В основном авт. св. (по заявке № 1037257/2624) описано рецепторное устройство для распознавания одноконтурных визуальных изображений на обучаемых матрицах Штайнбуха, сетчатка рецепторов которого выполнена в форме круга с радиально-круговым расположением рецепторов. Каждый рецептор содержит три выхода, а расстояния рецепторов от центра сетчатки распределены по закону возрастающей геометрической прогрессии.
Предложенное устройство отличается тем, что выходы рецепторов, расположенных в одном секторе сетчатки, объединены в сборки, выходы которых подключены к двум матрицам делителей. Выходы делителей каждой матрицы соединены с двумя сумматорами, подключенными ко входам устройств сравнения, выходы которых подключены к устройствам сдвига сетчатки относительно горизонтальной и вертикальной осей. Выходы устройств сравнения подключены к третьему устройству сравнения, соединенному с устройством вращения сетчатки, второй вход которого соединен с выходом классификатора.
Это обеспечивает повыщение точности совмещения цент)а тяжести изображения с центром сетчатки и ориентации изображения.
Выходы рецепторов сетчатки 1, расположенных в одном секторе, объединены в сборки. Бес выхода каждого рецептора соответствует расстоянию рецепгора от центра сетчатки. При одновременном возбуждении в секторе нескольких рецепторов сборка выдает сигнал, соответствующий наибольшему весу возбужденных рецепторов. В результате на вход обучаемой матрицы Штайнбуха поступает недвоичный код, описывающий контур предъявленного к распознаванию изображения.
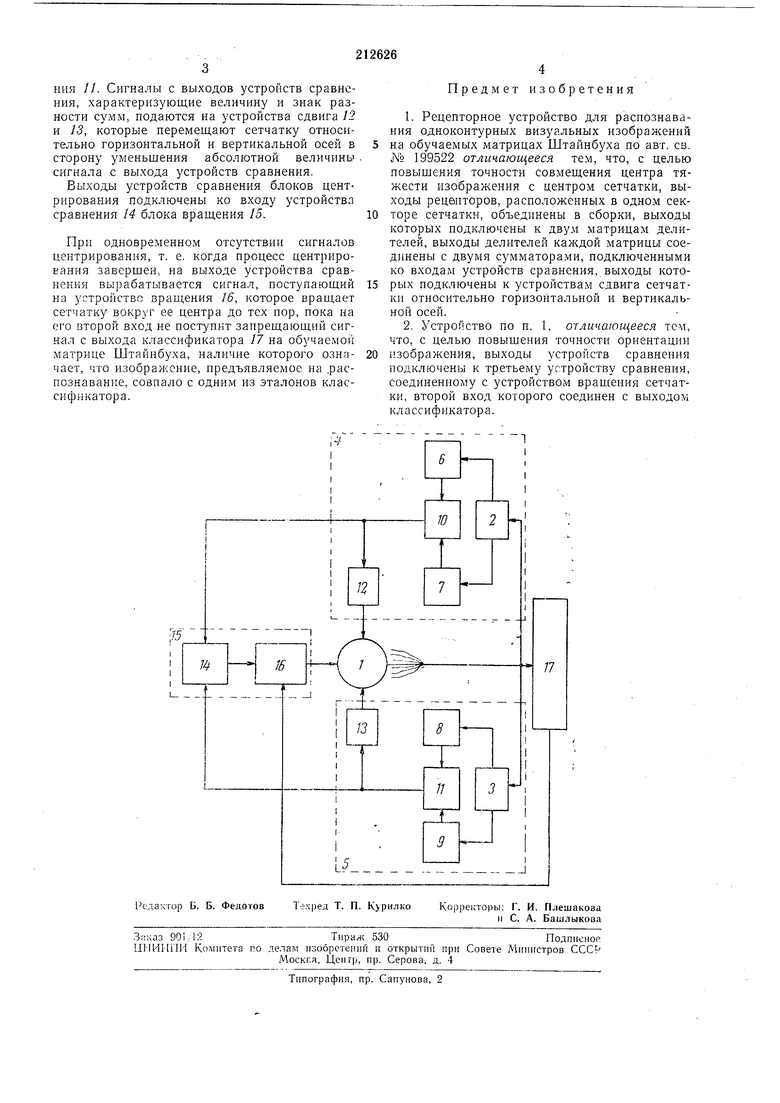
Выходы секторов сетчатки подключены к матрицам 2 и 3 делителей блоков 4 и 5 центрирования контура изображения относительно
горизонтальной и вертикальной осей. Коэффициент деления делителей пропорционален синусу (делители матрицы 2) и косинусу (деллтели матрицы 3) угла между сектором и горизонтальной осью сетчатки, благодаря чему
выходные сигналы делителей пропорциональны статическому моменту выходов секторов, относительно осей координат. Выходы делителей первого и второго квадрантов сетчатки подключены к сумматору 6, третьего и четвертого - к сумматору 7, первого и четвертого - к сумматору 8, третьего н второго - к сумматору 9 блоков центрирования. Результаты суммирования с сумматоров 6 и 7 подаются на устройство сравнения 10, а
ния }}. Сигналы с выходов устройств сравнения, характеризующие величину и знак разности сумм, подаются на устройства сдвига 12 и 13, которые неремещают сетчатку относительно горизонтальной и вертикальной осей в сторону уменьшения абсолютной величины сигнала с выхода устройств сравнения.
Выходы устройств сравнения блоков центрирования подключены ко входу устройства сравнения 14 блока вращения 15.
При одновременном отсутствии сигналов центрирования, т. е. когда процесс центрирования завершен, на выходе устройства сравнения вырабатывается сигнал, поступаюший на устройство вращения 16, которое вращает сетчатку вокруг ее центра до тех пор, пока на его второй вход не поступит запрещающий сигнал с выхода классификатора 17 на обучаемой матрице Штайнбуха, наличие которого означает, что изображение, предъявляемое на распознавание, совпало с одним нз эталонов классификатора.
Предмет изобретения
1.Рецепторное устройство для распознавания одноконтурных визуальных изображений
на обучаемых матрицах Штайнбуха по авт. св. Ль 199522 отличающееся тем, что, с целью повыо1ения точности совмещения центра тяжести изображения с центром сетчатки, выходы рецепторов, расположенных в одном секторе сетчатки, объединены в сборки, выходы которых подключены к двум матрицам делителей, выходы делителей каждой матрицы соединены с двумя сумматорами, подключенными ко входам устройств сравнения, выходы которых подключены к устройствам сдвига сетчатки относительно горизонтальной и вертикальной осей.
2.Устройство по п. 1, отличающееся тем, что, с целью повышения точности ориентации
изображения, выходы устройств сравнения подключены к третьему устройству сравнении, соединенному с устройством вращения сетчатки, второй вход которого соединен с выходом классификатора.
77
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НОРМАЛИЗАЦИИ ВЕКТОРА РАСПОЗНАВАЕМОГО ИЗОБРАЖЕНИЯ | 1967 |
|
SU204690A1 |
| СПОСОБ ВЫДЕЛЕНИЯ МАКСИМАЛЬНОГО СИГНАЛА В НЕДВОИЧНОЙ МАТРИЦЕ ШТАИНБУХА | 1967 |
|
SU203322A1 |
| ШСЕООЮЗНАЯ I ттт^шт:.т | 1973 |
|
SU374636A1 |
| Устройство для распознавания изображений | 1985 |
|
SU1339601A1 |
| Устройство для распознавания изображений | 1983 |
|
SU1267451A1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1118882A1 |
| Устройство для коррекции изображений при воздействии шумов | 1977 |
|
SU708371A1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| ОБУЧАЕМАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2068575C1 |
| ОБУЧАЕМОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1990 |
|
RU2030780C1 |
