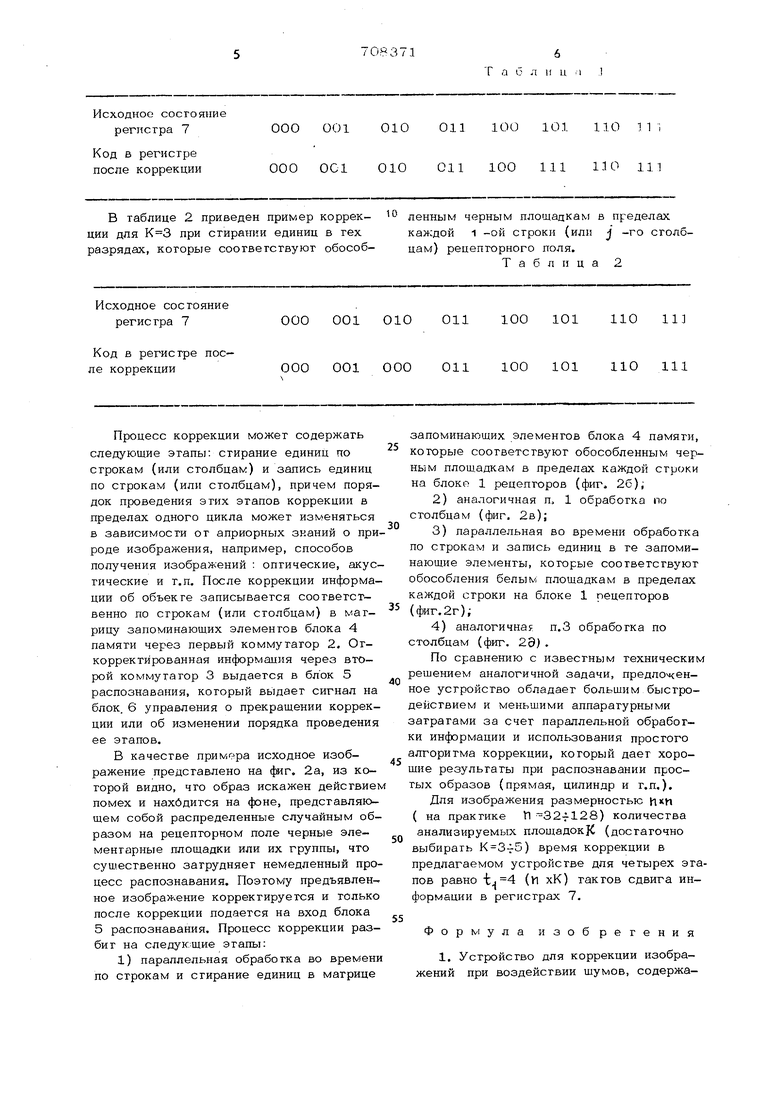
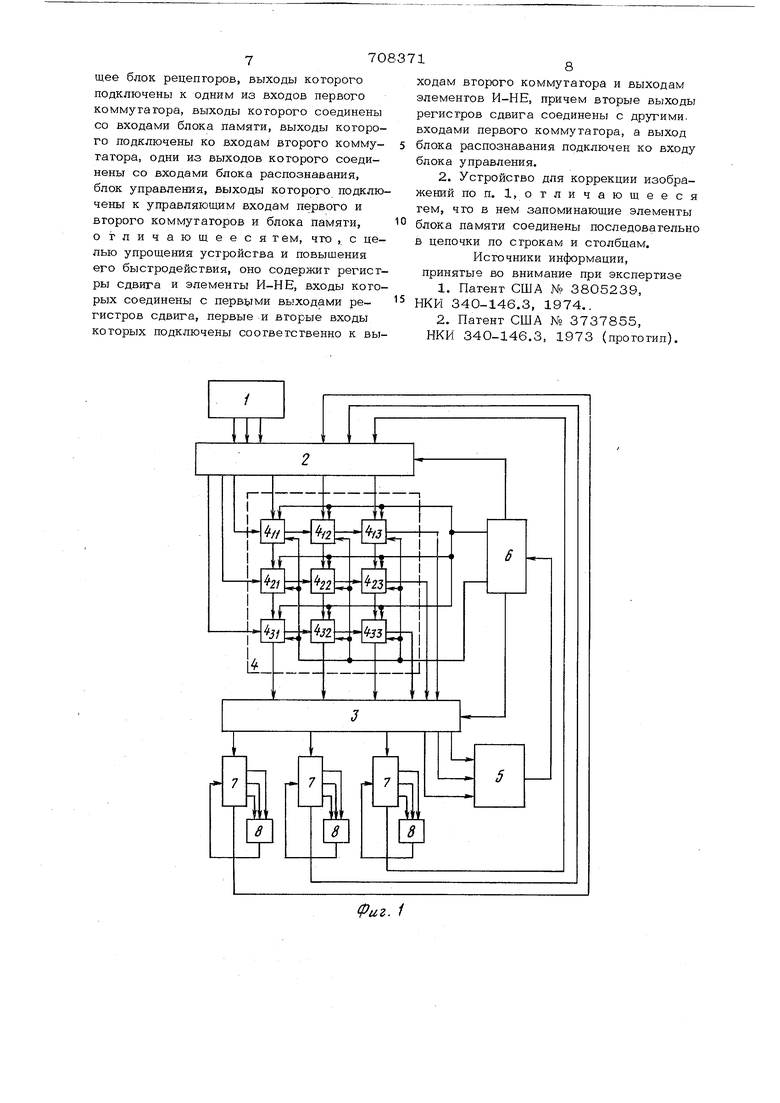
Изобретение относится к области вычисли гельной техники и может быть применено в составе специализированных быстродействующих вычислительных си стем распознавания зрительных образов в условиях действия шумов, для коррекции геометрических изображений, поступающих с рецепторного поля в реальном масштабе времени. Известно устройство для распознавания и коррекции изображений, содержащие фото электрический преобразователь, например, блок рецепторов, аналого-цифровой преобразователь, ограничитель шумов, блок памяти для запоминания плоского изображения, регистр для циркуляции изображения, арифметический блок, сумматор, дополнительный блок памяти для хранения вторичных сумм разностей, дешифратор, блок выделения признаков и блок распознавания l Недостатком известного устройства является его сложность и большой объем оборудования. Наиболее близким по технической сущности к предлагаемому является известное устройство для коррекции изображений, содержащее блок рецепторов, выходы которого подключены к одним из входов первого коммутатора, выходы которого соединены со входами блока памяти, выходы которого подключены ко входам второго коммутатора,одни из выходов которого соединены со входами блока распознавания, блок управления, выходы которого подключены к управляющим входам первого и второго KOMN-iyTaTopoB и блока памяти 2 . В известном устройстве искаженное шумами изображение образа, представляющее собой знак-букву или цифру, последовательно считывается с блока рецепторов и через первый коммутатор записывается в запоминающие элементы блока памяти, причем вначале происходит последовательная запись в запоминающие элементы первой строки матрицы, затем второй и т.д. С выхода блока памяти 37 изображение знака поступает в указанные выше блоки для сведения к минимуму нежелательных черных пятен, фона или белых пропусков в изображении. При этом происходит обнаружение границы и выделение признаков изображения - сосгояния отдельных элементарных нлошадок 1;юбрая-ения. Улучшенное изображение постунает в дополнительный блок памяти, с выхода которого изображение пос гупает через второй коммутатор в блок распос навания или через коммутаторь поступает в основной блок памяти для проведения последующей итерации коррекцпи. Итерации улучшения изображения про должаются до тех пор, пока не будет про веден последовательный просмотр всего поля изображения. После этого блок управления выдает команду на остановку цикла коррекции и записи новой информации в основной блок памяти с блока рецепторов. Величина анпертуры должна быть, с одной стороны, достаточно большой, чтобы обеспечить достоверное определение состояния исследуемой площади, а с другой стороны - следует уменьшать величину аппертуры, так как с увеличением апнертуры существенно усложняются блоки устройства. Недостатками устройства являются: большой объем аппаратурных затрат и низ кое быстродействие, обусловленное необходимостью проведения большого количества итераций для коррекцрги изображения Целью изобретения является упрощени устройства и повышение быстродействия. Это достигается тем, что устройство содержит регистры сдвига и элементы И-НЕ, входы которых соединены с первы выходами регистров сдвига, первые и вто рь(е входы которых подключены соответст венно к выходам второго коммутатора и выходам элементов И-НЕ, причем вторые выходы регистров сдвига соединены с дру гими входами первого коммутатора, а вы ход блока распознавания подключен KQ входу блока управления. Дополнительное отличие предлагаемого устройства состоит в том, что в нем запоминающие элементы блока памяти соединены последовательно в цепочки по строкам и столбцам. На фиг. 1 представлена блок-схема ус ройства; на фиг. 2а - 2Э поясняют принцип последовательной коррекции изображения. Устройство содержит блок 1 рецепторо первый коммутатор 2, второй коммутатор 14 3, блок 4 памяти, блок 5 распознавания, блок 6 управления, регистры сдвига и элементы И-НЕ 8. Выходы блока 1 рецепторов соединены со входами первого коммутатора 2, выходы которого подключены соответственно ко входам блока 4 памяти. Блок 4 памяти состоит из матрицы запоминающих элементов 4-; .которые соединены последовательно в цепочки по строкам i и по столбцам j , Выходы блока 4 памяти соединены соответственно со входами второго коммутатора 3, одни из выходов которого соединены со входами блока 5 распознавания, подключенного выходом КС входу блока 6 управления, выходы которого соединены со входами первого 2 и второго 3 коммутаторов и блока 4 памяти. Другие выходы второго коммутатора соединены черечЗ регистры 7 с соответствующими входами первого коммутатора 2. Выходы регистров 7 через соответствующие элекгенты И-НЕ 8соединены с другими входами тех же регистров 7. Устройство работает следующим образом. Искаженное шумами изображение образа, представленное на блоке 1 рецепторов, записывается в матрицу запоминающих элементов блока 4 памяти через первый коммутатор 2. За время предъявления одного кадра в устройстве происходит сравнение состояния каждой элементарной площади рецепторного поля с окружающими ее элементарными площадками с каждой стороны, по горизонтали и по вертикали, причем сравнение производится сначала по строкам, а затем по столбцам, и в процессе сравнения принимается решение об изменении состояния или о его сохранении. Каждая элементарная площадка может иметь только два состояния, т.е. быть черной или белой, что можно соответственно представить как 1 или О. По сигналам блока 6 управления в матрице запоминающих элементов осуществляется сдвиг информации об объекте одновременно по всем строкам или столбцам и выдача этой информации через второй коммутатор 3 на регистры 7. Каждые К элементарньк площадок анализируются с помощью элементов И-НЕ 8 и принимается решение с коррекции средней площадки на регистрах 7. В таблице 1 приведен пример коррекции для К-3 при записи единиц в те разряды, которые соответствуют обособленным белым площадкам в пределах каждой -1 - ой строки (или j-гостолбц. Исходное сосгояние регистра 7ООО ОО1 010 Код в регистре после коррекции000 ОС 010 В таблице 2 приведен пример коррекции для при стирании единиц в тех разрядах, которые соответствуют обособИсходное состояние регистра 7000 001 Код в регистре после коррекции000 001
Г а б л и ц п Oil 100 1О1 110 111 Oil 100 111 130 in ленным черным площадкам в пределах каждой 1 -ой строки (или j -го столбцам) репепторного поля. Таблица 2 010 011 100 101 110 11 000 011 100 101 110 111
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции изображений при воздействии шумов | 1981 |
|
SU997056A2 |
| Устройство для распознавания образов | 1976 |
|
SU650087A1 |
| Устройство для редактирования | 1982 |
|
SU1117669A1 |
| Устройство для обработки изображений | 1986 |
|
SU1316003A1 |
| Устройство для отображения и хранения информации телевизионного изображения | 1981 |
|
SU1277910A3 |
| Устройство для измерения периметра объектов | 1981 |
|
SU1101674A1 |
| Устройство для распознавания контуров изображений | 1983 |
|
SU1156103A1 |
| Многоканальный фотометр | 1987 |
|
SU1492224A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2054196C1 |
Процесс коррекции может содержать следующие этапы: стирание единиц по строкам (или столбцам) и запись единиц по строкам (или столбцам), причем порядок проведения этих этапов коррекции в пределах одного цикла может изменяться в зависимости от априорных знаний о природе изображения, например, способов получения изображений : оптические, акустические и т.п. После коррекции ин4юрмации об объекте записывается соответственно по строкам (или столбцам) в матрицу запоминающих элементов блока 4 памяти через первый коммутатор 2. Откорректированная информация через второй коммутатор 3 выдается в блок 5 распознавания, который выдает сигнал на блок. 6 управления о прекращении коррекции или об изменении порядка проведения ее этапов.
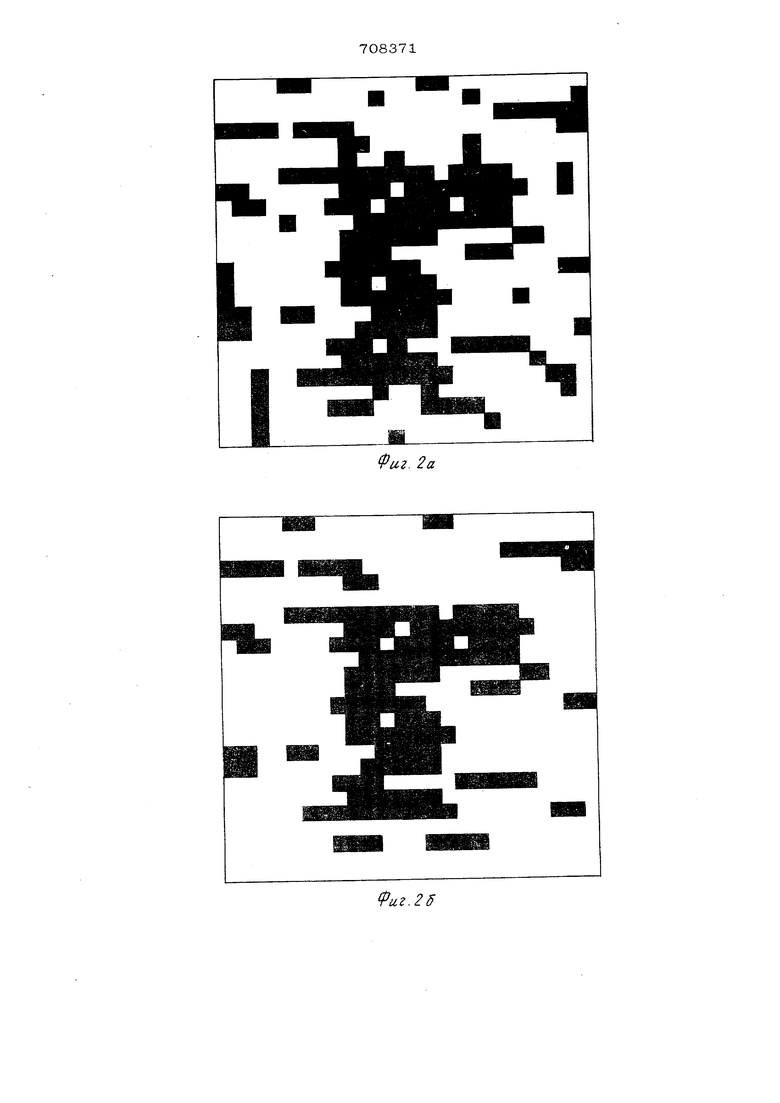
В качестве примера исходное изображение представлено на фиг. 2а, из которой видно, что образ искажен действием помех и нахбдится на фоне, представляющем собой распределенные случайным образом на рецепторном поле черные элементарные площадки или их группы, что суш.ественно затрудняет немедленный процесс распознавания. Поэтому предъявлен ное изображение корректируется и только после коррекции подается на вход блока 5 распознавания. Процесс коррекции разбит на следующие этапы:
1) параллельная обработка во времени по строкам и стирание единиц в матрице
запоминающих элементов блока 4 памяти, которые соответствуют обособленным черным площадкам в пределах каждой строки на блоке 1 рецепторов (фиг. 26),
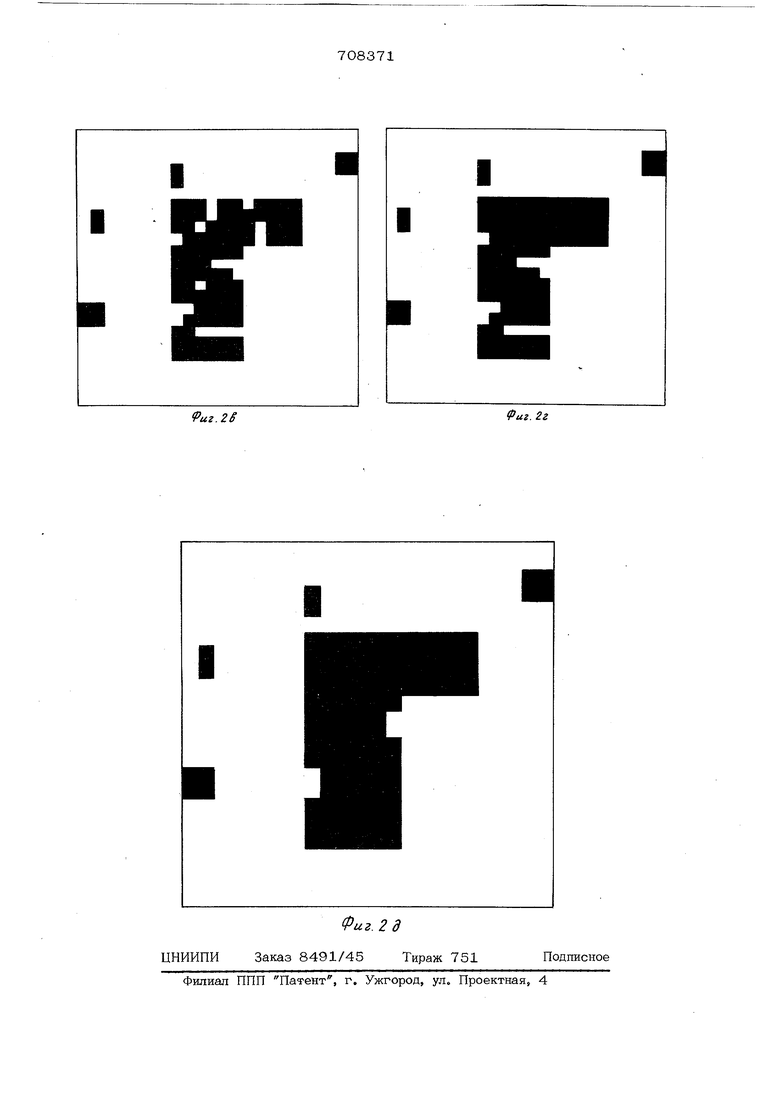
2)аналогичная п. 1 обработка по столбцам (фиг. 2в);
3)параллельная во времени обработка по строкам и запись единиц в те запоминающие элементы, которые соответствуют обособления белым площадкам в пределах каждой строки на блоке 1 рецепторов (фиг.2г);
4)аналогичная п.З обработка по столбцам (фиг. 29) .
По сравнению с известным техническим решением аналогичной задачи, предлохенное устройство обладает большим быстродействием и меньшими аппаратурными затратами за счет параллельной обработки информации и использования простого алгоритма коррекции, который дает хорошие результаты при распознавании простых образов (прямая, цилиндр и т.п.). Для изображения размерностью (щи ( на практике Y 32-fl28) количества анализируемых площадокК (достаточно выбирать К 34-5) время коррекции в предлагаемом устройстве для четырех этапов равно (П хК) тактов сдвига информации в регистрах 7.
Формула изобретения
Риг. 2S
Фаг. 2г
