Известны способы выделения максимального сигнала в устройствах распознавания образов, основанные на пороговом детектировании.
Предлагаемый способ отличается от известных тем, что сигнал, пропорциональный норме вектора, описывающего объект распозпавания, используют для управления порогом детекторов.
Это позволяет осуществлять оценку близости объекта распознавания с эталонами при одновременном упрощении реализующих способ устройств.
Объектами распознавания для недвоичных обучаемых матриц служат недвоичные п-мерные коды или характеристические векторы.
Л; («;,, at,,, а;„),
где Af- объект.
Эталонами служит нормированная совокупность характеристических векторов
л} - (а;, а},,а}„,
,llA-JI V%a.j //AV/-1.
Задача классификации сводится к определению
min G (Aj, Д) min |/ |( -
в м-мерном Эвклидовом пространстве характеристических векторов, где для любых двух векторов Ai и Л/ определено расстояние (At, А -однозначная, неотрицательная, действительная функция, удовлетворяющая обычным услов иям метрики.
При распознавании на входы матрицы подается объект Af. На выходе горизонтальных линеек матрицы образуются сигналы
°a 2al-«;
Нетрудно показать, что определение ттр(Л1-, Л) сводится к нахождению max з.,, то есть
минимальное расстояние между объектом распознавания и эталонами однозначно определяется по максимальному сигналу в горизонтальных линейках матрицы.
it представляет собой скалярное произведение векторов эталона и объекта распознавания
Отсюда 8ЙДНО, что наибольший сигнал а,-( вырабатывается для .того эталона, который образует наименьший-угол с вектором объекта распознавания. Следовательно, для выделения максимального сигнала Оц в качестве нороговой функции можно использовать К llAjl, где /С 1 - коэффициент, определяющий допустимую близость объекта распознавания с эталонами.
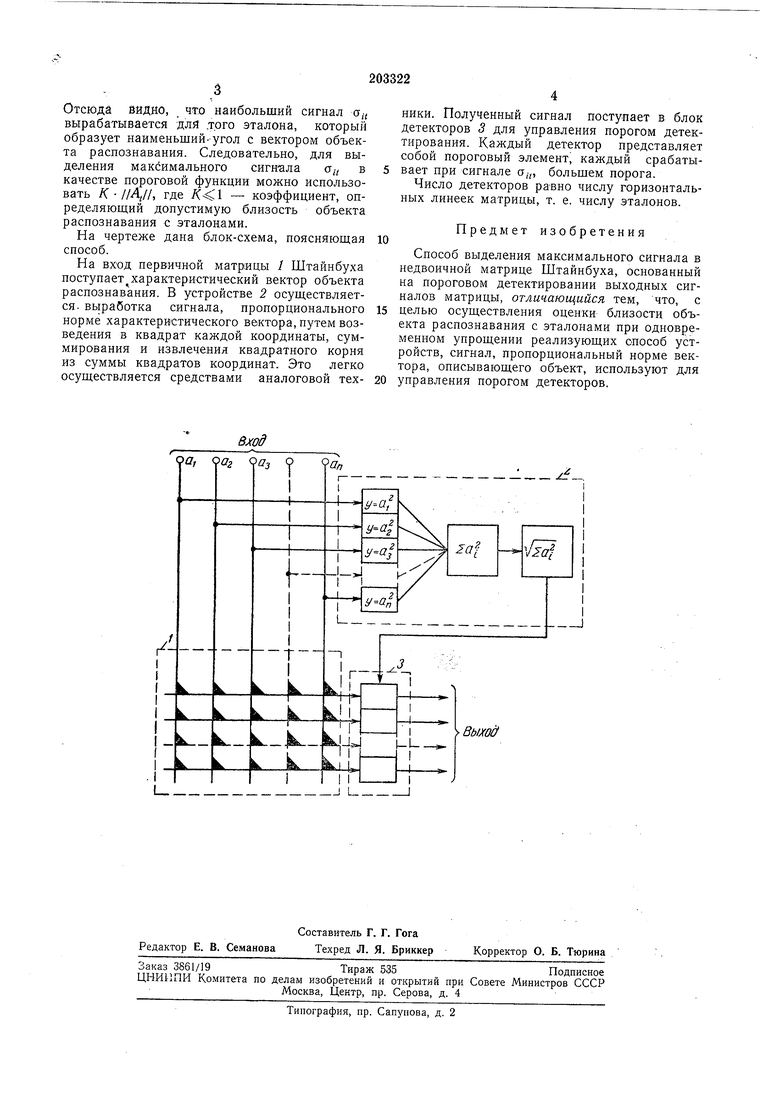
На чертеже дана блок-схема, поясняющая способ.
На вход первичной матрицы / Штайнбуха поступает характеристический вектор объекта распознавания. В устройстве 2 осуществляется. вь1работка сигнала, пропорционального норме характеристического вектора, путем возведения в квадрат каждой координаты, суммирования и извлечения квадратного корня из суммы квадратов координат. Это легко осуществляется средствами аналоговой техники. Полученный сигнал поступает в блок детекторов 3 для управления порогом детектирования. Каждый детектор представляет собой пороговый элемент, каждый срабатывает при сигнале сг,-, больщем порога.
Число детекторов равно числу горизонтальных линеек матрицы, т. е. числу эталонов.
Предмет изобретения
Способ выделения максимального сигнала в недвоичной матрице Штайнбуха, основанный на пороговом детектировании выходных сигналов матрицы, отличающийся тем, что, с
целью осуществления оценки близости объекта распознавания с эталонами при одновременном упрощении реализующих способ устройств, сигнал, пропорциональный норме вектора, описывающего объект, используют для
управления порогом детекторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕНТГЕНОГРАФИЧЕСКИЙ СЕПАРАТОР МИНЕРАЛОВ | 2019 |
|
RU2715374C1 |
| Способ адаптации антенной решетки градиентной процедурой с переменным шагом | 2021 |
|
RU2788589C1 |
| РЕЦЕПТОРНОЕ УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ | 1968 |
|
SU212626A1 |
| Способ автоматического распознавания сцен и объектов на изображении | 2021 |
|
RU2778906C1 |
| СТАЦИОНАРНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2021 |
|
RU2790954C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РЕЧЕВЫХ КОМАНД УПРАВЛЕНИЯ | 2003 |
|
RU2271578C2 |
| СПОСОБ ВЫДЕЛЕНИЯ ВЕКТОРА ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2018 |
|
RU2707710C1 |
| ОДНОСЛОЙНЫЙ ПЕРЦЕПТРОН НА ОСНОВЕ ИЗБИРАТЕЛЬНЫХ НЕЙРОНОВ | 2015 |
|
RU2597497C2 |
| Инструментальный способ обучения избирательной нейронной сети без математики и без учителя с использованием самоорганизации | 2019 |
|
RU2729878C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ ИЗВЕСТНОЙ ФОРМЫ НА ОСНОВЕ ВЕКТОРНО-КОСИНУСНОЙ МЕРЫ ПОДОБИЯ | 2021 |
|
RU2783875C1 |
