Известные механизмы шагания, преимущественно для мощных экскаваторов, отвалообразователей и других землеройных мащин, включающие корпус, опорные лыжи и гидропривод, недостаточно надежны в работе.
В предлагаемом механизме шаровой щарнир каждого гидродомкрата оперт на опорную лыжу посредством промежуточной плиты, которая установлена, в свою очередь, на катках. Катки соединены между собой обоймой и имеют возможность свободного перемещения по опорной лыже, к одному из концов которой щарнирно прикреплен дополнительный гидроцилиндр, корпус которого также щарнирно закреплен на жестко связанном с корпусом механизма кронщтейне.
Такое исполнение механизма повышает его надежность.
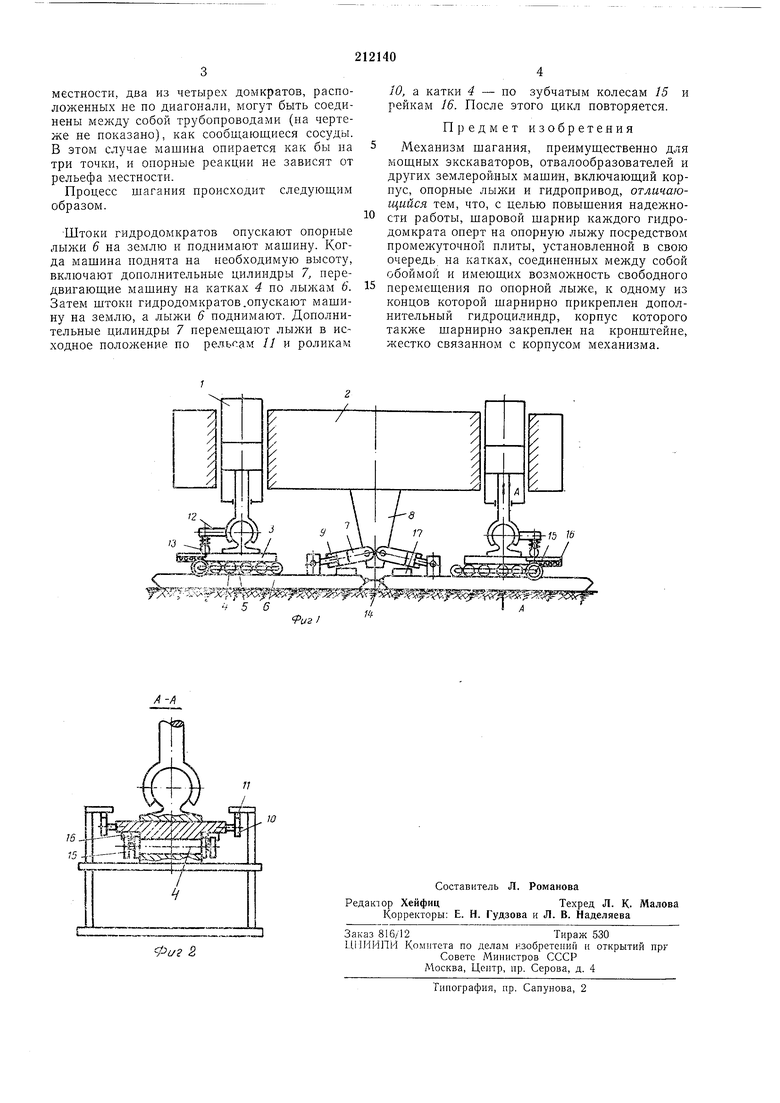
На фиг. 1 показан один из вариантов выполнения шагающего механизма, вид сбоку; на фиг. 2 - то же, разрез по Л-Л на фиг. 1.
Предлагаемый шагающий механизм вклю чает четыре гидравлических домкрата 1, жестко заделанных в корпусе 2, например, экскаватора и щарнирно соединенных с плитами 3, опертыми через свободно перекатывающиеся опорные катки 4, уложенные в обойме 5 на лыжи 6; дополнительные цилиндры 7, шарнирно соединенные с выступающим кронштейном 8 корпуса экскаватора, щтоки 9,
щарнирно соединенные с лыжами 6 обратные ролики 10, прикрепленные к плитам 3, на которые оперты рельсы // лыж во время перемещения последних.
5 Для поддержания лыж в горизонтальном положении во время экскавации, когда лыжи висят, а также во время перемещения лыж при шагании, могут быть применены кронштейны 12, жестко соединенные одним своим
0 концом со штоком гидродомкрата /, а другим концом шарнирно - с подпружиненными роликами 13, опирающимися на плиты 3. Для предотвращения разворота лыж вокруг вертикальной оси штока гидродомкрата, две лыжи
5 соединены между собой гибкой связью 14, не способной передавать поперечные силы. Для возврата катков в исходное положение, при перемещении лыж вперед, реборда одного ия катков снабжена зубчатым колесом 15, пере0мещающимся по рейкам 16, установленным на плите 3.
Для разгрузки гидродомкратов от горизонтальных усилий, возникающих при передвижении машины, цилиндры 7 можно соединить
шарнирной связью с плитой 3 (на чертеже не показано), а насосные установки 17 для их питания могут быть установлены непосредственно на лыжах 6. Для более равномерной передачи нагрузместности, два из четырех домкратов, расположенных не по диагонали, могут быть соединены между собой трубопроводами (на чертеже не показано), как сообщающиеся сосуды. В этом случае машина опирается как бы на три точки, и опорные реакции не зависят от рельефа местности.
Процесс щагания происходит следующим образом.
-Штоки гидродомкратов опускают опорные лыжи 6 на землю и поднимают машину. Когда машина поднята на необходимую высоту, включают дополнительные цилиндры 7, пере двигающие машину на катках 4 по лыжам 6. Затем штоки гидродомкратов .опускают машину на землю, а лыжи 6 поднимают. Дополнительные цилиндры 7 перемещают лыжи в исходное положение по рельсам 11 и роликам
10, а катки 4 - по зубчатым колесам /5 и рейкам 16. После этого цикл повторяется.
Предмет изобретения
Механизм шагания, преимущественно для мощных экскаваторов, отвалообразователей и других землеройиых мащин, включающий корпус, опорные лыжи и гидропривод, отличающийся тем, что, с целью повышения надежности работы, шаровой шарнир каждого гидродомкрата оперт на опорную лыжу посредством промежуточной плиты, установленной в свою очередь на катках, соединенных между собой обоймой и имеющих возможность свободного перемещения по опорной лыже, к одному из концов которой щарнирно прикреплен дополнительный гидроцилиндр, корпус которого также щарнирно закреплен на кронштейне, жестко связанном с корпусом механизма.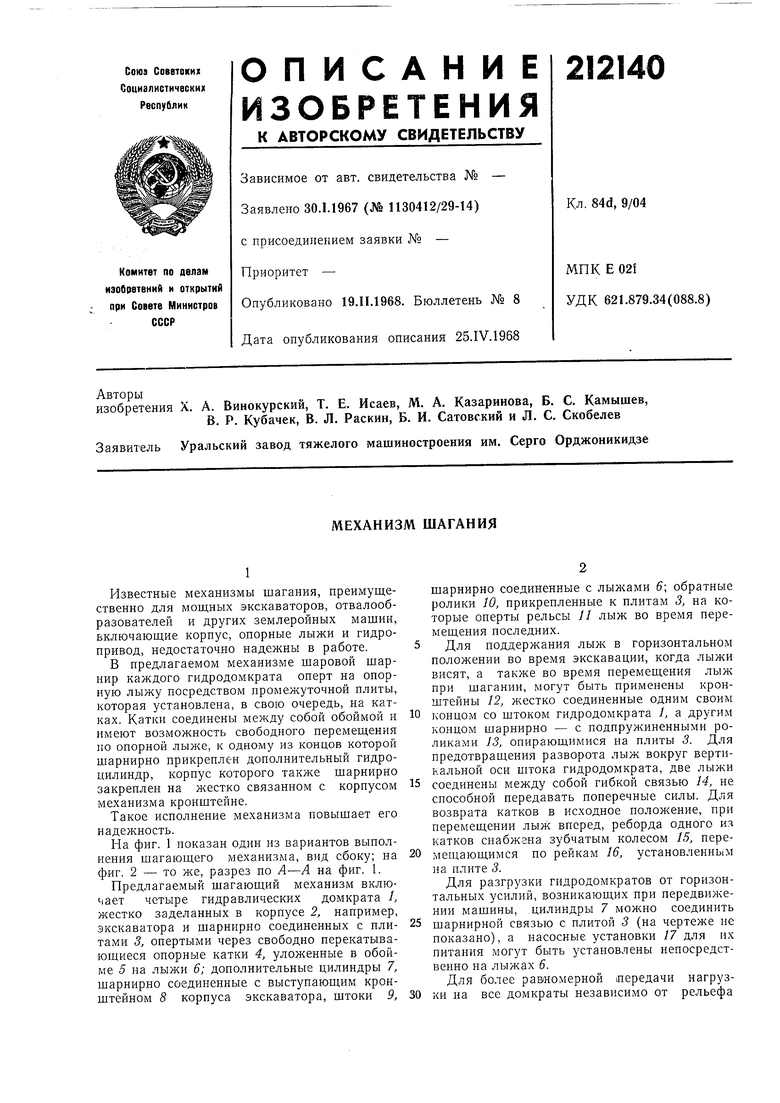
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРНОЕ УСТРОЙСТВО ШАГАЮЩЕГО ХОДОВОГО МЕХАНИЗМА | 1969 |
|
SU251484A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1971 |
|
SU293968A1 |
| УСТРОЙСТВО К МЕХАНИЗМУ ШАГАНИЯ | 1970 |
|
SU258931A1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| ОПОРНОЕ УСТРОЙСТВО ШАГАЮЩЕГО ХОДОВОГО МЕХАНИЗМА | 1972 |
|
SU354093A1 |
| ШАГАНИЯ ЭКСКАВАТОРОВ, ОТВАЛООБРАЗОВАТЕЛЕЙ И Т. П. МАШИН | 1969 |
|
SU252941A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Шагающее устройство землеройной машины | 1983 |
|
SU1121365A1 |
| ШАГАЮЩИЙ МЕХАНИЗМ ЭКСКАВАТОРА | 1972 |
|
SU435331A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 1965 |
|
SU170403A1 |
1
Риг
/7
/5 /6; j
I А
