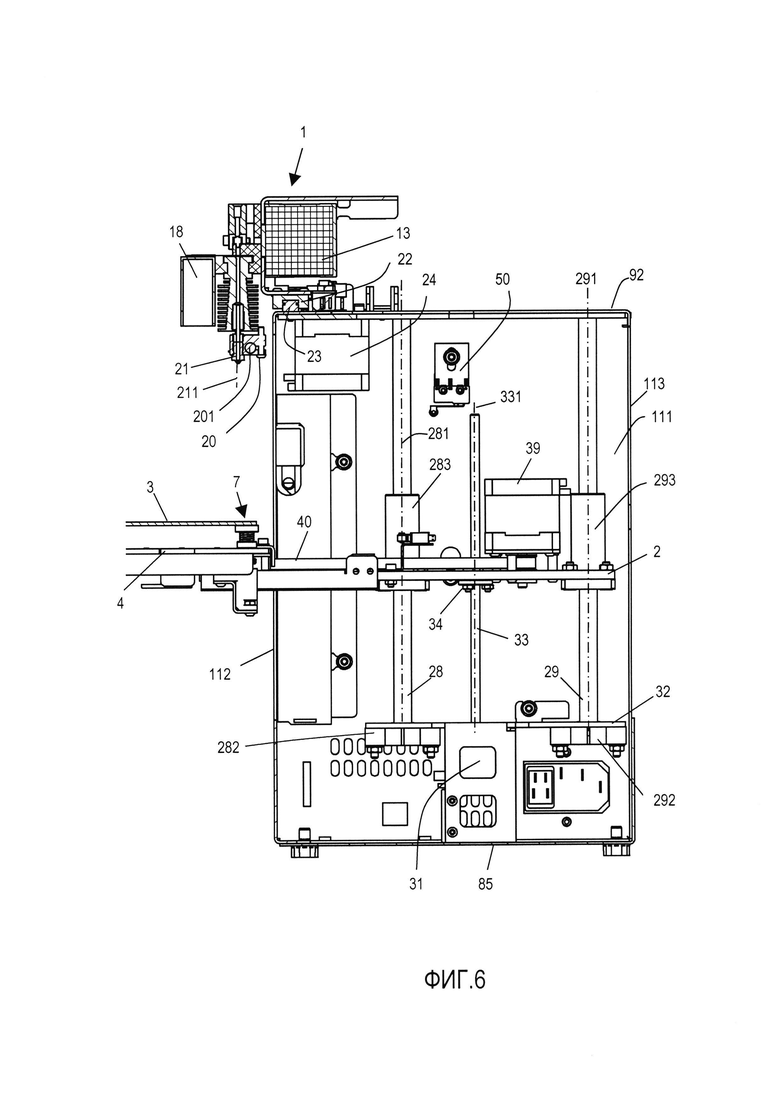
фиг. 5 - вид с правого бока, стол в выдвинутом положении; фиг. 6 - вид по А-А фиг. 4;
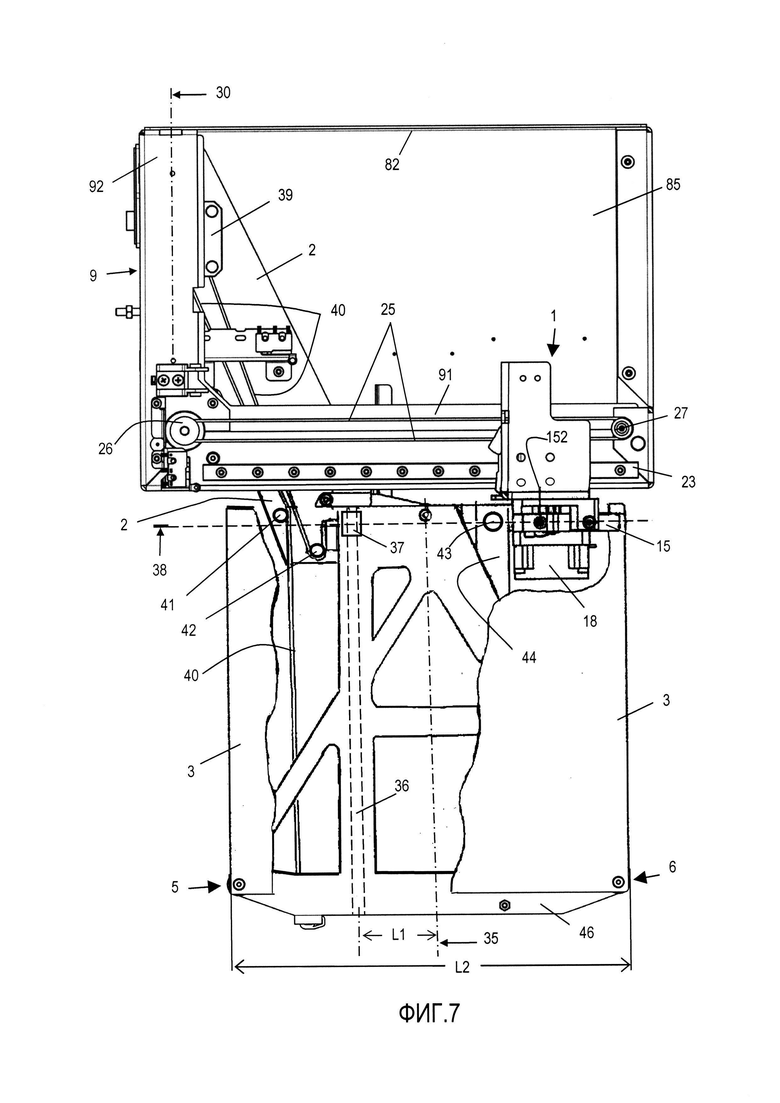
фиг. 7 - вид сверху, стол в выдвинутом положении; фиг. 8 - сечение по Б-Б фиг. 4;
фиг. 9 - пример создания дополнительного крутящего момента посредством подпружиненного ролика;
на фиг. 10 и 11 - то же, что на фиг. 4 и 7, соответственно, при наличии регулируемого по высоте упора;
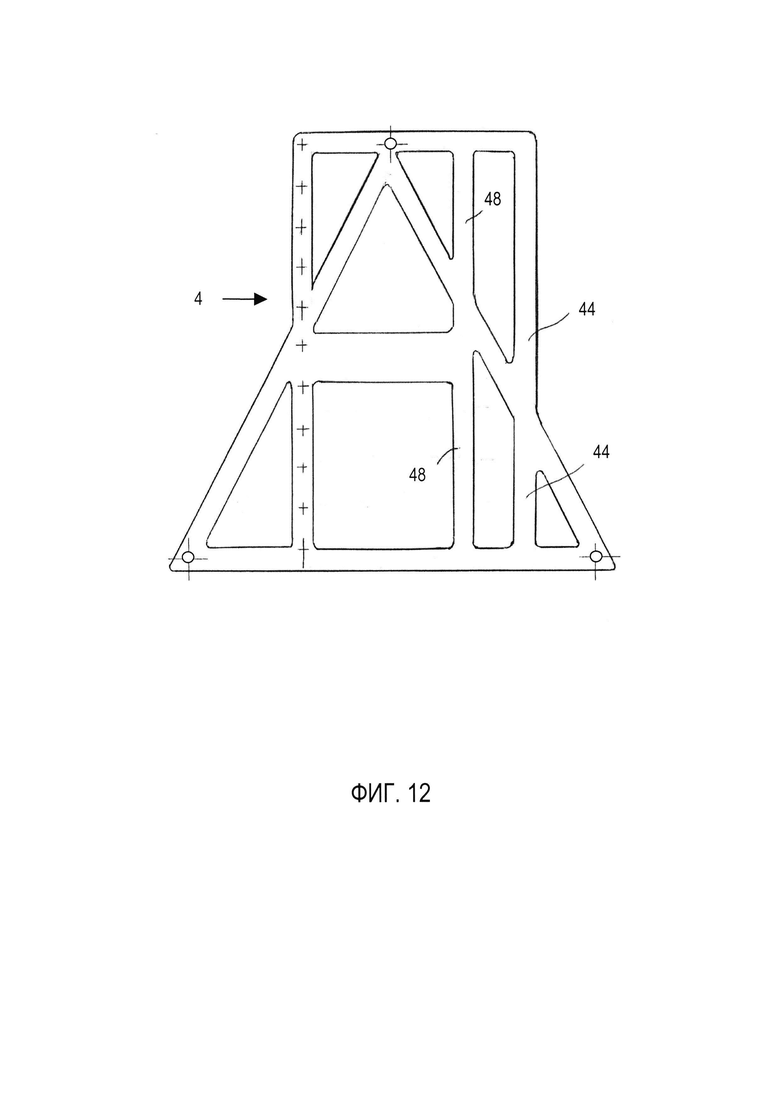
фиг. 12 - пример выполнения подставки стола за одно целое с элементом удлиненной формы и контактным элементом.
3D-принтер содержит (фиг. 1-6) печатающую головку 1 (экструдер), держатель 2, стол, включающий столешницу 3, выполненную с обеспечением возможности нагрева ее верхней (рабочей) поверхности до требуемой температуры и подставку 4. Столешница 3 посредством трех регулируемых по высоте опор 5, 6 и 7 (фиг. 4-6) закреплена на подставке 4. Принтер имеет корпус 8, в котором размещен процессорный блок управления.
В представленном на чертежах предпочтительном воплощении патентуемого изобретения корпус 8 процессорного блока управления содержит выполненные из листового металла и вертикально расположенные переднюю 81 и заднюю 82 стенки, первую 83 и вторую 84 боковые стенки, а также днище 85 и съемную верхнюю крышку (на чертежах не показана). Корпус 8 включает горизонтально расположенное металлическое плоское основание 9, предпочтительно, Г-образной формы, первый 91 и второй 92 элементы, которого сопряжены друг с другом под прямым углом и имеют удлиненную форму, а также вертикально расположенные опорные элементы 10 и 11. Основание 9 Г-образной формы посредством опорных элементов 10 и 11 закреплено: на корпусе 8 процессорного блока управления, при этом в представленном на чертежах конкретном примере воплощения изобретения первый элемент 91 расположен вдоль его стенки 81, а второй элемент 92 расположен вдоль его второй боковой стенки 84.
Опорный элемент 10 выполнен из листового металла и в сечении имеет П-образную форму. Верхний конец элемента 10 жестко соединен с концевым участком первого элемента 91, а лицевая полка 102 (здесь используются понятия, принятые при характеристике швеллеров) и стенка 101 опорного элемента 10 расположены заподлицо и выполнены за одно целое соответственно с передней 81 и первой боковой 83 стенками корпуса 8. В случае выполнения опорного элемента 10 в виде отдельной детали из листового металла, его верхний конец (аналогично тому, как описано выше) жестко соединен с концевым участком первого элемента 91. Нижний конец его лицевой полки 102, расположенной заподлицо с передней стенкой 81 корпуса 8, а также нижний конец его стенки 101, расположенный заподлицо с первой боковой стенкой 83 того же корпуса 8, жестко соединены (например посредством сварки) соответственно с передней 81 и первой боковой 83 стенками корпуса 8.
Опорный элемент 11 в описываемом примере также выполнен из листового материала и имеет в сечении П-образную форму. Стенка 111 имеет ширину, равную длине второй боковой стенки 84 корпуса 8, расположена заподлицо и выполнена за одно целое с ней. Лицевая полка 112 опорного элемента 11 и его тыльная полка 113 расположены заподлицо соответственно с передней 81 и задней 82 стенками корпуса 8 и выполнены заодно целое с соответствующей каждой полке 112 и 113 стенками 81 и 82 корпуса 8. Верхние концы стенки 111 и полок 112 и 113 расположены заподлицо с соответствующими им элементами 91 и 92 и жестко соединены с ними. Аналогично тому, как было описано выше, опорный элемент 11 может быть выполнен в виде отдельной детали, стенка 111, полки 112 и 113 которого расположены заподлицо с соответствующей каждой из них стенкой (81, 84 и 82) корпуса 8. При этом нижние концы стенки и полок опорного элемента 11 жестко (посредством сварки) соединены с соответствующей каждой стенкой корпуса 8.
В других примерах воплощения патентуемого изобретения опорные элементы 10 и 11 могут быть выполнены в виде стоек предпочтительно круглого или прямоугольного сечения. Однако в этом случае вместо описанного выше опорного элемента 11 используется, по меньшей мере, две стойки (как в прототипе), расположенные последовательно вдоль второго элемента 92 основания 9. В принципе в патентуемом изобретении каркас может быть выполнен и в виде отдельного конструктивного узла, включающего (как и в прототипе) параллельные между собой верхнее и нижнее основания, расположенные горизонтально, при этом, по меньшей мере, верхнее основание выполнено Г-образной формы, а основания соединены между собой вертикально расположенными стойками.
Аналогично тому, как и в прототипе, представленный на чертежах пример расположения элементов 91 и 92 вдоль смежно расположенных вертикальных стенок корпуса 8 процессорного блока управления соответственно передней 91 и второй боковой 94, не является единственным возможным. Так, в других примерах воплощения элементы 91 и 92 могут быть расположены вдоль соответствующей каждому из них вертикальной стенки следующих пар смежно расположенных вертикальных стенок корпуса:
- вдоль передней стенки 81 и вдоль первой боковой стенки 83;
- вдоль задней стенки 82 и вдоль первой боковой стенки 83;
- вдоль задней стенки 82 и вдоль второй боковой стенки 84;
- вдоль первой боковой стенки 83 и вдоль задней стенки 82;
- вдоль второй боковой стенки 84 и вдоль задней стенки 82.
Что касается расстояния между лицевыми полками 102 и 112, то оно, по меньшей мере, на удвоенную величину гарантированного зазора превышает размер столешницы 2 вдоль первого элемента 91.
В зависимости от конкретных конструктивных особенностей изготавливаемого трехмерного изделия, могут быть использованы известные печатающие головки с различным количеством сопел. На чертежах в качестве иллюстрации схематично представлен пример простейшего выполнения печатающей головки 1 с одним соплом. Головка 1 (фиг. 4-7) содержит механизм подачи нити из расходного материала, включающий зубчатое колесо 12, связанное с выходным валом электропривода 13 (предпочтительно шагового электродвигателя) и прижимной ролик 14, размещенный на рычаге 15, имеющий ось 151 поворота и отверстие 152. При этом ось прижимного ролика 14 параллельна оси зубчатого колеса 12, а конец рычага 15 посредством цилиндрической пружины 16 сжатия подпружинен снизу. Регулировка величины прижима ролика 14 к колесу 12 осуществляется посредством гайки, навинченной на резьбовой стержень (на чертежах не показан), расположенный соосно оси цилиндрической пружины 16.
Кроме того, печатающая головка 1 содержит (фиг. 4-7) оребренный цилиндрический корпус 17, вентилятор 18, соединительную трубку 19, нагревательный блок 20 и сопло 21 с осью 211, при этом верхний конец соединительной трубки 19 (выполняющей также функцию «термобарьера») размещен в цилиндрическом корпусе 17, а ее нижний конец соединен с нагревательным блоком 20, который выполнен в форме прямоугольного параллелепипеда из материала с высокой теплопроводностью (алюминия или меди).
В блоке 20 выполнено (фиг. 1) вертикально расположенное сквозное резьбовое отверстие, а также горизонтально расположенное сквозное отверстие, в котором размещен нагреватель 201. Соединительная трубка 19 выполнена из материала с низкой теплопроводностью (например, из нержавеющей стали) и, предпочтительно, с кольцевой проточкой на ее внешней поверхности, образующей участок с высоким тепловым сопротивлением. Нижний конец трубки 19 ввинчен в верхнюю часть упомянутого вертикально расположенного сквозного резьбового отверстия, выполненного в нагревательном блоке 20, а в нижнюю часть того же отверстия ввинчено сопло 21 с обеспечением контакта ее верхней торцевой поверхности с поверхностью нижнего торца трубки 19.
Печатающая головка 1 закреплена на ходовом элементе, выполненном, предпочтительно, в виде ползуна 22 который с возможностью скользящего (посредством, предпочтительно, линейной шариковой передачи) продольного перемещения размещен на горизонтальной направляющей 23, выполненной, предпочтительно, с двумя продольными пазами (каналами), расположенными оппозитно на ее боковых сторонах и с обеспечением возможности взаимодействия с ними шариков упомянутой передачи (фиг. 5-6).
Горизонтальная направляющая 23 (фиг. 1-3, 6 и 7) установлена на верхней поверхности первого элемента 91 основания 9 и расположена в его продольном направлении. Направляющая 23 задает первую горизонтально расположенную ось, а именно ось X декартовой системы координат (изображенной на фиг. 1), в которой осуществляется формирование трехмерного изделия. В принципе, в качестве ходового элемента могут быть использованы и другие средства того же назначения, известные из уровня техники, например, каретка. При этом каретка (на чертежах не показана) с возможностью скользящего продольного перемещения может быть установлена на двух параллельных друг другу горизонтальных направляющих, а сами горизонтальные направляющие расположены на верхней поверхности первого элемента 91 основания 9 и в его продольном направлении.
Перемещение (позиционирование) печатающей головки 1 осуществляется посредством снабженного электроприводом 24 (предпочтительно, шаговым электродвигателем, размещенным, например, на нижней поверхности первого элемента 91 основания) первого ременного механизма преобразования вращательного движения в прямолинейное перемещение, содержащего связанные между собой посредством приводного ремня 25, шкив 26, закрепленный на вертикально расположенном выходном валу электродвигателя 24, и ролик 27, установленный с возможностью вращения вокруг вертикально расположенной оси, и имеющий тот же диаметр, что и шкив 26.
Концевые участки приводного ремня 25 расположены вдоль горизонтальной направляющей 23, а его концы закреплены или на печатающей головке 1 или на ползуне 22.
Таким образом, печатающая головка 1 закреплена на ходовом элементе, который с возможностью скользящего продольного перемещения размещен, по крайней мере, на одной горизонтальной направляющей 23, которая установлена на верхней поверхности первого элемента 91 основания 9 и определяет первую горизонтально расположенную ось декартовой системы координат, в которой осуществляется формирование трехмерного изделия. Направляющая 23 расположена вдоль элемента 91, а печатающая головка 1 связана непосредственно или через ходовой элемент с концами приводного ремня 25 первого ременного механизма преобразования вращательного движения в прямолинейного перемещение.
Держатель 2 размещен на двух параллельных между собой вертикальных направляющих 28 и 29, определяющих вертикально расположенную ось Z декартовой системы координат (фиг. 1), в которой осуществляется формирование трехмерного изделия. Держатель 2 расположен перпендикулярно осям 281 и 291 вертикальных направляющих 28 и 29. Оси 281 и 291 лежат в вертикальной плоскости 30, перпендикулярной направляющей 25, задающей первую горизонтально расположенную ось X системы координат. Держатель 2 размещен на направляющих 28 и 29 с обеспечением возможности скользящего продольного перемещения по ним посредством снабженного соответствующим электроприводом 31 (предпочтительно шаговым электродвигателем) механизма преобразования вращательного движения в поступательное перемещение, выполненного в виде механизма винт-гайка.
Верхние концы вертикальных направляющих 28 и 29 соединены неразъемно: со вторым элементом 92 основания 9, а их нижние концы посредством соответствующего каждой вертикальной направляющей 28 и 29 разъемного зажимного средства 282, 292, разъемно закреплены, например, на горизонтально расположенной полке 32. В принципе нижние концы вертикальных направляющих 28 и 29 могут быть разъемно закреплены на верхней стенке корпуса 8 в случае выполнения ее несъемной (в отличие от описываемого примера воплощения изобретения). Подвижное соединение держателя 2 с каждой вертикальной направляющей 28 и 29 может быть реализовано путем использования любых известных из уровня техники средств, например, посредством, соответственно, линейных шариковых передач (подшипников) 283 и 293, закрепленных на держателе 2, или с помощью подшипников скольжения, выполненных в виде втулок удлиненной формы из антифрикционного материала (например, из латуни) с фланцем.
Винт 33 упомянутого механизма винт-гайка расположен между первой 28 и второй 29 вертикальными направляющими, при этом ось 331 винта 33 расположена в той же плоскости 30, что и оси 281 и 291 вертикальных направляющих 28 и 29 (фиг. 8). Нижний конец винта 33 (в представленном примере воплощения изобретения) соединен непосредственно или через муфту (на чертежах не показано) с выходным валом электропривода 31, закрепленного на нижней поверхности полки 32. Навинченная же на винт 34 ходовая гайка 35 выполнена из антифрикционного материала и закреплена на держателе 2.
Стол содержит столешницу 3 в виде горизонтально расположенной прямоугольной сплошной пластины из материала с высокой теплопроводностью (например, алюминия), снабженную средствами (на чертежах не показаны) для нагрева ее верхней рабочей поверхности до требуемой температуры и подставку 4. Одна из вертикальных плоскостей 35 симметрии столешницы 3 (фиг. 4 и 7), которая ортогональна ее боковым сторонам, расположена, во-первых, перпендикулярно горизонтальной направляющей 23 (задающей первую горизонтально расположенную ось X упомянутой системы координат), а во-вторых, параллельна вертикальной плоскости 35 (фиг. 8), в которой лежат оси 281 и 291 вертикальных направляющих 28 и 29 (определяющих вертикально расположенную ось Z той же системы координат). Столешница 3 посредством трех регулируемых по высоте опор 5-7 (фиг. 4-6) закреплена на подставке 4, выполненной также из листового материала и (в предпочтительном воплощении) имеет размеры в плане, не превышающие размеры столешницы 3. В подставке 4 для каждой регулируемой опоры 5, 6, 7 выполнено соответствующее отверстие. При этом, как в подставке 4, так и в описанном выше держателе 2 (фиг. 3 и 7), могут быть выполнены сквозные отверстия, позволяющие уменьшить их вес, а, следовательно, инерционность подвижных элементов патентуемого принтера.
На нижней поверхности подставки 4 закреплен ходовой элемент 36 удлиненной формы, расположенный параллельно вертикальной плоскости 35 симметрии столешницы 3 и на расстоянии L1 от плоскости 35, которое не меньше 0,07 размера L2 столешницы 3 в направлении, перпендикулярном ее вертикальной плоскости 35 симметрии (на фиг. 7 ходовой элемент 36 показан штриховыми линиями). Элемент 36 с возможностью скользящего продольного перемещения установлен на направляющем элементе 37, имеющем удлиненную форму и закрепленном на верхней поверхности держателя 2. Торцевые (поперечные) стороны направляющего элемента 37 расположены по обе стороны (предпочтительно симметрично) относительно вертикальной плоскости 38, в которой при возвратно-поступательном перемещении головки 1 лежит ось 211 ее сопла 21. Длина элемента 36 превышает как длину элемента 37, так и длину хода стола на величину, которая не меньше (в предпочтительном воплощении патентуемого изобретения - равна) длины(е) направляющего элемента 37.
В качестве направляющего 37 и ходового 36 элементов могут быть использованы известные из уровня техники соответственно направляющие и ползуны, профиль которых является ответным профилю направляющей, при этом, в отличие от традиционного их использования, ходовой элемент (ползун) имеет большую длину по сравнению с направляющей, по меньшей мере, на длину хода стола.
Что касается использования линейных шариковых передач, то, поскольку промышленностью не выпускаются шариковые линейные передачи, в которых длина ползуна больше длины направляющей, в качестве ходового элемента 36 используется направляющая шариковой линейной передачи, а в качестве направляющего элемента 37 - ползун упомянутой линейной передачи.
Перемещение (позиционирование) столешницы 3 в направлении второй оси (а именно, оси Y, декартовой системы координат, см. фиг. 1), осуществляется посредством снабженного (фиг. 5÷7) соответствующим электроприводом 39 (предпочтительно, шаговым электродвигателем) и размещенного, например, на верхней поверхности держателя 2, второго ременного механизма преобразования вращательного движения в прямолинейное перемещение. Механизм включает связанные между собой посредством приводного ремня 40 шкив (на чертежах не показан), закрепленный на вертикально расположенном выходном валу электропривода 39, и ролики 41 и 42, установленные с возможностью вращения вокруг соответствующей каждому из них вертикально расположенной оси, при этом концевые участки приводного ремня 40 закреплены соответственно на переднем и заднем участках подставки 4 (фиг. 7).
Таким образом, за счет указанного выше размещения направляющего элемента 37 относительно вертикальных плоскостей 35 и 38, а также выполнения ходового элемента 36, вне зависимости от положения стола по оси Y, возникает обусловленный гравитацией крутящий момент, обеспечивающий, при наличии люфта между элементами 36 и 37, выборку образовавшихся зазоров, что препятствует вибрации стола. В представленном примере, за счет упомянутого крутящего момента, имеет место перевес той части стола, которая расположена справа относительно ходового 36 и направляющего 37 элементов.
Однако стремление снизить инерционность подвижных частей путем снижения веса стола приводит к тому, что величина обусловленного гравитацией упомянутого крутящего момента оказывается недостаточной (при некоторых режимах работы 3D-принтера) для предотвращения вибраций стола.
В другом предпочтительном примере 3D-принтер снабжен средствами, бесконтактно создающими дополнительный крутящий момент, направленный в том же направлении, что и обусловленный силами гравитации крутящий момент. Эти средства выполнены в виде магнитной системы, включающей намагниченный в вертикальном направлении постоянный магнит 43 (фиг. 1, 4 и 7), закрепленный на держателе 2 посредством консольно расположенного элемента 2001 удлиненной формы, и выполненный из магнитомягкого материала элемент 44 (якорь) удлиненной формы. При этом элемент 44 расположен параллельно плоскости 35 симметрии и закреплен на нижней поверхности подставки 4 напротив и с зазором относительно обращенного к нему полюса постоянного магнита 43.
Магнит 43 расположен симметрично относительно плоскости 38 и с той же стороны относительно направляющего элемента 37, что и упомянутая плоскость 35 симметрии стола, предпочтительно за плоскостью 35 симметрии, как показано на чертежах. Соответственно, чем больше расстояние между направляющим элементом 37 и магнитом 43 (при прочих равных условиях), тем больше величина создаваемого им крутящего момента.
Для увеличения жесткости на изгиб элемент 44 выполнен Г-образного или П-образного профиля, а его длина выбирается из условия силового взаимодействия с постоянным магнитом 43 при перемещении стола по оси Y из одного крайнего положения в другое. Что касается величины зазора между элементом 44 и обращенным к нему полюсом магнита 43, то она должна быть больше величины наклона стола (под действием крутящих моментов, обусловленных как гравитацией, так и магнитным полем) в месте расположения магнита 43.
В принципе магнит 43 может быть закреплен непосредственно на самом держателе 2 (на чертежах не показано). Однако это приведет к увеличению веса (по сравнению с описанным выше примером), а, следовательно, к увеличению инерционности. Аналогично выполнение подставки 4 стола в виде сплошной пластины из магнитомягкого материала и с размерами, равными размерам столешницы 3. Это обеспечит притягивающее взаимодействие ее с постоянным магнитом 43, но, с другой стороны, также приведет к увеличению инерционности подвижных частей 3D-принтера. Что касается элемента 44 удлиненной формы, то, при выполнении подставки 4 и столешницы 3 из магнитомягкого материала, он может быть выполнен за одно целое (фиг. 12).
На фиг. 9 показан пример выполнения 3D-принтера, в котором средства, создающие дополнительный крутящий момент, направленный в том же направлении, что и крутящий момент, обусловленный гравитацией, выполнены в виде:
- закрепленного на держателе 2 подпружиненного в вертикальном направлении и вниз шарика 45, установленного с возможностью свободного вращения, или ролика (на чертежах не показан), установленного с возможностью вращения относительно горизонтально расположенной оси;
- расположенного симметрично относительно вертикальной плоскости 38 и с той же стороны относительно направляющего элемента 37, что и вертикальная плоскость 35 симметрии столешницы 3;
- взаимодействующего с опорным элементом 46, закрепленным на подставке 4 стола параллельно вертикальной плоскости 35 симметрии столешницы 3, и имеющем длину, обеспечивающую контакт его с шариком 45 (или роликом) при перемещении стола из одного крайнего положения в другое.
В представленном на фиг. 9 примере опорный элемент 46 выполнен из профиля с противоположно отогнутыми полками, верхняя полка которого закреплена на нижней поверхности подставки 4 стола, а шарик 45 взаимодействует с верхней поверхностью нижней полки опорного элемента 46.
Как будет подробно описано ниже, при наличии люфта между ходовым 36 и направляющим 37 элементами необходимо периодически осуществлять контроль горизонтальности столешницы 3, а при необходимости - юстировку ее положения относительно подставки 4 посредством регулируемых по высоте опор 5-7.
На фиг. 10 и 11 показан другой пример воплощения изобретения. Между направляющим элементом 37 и постоянным магнитом 43 (предпочтительно по другую сторону относительно плоскости 35 симметрии) на держателе 2, например, на консольно расположенном элементе 2001 удлиненной формы, закреплен регулируемый по высоте упор 47. С возможностью свободного и беспрепятственного перемещения относительно упора 47 оперт контактный элемент 48, закрепленный на нижней поверхности подставки, параллельно плоскости 35 симметрии столешницы 3 и имеющий ту же длину, что и упомянутые выше элементы 44 и 46.
В других воплощениях патентуемого изобретения контактный элемент 48 выполнен за одно целое с подставкой 4 (фиг. 12). Упор 47 расположен симметрично относительно вертикальной плоскости 38 и в простейшем примере он выполнен в виде стойки (стержня) с нижним резьбовым участком, ввинченным в элемент 201 и скругленным по радиусу верхним концом (контактным элементом), взаимодействующим с нижней поверхностью элемента 48.
В примерах воплощения изобретения, упор 4 содержит размещенный на его верхнем конце и с возможностью свободного вращения контактный шарик 49 (фиг. 10) или размещенный с возможностью вращения на горизонтально расположенной оси контактный ролик (например, шарикоподшипник), взаимодействующий с нижней поверхностью контактного элемента 48. Благодаря размещению направляющего элемента 37 по одну сторону относительно вертикальной плоскости 35 симметрии, а упора 47 - по другую сторону плоскости 35 (вне зависимости от положения стола по оси Y) расстояние между срезом сопла 21 и расположенным под соплом 21 участком столешницы 3 будет одним и тем же по всей длине хода печатающей головки 1 даже при наличии упомянутого люфта.
Патентуемый 3D-принтер содержит также три концевых выключателя, задающих нулевое значение координат соответственно по осям X, Y и Z указанной декартовой системы координат (на фиг. 5 и 6 показан концевой выключатель 50, задающий нулевое значение координаты Z).
3D-принтер работает следующим образом.
На основе двумерного цифрового представления, соответствующего каждому слою, выделенному в формируемом изделии и расположенному горизонтально, создается задание для печати (получают данные для построения) этого слоя, иными словами, создают маршрут (трассы) перемещения печатающей головки 1 относительно верхней поверхности столешницы 3, обеспечивающей обеспечивающий изготовление из расходного материала соответствующего слоя формируемого изделия, а при необходимости и соответствующих элементов поддерживающей структуры. При использовании для изготовления как поддерживающих слоев или структур, так и формируемого изделия одного того же расходного материала, то для обеспечения легкого их удаления поддерживающие слои или структуры размещаются с зазором относительно поверхности формируемого изделия.
Кроме того, перед началом работы столешницу 3 устанавливают в ее крайнее верхнее положение, определяемое размещенным, например, на внутренней поверхности стенки 111 опорного элемента 11 каркаса, соответствующим концевым выключателем 50, задающим нулевое значение координаты Z. Затем, посредством трех регулируемых опор 5÷7 и юстировочной пластинки, выставляют столешницу 3 таким образом, чтобы при перемещении в горизонтальном положении (из одного крайнего положения в другое) как столешницы 3, так и печатающей головки 1 величина зазора между срезом сопла 21 и верхней поверхностью столешницы 3 оставалась равной толщине пластинки, иными словами, соответствовала выбранным параметрам печати.
По окончании подготовительного этапа осуществляется формирование трехмерного изделия, при этом расходный материал в виде нити из термопластичного полимерного материала через соответствующее отверстие 152, выполненное в рычаге 15 печатающей головки 1 (фиг. 7), вводится в механизм подачи нити. Нить из расходного материала подается между зубчатым колесом 12 и прижимным роликом 14, при этом в соответствии с сигналом, поступающим с блока управления на электропривод 1 (предпочтительно шаговый электродвигатель) осуществляется вращение колеса 12, связанного с его выходным валом. За счет взаимодействия нити с расположенными с двух ее противоположных сторон колесом 12 и роликом 14, осуществляется с высокой точностью перемещение ее в нагревательный блок 20, где расходный материал нагревается до текучего состояния.
Далее расходный материал экструдируется через сопло 21, а затем осаждается на верхнюю поверхность столешницы 3. Одновременно при формировании первого слоя осуществляется как перемещение печатающей головки 1 вдоль горизонтальной направляющей 23, определяющей первую ось (а именно, ось X декартовой системы координат, в которой осуществляется формирование трехмерного изделия), так и столешницы 3 по направляющему элементу 37 определяющему вторую ось Y той же системы координат. Возвратно-поступательное перемещение печатающей головки 1 вдоль горизонтальной направляющей 23 и пошаговое перемещение столешницы 3 из своего начального положения осуществляется по управляющим сигналам. Сигналы формируются процессорным блоком управления и подаются на электроприводы 24 и 39 соответственно первого и второго ременного механизма преобразования вращательного движения в прямолинейное перемещение.
По окончании этапа изготовления первого слоя формируемого трехмерного изделия (как правило, включающем построение сначала внешнего контура, а затем элементов, находящихся внутри этого контура) посредством снабженного электроприводом 31 механизма винт-гайка, осуществляется перемещение вниз столешницы 3 на высоту изготовленного первого слоя.
Этап осаждения второго и последующих слоев формируемого изделия осуществляется аналогично тому, как и описанный выше этап осаждения первого слоя, при этом имеет место наплавление расходного материала второго слоя на находящийся в твердом состоянии расходный материал первого слоя.
Благодаря патентуемому конструктивному решению, наличие люфта между ходовым 36 и направляющим 37 элементами не приводит к изменению расстояния между срезом сопла 21 и участком верхней поверхности столешницы 3, который в текущий момент времени (при формировании очередного слоя трехмерного изделия) находится над элементом 37. Вне зависимости от положения стола по оси Y, он опирается на элемент 37, положение которого в процессе формирования трехмерного изделия остается неизменным относительно вертикальной плоскости 38, в которой при возвратно-поступательном перемещении лежит ось 211 сопла 21.
Однако наличие люфта между ходовым 36 и направляющим 37 элементами приводит к обусловленному гравитацией и однозначно определенному направлению наклона стола по всей длине хода головки 1, а, следовательно, к выборке образовавшихся зазоров, являющимися причиной возникновения вибрации стола при изготовлении изделия.
Действительно, за счет упомянутого размещения элемента 37 относительно вертикальных плоскостей 35 и 38, а также выполнения ходового элемента 36 с длиной, превышающей длину хода стола в направлении оси Y на величину, которая не меньше длины направляющего элемента 37, часть стола, расположенная по одну сторону относительно направляющего элемента 37, перевешивает ту часть стола, которая расположена по другую сторону относительно направляющего элемента 37. При этом, зависящий от величины люфта, угол наклона стола по длине хода головки 1 остается неизменным при перемещении стола по оси Y. Это позволяет, при минимальных трудозатратах, посредством регулируемых опор 5-7 обеспечить неизменность расстояния между срезом сопла 21 и верхней поверхностью столешницы 3 по всей длине хода печатающей головки 1. Иными словами, отъюстировать столешницу 3 относительно подставки 4.
Таким образом, патентуемое изобретение позволяет без замены пары из ходового и направляющего элементов устранить последствия образования люфта, а, следовательно, позволяет увеличить ресурс работы 3D-принтера.
При размещении упомянутой пары элементов параллельно вертикальной плоскости 35 симметрии столешницы 3 и на расстоянии, которое не меньше 0,07 размера столешницы 3 в направлении перпендикулярном плоскости 35 симметрии, то в этом случае обеспечивается перевес одной части стола не менее чем в 1,3 раза относительно другой части. Как показали эксперименты, это обеспечивает гарантированную выборку зазоров между элементами 36 и 37 при практически важных режимах работы 3D-принтера.
Однако, как уже упоминалось выше, стремление уменьшить инерционность подвижных частей 3D-принтера путем снижения веса стола (как показали испытания) приводит к тому, что обусловленного гравитацией крутящего момента оказывается (при некоторых режимах работы 3D-принтера) недостаточно для предотвращения вибраций стола. Использование постоянного магнита 43, намагниченного в вертикальном направлении и закрепленного на держателе 2 (например, посредством элемента 2001), обеспечивает создание дополнительного крутящего момента, направленного в том же направлении, что и упомянутый выше крутящий момент, обусловленный гравитацией.
Таким образом, обеспечивается бесконтактное приложение к столу крутящего момента, величина которого достаточна как для выборки зазоров между элементами 36, 37, так и для предотвращения вибраций стола. Использование магнита 43 обеспечивает не только экономичность 3D-принтера, но небольшие габариты по сравнению с электромагнитами.
Представленный на фиг. 9 другой пример создания дополнительного крутящего момента (направленного в том же направлении, что и крутящий момент, обусловленный гравитацией), в виде подпружиненного шарика 45 (или ролика с горизонтально расположенной осью), взаимодействующего с верхней поверхностью нижней полки опорного элемента 46, закрепленного на подставке 4 параллельно плоскости 35 симметрии столешницы 3, характеризуется наличием дополнительных пар трения.
В другом примере, представленном на фиг. 10 и 11, по одну сторону относительно плоскости 35 симметрии столешницы 3 и параллельно ей размещен элемент 37, а по другую сторону относительно той же плоскости 35, размещен регулируемый по высоте упор 47, на который с возможностью свободного и беспрепятственного перемещения относительно него оперт контактный элемент 48, закрепленный на нижней поверхности подставки 4 или выполненный за одно целое с ней. В результате, наличие люфта между элементами 36, 37 приведет к тому, что вне зависимости от положения стола по оси Y, имеет место лишь прижим стола к упору 47 за счет действия крутящих моментов, а расстояние между срезом сопла 21 и расположенным под ним участком столешницы будет одним и тем же по всей длине хода головки 1. Иными словами, отпадает необходимость как в контроле горизонтальности столешницы 3, так и в ее юстировке, поскольку при перемещении стола по оси Y положение его «опорных точек» (направляющего элемента 37 и регулируемого по высоте упора 47) относительно вертикальной плоскости 38 остается неизменным.
Таким образом, обеспечивается исключение влияния люфта, обусловленного износом, по крайней мере, одного из взаимодействующих между собой ходового 36 и направляющего 37 элементов, на точность изготовления изделий.
Что касается износа элементов упора 47, то он может возникнуть только после возникновения вышеупомянутого люфта, что позволяет существенно увеличить длительность межремонтных интервалов и увеличить ресурс работы принтера. Кроме того, выполнение упора 47 регулируемым по высоте, обеспечивает существенное упрощение ремонтных работ, поскольку устранение износа сводится лишь к регулировке упора 47 по высоте.
Промышленная применимость патентуемого 3D-принтера подтверждается подробным раскрытием конструкции и возможностью изготовления устройства на существующих машиностроительных предприятиях с использованием известных материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| 3D-ПРИНТЕР | 2017 |
|
RU2649738C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ РАБОЧЕГО СТОЛА ЗD-ПРИНТЕРА | 2014 |
|
RU2567318C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ПЕЧАТАЮЩЕЙ ГОЛОВКИ ДЛЯ 3D-ПРИНТЕРА | 2014 |
|
RU2552235C1 |
| 3D-ПРИНТЕР ДЛЯ ПАРАЛЛЕЛЬНОЙ ПЕЧАТИ | 2019 |
|
RU2719528C1 |
| Способ калибровки стола 3D-принтера | 2017 |
|
RU2671374C1 |
| Пищевой 3D-принтер | 2023 |
|
RU2827097C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ С ЧИСЛОВЫМ ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2706244C1 |
| ПРОМЫШЛЕННЫЙ ОДНОПОРТАЛЬНЫЙ ОДНОПРОХОДНЫЙ ПЕСЧАНО-ПОЛИМЕРНЫЙ 3D-ПРИНТЕР | 2024 |
|
RU2838644C1 |
| СПОСОБ КАЛИБРОВКИ 3D-ПРИНТЕРА | 2021 |
|
RU2798311C2 |
| Наязвенник и способ его изготовления (варианты) | 2021 |
|
RU2774810C1 |






Изобретение относится к конструкции 3D-принтеров, работающих по FDM-технологии и может быть использовано для послойного формирования изделий на основе их трехмерного цифрового представления. Технический результат - исключение возможности возникновения вибраций стола, обусловленных люфтом вследствие износа ходового и направляющего элементов пары. Ходовой элемент выполнен с длиной, превышающей как длину направляющего элемента, так и длину хода стола на величину, которая не меньше длины направляющего элемента; торцевые стороны направляющего элемента размещены по обе стороны относительно вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла; направляющий элемент расположен параллельно и на конечном расстоянии относительно вертикальной плоскости симметрии столешницы, которая ортогональна ее боковым сторонам, расположенным перпендикулярно упомянутой горизонтальной направляющей и параллельна вертикальной плоскости, в которой лежат оси вертикальных направляющих. 9 з.п. ф-лы, 12 ил.
1. 3D-принтер, содержащий печатающую головку, держатель, стол и каркас, размещенный на корпусе процессорного блока управления послойного формирования трехмерных изделий, при этом каркас включает, по меньшей мере, одно горизонтально расположенное плоское основание, которое установлено на вертикально расположенных опорных элементах;
печатающая головка закреплена на ходовом элементе, который с возможностью скользящего продольного перемещения размещен, по крайней мере, на одной горизонтальной направляющей, которая установлена на верхней поверхности упомянутого основания и определяет первую горизонтальную ось декартовой системы координат, в которой осуществляется формирование трехмерного изделия;
печатающая головка связана с приводным ремнем первого ременного механизма преобразования вращательного движения в прямолинейное перемещение, снабженного электроприводом, держатель размещен на двух параллельных между собой вертикальных направляющих, определяющих вертикальную ось упомянутой декартовой системы координат, при этом держатель расположен перпендикулярно осям вертикальных направляющих, а упомянутые оси лежат в вертикальной плоскости, перпендикулярной упомянутой горизонтальной направляющей;
держатель размещен на упомянутых вертикальных направляющих с возможностью продольного скользящего перемещения по ним посредством снабженного электроприводом механизма винт-гайка;
верхние концы упомянутых направляющих соединены с основанием каркаса, а закрепление их нижних концов выполнено разъемным; стол содержит столешницу и подставку, при этом столешница посредством трех регулируемых по высоте опор закреплена на подставке;
на нижней поверхности подставки стола размещен ходовой элемент, установленный с возможностью скользящего продольного перемещения на направляющем элементе, который закреплен на верхней поверхности держателя и определяет вторую горизонтально расположенную ось упомянутой декартовой системы координат, при этом подставка связана с приводным ремнем второго ременного механизма преобразования вращательного движения в прямолинейное перемещение, снабженного соответствующим электроприводом;
ходовой элемент выполнен с длиной, превышающей как длину направляющего элемента, так и длину хода стола на величину, которая не меньше длины направляющего элемента;
торцевые стороны направляющего элемента размещены по обе стороны относительно вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла;
направляющий элемент расположен параллельно и на конечном расстоянии относительно вертикальной плоскости симметрии столешницы, которая ортогональна ее боковым сторонам, расположенным перпендикулярно упомянутой горизонтальной направляющей и параллельна вертикальной плоскости, в которой лежат оси вертикальных направляющих.
2. 3D-принтер по п. 1, в котором направляющий элемент размещен относительно упомянутой вертикальной плоскости симметрии столешницы на расстоянии, которое не меньше 0,07 размера столешницы в направлении, перпендикулярном ее вертикальной плоскости симметрии.
3. 3D-принтер по п. 1, в котором пара ходовой и направляющий элементы выполнена в виде шариковой линейной передачи, причем направляющая этой передачи закреплена на нижней поверхности подставки стола, а ее ползун - на верхней поверхности держателя.
4. 3D-принтер по п. 1, который содержит закрепленный на держателе и намагниченный в вертикальном направлении постоянный магнит, а также выполненный из магнитомягкого материала элемент удлиненной формы, который расположен параллельно вертикальной плоскости симметрии столешницы и закреплен на нижней поверхности подставки стола напротив и с зазором относительно обращенного к нему полюса упомянутого постоянного магнита, который расположен симметрично относительно вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла, и с той же стороны относительно направляющего элемента, что и вертикальная плоскость симметрии столешницы.
5. 3D-принтер по п. 1, в котором подставка стола выполнена из магнитомягкого материала, а на держателе симметрично относительно упомянутой вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла, и с той же стороны относительно направляющего элемента, что и вертикальная плоскость симметрии столешницы, закреплен постоянный магнит, намагниченный в вертикальном направлении, при этом напротив обращенного вверх полюса постоянного магнита и с зазором относительно него размещен выполненный за одно целое с подставкой стола элемент удлиненной формы, расположенный параллельно вертикальной плоскости симметрии столешницы.
6. 3D-принтер по п. 4 или 5, в котором постоянный магнит и упомянутый направляющий элемент расположены по разные стороны относительно вертикальной плоскости симметрии столешницы.
7. 3D-принтер по п. 6, в котором между направляющим элементом и постоянным магнитом на держателе закреплен регулируемый по высоте упор, на который с возможностью свободного перемещения относительно него оперт расположенный параллельно вертикальной плоскости симметрии столешницы контактный элемент, который или выполнен за одно целое с подставкой стола, или закреплен на нижней поверхности, при этом упор расположен симметрично относительно вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла.
8. 3D-принтер по п. 7, в котором взаимодействующая с контактным элементом часть упомянутого упора выполнена в виде шарика, закрепленного с возможностью свободного вращения.
9. 3D-принтер по п. 7, в котором взаимодействующая с контактным элементом часть упомянутого упора выполнена в виде ролика, закрепленного с возможностью вращения относительно горизонтально расположенной оси.
10. 3D-принтер по п. 1, в котором на держателе закреплен подпружиненный в вертикальном направлении и вниз шарик, установленный с возможностью свободного вращения, или ролик, установленный с возможностью вращения относительно горизонтально расположенной оси, который расположен симметрично относительно упомянутой вертикальной плоскости, в которой при возвратно-поступательном перемещении печатающей головки лежит ось ее сопла, и с той же стороны относительно направляющего элемента, что и вертикальная плоскость симметрии столешницы, а на подставке стола закреплен взаимодействующий с упомянутым шариком или роликом опорный элемент, который расположен параллельно вертикальной плоскости симметрии столешницы и имеет длину, обеспечивающую контакт с упомянутым шариком или роликом при перемещении стола из одного крайнего положения в другое.
| 3D-ПРИНТЕР | 2017 |
|
RU2649738C1 |
| US 9479667 B1, 25.10.2016 | |||
| 0 |
|
SU181398A1 | |

