Изобретение относится к упаковочной технике и может быть применено в автоматах и машинах, производящих упаковку любых сыпучих веществ в однослойные открытые бумажные и полиэтиленовые мешки с фальцем и без фальца, а также в многослойные открытые бумажные мешки с поперечной точечной склейкой слоев мешка в верхней части.
Известны подобные устройства, включающие вакуум-присосы, приводной рычаг, вакуум-кран и привод.
Цель изобретения - увеличить производительность, надежность и упростить управление.
Достигается это тем, что механизм выполнен односторонним, в виде качающегося на оси приводного рычага, на конце которого шарнирно установлена снабженная опорной планкой группа вакуум-присосов, а привод механизма осуществлен через подпружиненный корпус вакуум-крана, ось которого жестко закреплена на приводном рычаге.
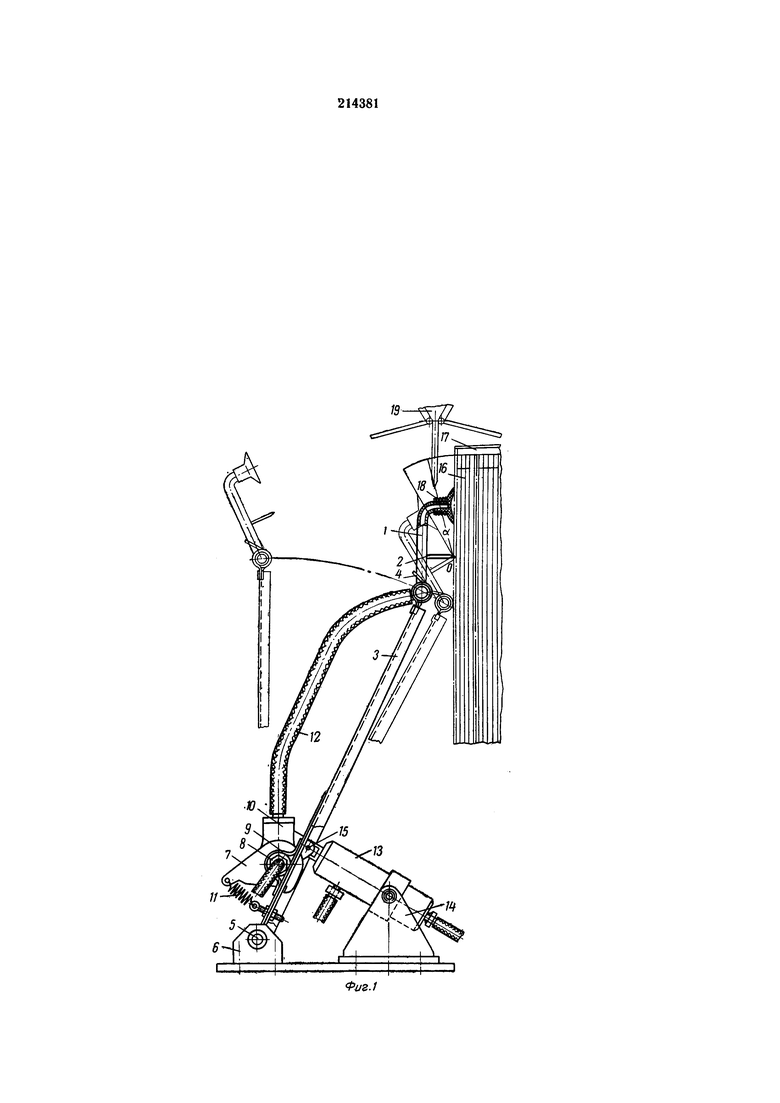
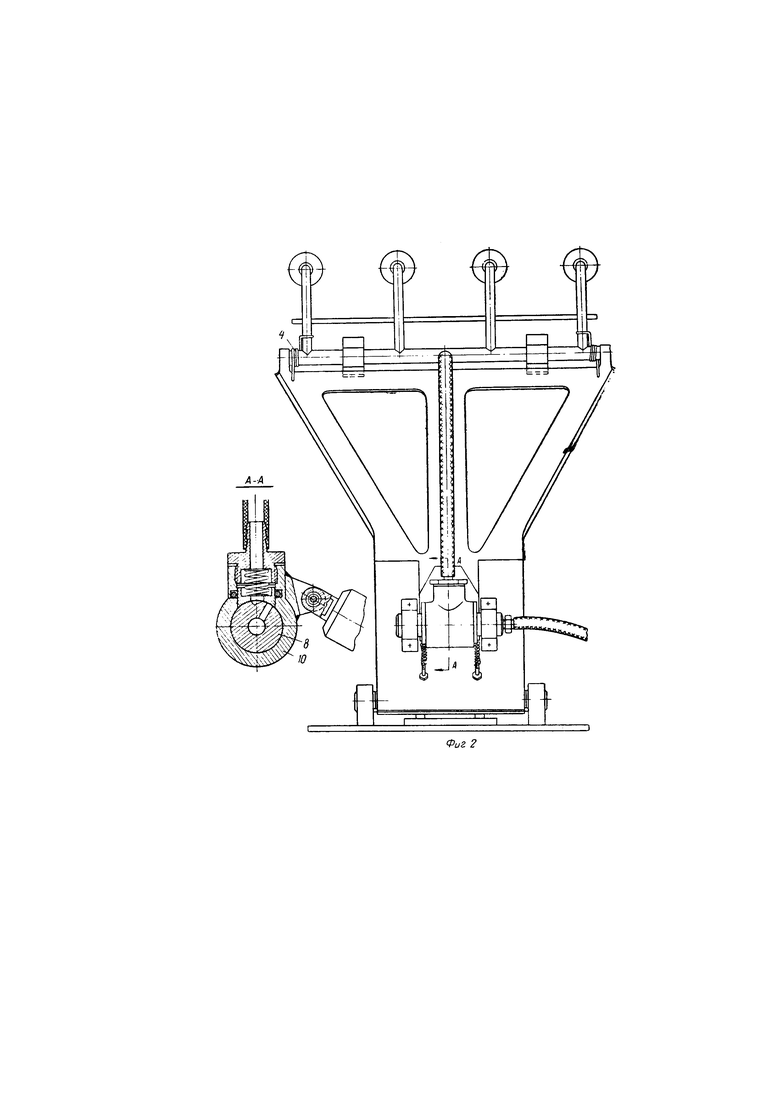
На фиг. 1 и 2 изображен механизм предварительного раскрытия бесклапанных мешков.
Основными рабочими органами механизма предварительного раскрытия бесклапанных мешков являются: группа вакуум-присосов 1 с опорной планкой 2, установленная шарнирно на приводном рычаге 3 и подпружиненная пружинами кручения 4, приводной рычаг 3, крепящийся осью 5 в подшипниках стоек 6, вакуум-кран 7, крепящийся за ось 8 скобами 9, корпус 10 которого подпружинен пружинами 11 и соединен с группой вакуум-присосов прорезиненным рукавом 12, рабочего органа (гидроцилиндра) 13, установленного шарнирно на стойках 14 и соединенного осью 15 с корпусом вакуум-крана.
Механизм работает следующим образом. Гидроцилиндр 13, начиная работу, поворачивает приводной рычаг 3 на оси 5 и подводит группу вакуум-присосов 1 к мешкам 16, уложенным в магазин 17. Когда опорная планка 2 и присосы 18 прижмутся к мешку, приводной рычаг 3 останавливается, но цилиндр 13, продолжая работу, растягивает пружины 11, поворачивает корпус 10 вакуумного крана 7 относительно жестко закрепленной на приводном рычаге оси 8 и соединяет вакуумную полость а крана с полостью b подвода вакуума к присосам. Создавшийся в полостях присосов вакуум присасывает мешок. Когда жесткий упор корпуса крана дойдет до опорной плоскости приводного рычага 3, который еще будет продолжать свое движение в направлении к мешку, группа вакуум-присосов начнет поворачиваться относительно точки соприкосновения О. Присосы отклоняются на угол α, а вместе с ним и отклоняется передний слой мешка (предварительно раскрываясь) и удерживается в этом положении до снятия вакуума с присосов.
Механизм 19 окончательного раскрытия мешка входит своими внутренними губками в мешок, после чего шток гидроцилиндра начинает обратный ход. При этом пружины 4 возвращают группу вакуум-присосов в положение, параллельное мешкам, находящимся в магазине. Пружины 11, поворачивая корпус 10 относительно оси 8 вакуум-крана 7, соединяют полость b присосов с атмосферой, и механизм отходит от мешков. Механизм 19 окончательного раскрытия мешка своей левой наружной губкой захватывает переднюю половину мешка и вытаскивает его из магазина. Затем цикл работы повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раскрывания полимерных мешков | 1973 |
|
SU442961A1 |
| МЕХАНИЗМ ПРЕДВАРИТЕЛЬНОГО РАСКРЫТИЯ МНОГОСЛОЙНЫХ БЕСКЛАПАННЫХ МЕШКОВ | 1966 |
|
SU179663A1 |
| МАГАЗИН ДЛЯ БУМАЖНЫХ МЕШКОВ К УПАКОВОЧНЫММАШИНАМ | 1969 |
|
SU242731A1 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
| Устройство для закрывания крупногабаритных мешков | 1979 |
|
SU791214A3 |
| Устройство для раскрывания клапанных мешков | 1975 |
|
SU579890A3 |
| Устройство для поштучного захвата мешков и подачи их к расфасовочной машине | 1973 |
|
SU441204A1 |
| Устройство для упаковки сыпучего материала в клапанные мешки | 1982 |
|
SU1113308A1 |
| Устройство для растаривания мешков с сыпучими материалами | 1973 |
|
SU483313A1 |
| Устройство для сбора половы в мягкие контейнеры | 2022 |
|
RU2788129C1 |
Механизм предварительного раскрытия бесклапанных мешков, включающий вакуум-присосы, приводной рычаг, вакуум-кран и привод, отличающийся тем, что, с целью увеличения производительности, надежности и упрощения управления, механизм выполнен односторонним, в виде качающегося на оси приводного рычага, на конце которого шарнирно установлена подпружиненная, снабженная опорной планкой группа вакуум-присосов, а привод механизма осуществлен через подпружиненный корпус вакуум-крана, ось которого жестко закреплена на приводном рычаге.
