Изобретение относится к подъемно-транспортному машиностроению, в частности к манипуляторам, нредназначенным для механизированной загрузки конвейера менжа- ми с сынучим грузом (мука, комбикорм, сахар и т.д.), нанример, при разгрузке железнодорожных вагонов.
Цель изобретения - новьипение надежности захвата мешковых грузов и повьине- ние производительности.
На фиг. 1 изображен манипулятор, вид в плане; на фиг. 2 - вид А на фиг. 1 (манипулятор в момент захвата мешка); на фиг. 3 захватная головка манипулятора в начале движения ее за очередным мешком; на фиг. 4 - установка манипулятора на носовой части телескопического, поворотного в горизонтальной и вертикальной плоскостях, передвижного конвейера.
Манипулятор для загрузки конвейера меа1ковыми грузами состоит из рамы L на которой смонтирован гидропривод захватной головки, состоящий из электродвигателя 2, соединенного с масляным насосом 3, предохранительного клапана 4, распределительного золотника 5 с электромагнитом 6, масляного бака 7, на котором установлен привод в виде гидроцилиндра 8, и системы трубопроводов 9-15.
Механизм подачи меижовых грузов выполнен в виде многозвенного п арнирного параллелограмма (фиг- 2) и имеет привод от поршневого штока 19 гидроцилиндра 8. Поршневой шток 19 посредством вилки 20 и пальца 21 ;царнирно соединен с головкой рычага 22. Последний жестко соединен с валом 23, на котором также жестко закреплен рычаг 24 с прорезью 25. В прорези 25 рычага 24 помещен кольцевой шарнир 26 раздвижного параллелогра.мма. Концевой шарнир 26 тягами связан с направляющими роликами 27, установленными с возможностью перемещения по пазам 28 стойки 29, закрепленной на раме 1. Раздвижной параллелограмм 16-18 снабжен опорными роликами 30 и 31, которые имеют возможность перекатываться по направ.ляющим 32 рамы 1. Раздвижной параллелограмм 16-18 соединен с захватной головкой 33, состоящей из верхней 34 и нижней 36 челюстей.
На раме 1 смонтирована криволинейная направляющая Зб, служащая для раскрытия верхней челюсти 34. Направляющая 36 снабжена опорным болтом 37, с помощью которого обеспечивается раскрытие нижней челюсти 35. Свободный конец нижней челюсти 35 выполнен в виде ромба.
Захватная головка 33 шарнирно соединена с раздвижным параллелограммом 16 - 18 посредством тяг 38 и 39. Верхняя челюсть 34 захватной головки установлена на оси 40. Свободный конец рычага верхней челюсти 34 снабжен роликом 41. Челюсть 34 зажимает мешки 42 с помощью пружины
43. На оси 40 верхней челюсти 34 захватной головки установлена поворотная защелка 44, верхний свободный конец которой снабжен роликом 45.
5 Защелка 44 обеспечивает удержание нижней челюсти 35 в горизонтальном положении при подходе головки к очередному мещку, его захвате и транспортировке на транспортер. Тяги 39 снабжены проп резями 46, которые обеспечивают поворот захватной головки 33 горизонтально к полу при взятии мешка с днища вагона. Для установки манипулятора на кронштейне 47 конвейера рама 1 снабжена проушиной 48. Захватная головка 33 (фиг. 1) состоит
5 из двух щек 49 и 50, между которыми расположены ось 40 поворота защелки 44 и верхней челюсти 34, ось 51 поворота нижней челюсти 35, ось 52, на которой закреплен профилированный кулачок 53, ось 54 крепления нижних концов пружин 43, пружина 55,
прижимающая защелку 44 к упору 56 и задерживающая ее в вертикальном положении, упор 57, удерживающий нижнюю челюсть 35 в горизонтальном положении. Челюсть 35 свободно посажена на оси 51 и прижима5 ется к упору 57 пружиной 58 кручения. Профилированный кулачок 53 свободно посажен на оси 52 и прижимается к упору 59 пружиной 60 кручения. Верхняя челюсть 34 снабжена опорным роликом 61.
В нижней части захватная головка 33
0 снабжена упорной планкой 62 с толкателем 63. При вертикальном положении кулачка 53 его хвостовик 64 воздействует на конечный выключатель 65. На щеках 49 и 50 захватной головки установлена направляю- тая лыжа 66 с прорезью 67 для прохода верх5 ней челюсти 34. Передний конец верхней челюсти 34 снабжен диском 68. На его оси 69 с возможностью свободного поворота закреплена щайба 70.
Кронштейн 47 (фиг. 4) закреплен на носовой части телескопического конвейера 71. На оси 72 кронштейна установлена с возможностью ограниченного поворота рама 1. Кронщтейн снабжен сидением 73, на котором может располагаться оператор с переносным нультом управления конвейером. Кон5 вейер 71 установлен с возможностью перемещения в вертикальной плоскости посредством гидроцилиндра 74, а посредством гидроцилиндра 75 - в горизонтальной плоскости относительно второй ступени 76 многоступенчатого конвейера.
0 Рама 1 снабжена упорами 77 и 78. Кронштейн 47 снабжен ограничителями 79, ограничивающи.ми поворот манипулятора вокруг оси 72.
Манипулятор для загрузки конвейера мещковыми грузами работает следующим
.5 образом..
Онератор с перерюсного пульта управления, включив гидростанцию, подводит носовую часть телескопического конвейера к
0
очередному мешку. При сбросе предыдущего мешка верхняя челюсть 34 захватной головки открыта. При подходе захватной головки 33 к мешку направляюш,ая лыжа 66 скользит по мешку, направляет нижнюю челюсть 35 под мешок.
При дальнейшем движении захватной головки вперед мешок упирается в упорную планку 62. Толкатель 63 нажимает на нижнюю часть профилированного кулачка 53, который поворачивается против часовой стрелки и освобождает опорный ролик 61. рычага верхней челюсти 34. Под действием пружины 43 верхняя челюсть опускается на мешок и зажимает его, взаимодействуя с головкой нижней челюсти 35. При выходе кулачка 53 из-под ролика 61 и опускании верхней челюсти 34, ролик 61 заставляет кулачок 53 дополнительно повернуться против часовой стрелки.
Хвостовик 64 кулачка 53 освобождает штифт конечного выключателя 65, благодаря чему обеспечивается подача импульса на электромагнит 6 распределительного золотника 5, который обеспечивает реверс гидроцилиндра 8. Поршень гидроцилиндра идет влево, обеспечивая поворот рычага 24 против часовой стрелки, а следовательно, пе- ремеш,ение захватной головки с мешком вправо.
При натаскивании мешка на конвейер в конце хода захватной головки ролик 41 рычага верхней челюсти 34 идет по направляющей 36, поворачивая верхнюю челюсть по часовой стрелке. При этом, когда ролики 61 освобождают кулачок 53, последний за счет пружины 60 поворачивается против часовой стрелки, занимая исходное вертикальное положение. До поворота кулачка 53 в вертикальное положение ролик 45 защелки 44 упирается в упорный болт 36. Защелка 44 поворачивается против часовой стрелки и освобождает нижнюю челюсть 35, которая, поворачиваясь под тяжестью мешка, сбрасывает последний на ленту конвейера, ролик 41 достигает своего низщего положения под направляющей 36. Ролик 61, поднимаясь, освобождает кулачок 53. Последний под действием пружины 60 занимает свое исходное положение.
Хвостовик 64 кулачка нажимает на штифт конечного выключателя 65, чем обеспечивается подача импульса электромагниту 6 распределительного золотника, который осуществляет реверс гидроцилиндра. Захватная головка 33 идет снова вперед. При
выходе ролика 41 из-под направляющей 36, ролик 61 рычага -верхней челюсти опускается на кулачок 53 и верхняя челюсть остается открытой. Нижняя челюсть 35 при движении захватной головки вперед, освободившись от мещка за счет пружины 58, поворачивается по часовой стрелке. При этом правый конец челюсти обжимает защелку 44 и упирается в упор 57. Защелка 44 за счет
пружины 55 занимает вертикальное положение, -упираясь в упор 56, и удерживает нижнюю челюсть в горизонтальном положении.
Захватная головка движется к очередному мещку. За время движения захватной
головки с мешком по конвейеру и обратно, оператор обеспечивает подвод носовой части телескопического конвейера к очередному мешку.
20
Формула изобретения
Манипулятор для загрузки конвейера Мешковыми грузами, включающий поворотный в горизонтальной и вертикальной плоскостях телескопический конвейер и механизм
5 подачи мешковых грузов на конвейер, отличающийся тем, что, с целью повыщения надежности захвата мешковых грузов и повышения производительности, механизм подачи Мешковых грузов выполнен в виде приводного многозвенного шарнирного парал0 лелограмма, шарнирно установленного на раме телескопического конвейера с возможностью ограниченного поворота в вертикальной плоскости и снабженного подвижной захватной головкой, выполненной в виде двух щек с укрепленной на ней в верхней части
5 направляющей лыжей с прорезью и двух подпружиненных поворотных по вертикали верхней и нижней челюстей, верхняя из которых установлена с возможностью прохода через прорезь лыжи и снабжена опорным роликом, при этом захватная головка снабжена конечным выключателем управления приводом многозвенного щарнирного параллелограмма, подпружиненным профильным кулачком, установленным с возможностью взаимодействия с конечным выключателем
5 и опорным роликом верхней челюсти, и упорной планкой с толкателями, установленными с возможностью взаимодействия соответственно с гружеными мещковыми грузами и подпружиненным профильным кулачком, причем свободный нижней челюсти выполнен в виде ромба.
0
68
J4
6S
пгг в /J,
J9 22
7
гз
сриг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для переворачивания сыра во время его созревания | 1984 |
|
SU1232189A1 |
| Устройство для перегрузки затаренных мешков | 1987 |
|
SU1532466A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Автоматическая литейная линия | 1985 |
|
SU1416269A1 |
| Устройство для образования попереч-НыХ шВОВ HA ТЕРМОСВАРиВАЕМыХ РуКАВАХи ОТРЕзАНия гОТОВыХ пАКЕТОВ | 1979 |
|
SU806540A1 |
| Устройство для поштучной выдачи грузов с конвейера | 1990 |
|
SU1803374A1 |
| Автоматическая поточная линия для изготовления книг | 1986 |
|
SU1426848A1 |
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ ПЛЕТЕНОЙ ТЕСЬМЫИЗ ПРЯДЕЙ | 1972 |
|
SU352978A1 |
| Устройство для завертывания прямоугольных предметов | 1981 |
|
SU977287A1 |

Изобретение относится к подъемно- транспортному машиностроению и позволяет повысить надежность захвата мешко- вых грузов и производительность манипулятора. Он включает поворотный в горизонтальной и вертикальной плоскостях телескопический конвейер и механизм подачи Мешковых грузов на конвейер в виде приводного многозвенного шарнирного параллелограмма. Он установлен на раме конвейера с возможностью ограниченного поворота в вертикальной плоскости и снабжен подвижной захватной головкой (ЗГ). Она выполнена в виде двух щек и двух подпружиненных поворотных по вертикали верхней 34 и нижней 35 челюстей. В верхней ее части на ЗГ укреплена направляющая лыжа 66 с прорезью 67 для прохода челюсти 34. Свободный конец челюсти 35 выполнен в виде ромба, а челюсть 34 снабжена опорным роликом 61. Также ЗГ снабжена конечным выключателем 65 управления приводом параллелограмма, подпружиненным профильным кулачокм 53 и упорной планкой 62 с толкателями 63. При подходе ЗГ к мешку лыжа 66 скользит по мешку и направляет челюсть 35 под мешок. При дальнейшем движении ЗГ вперед мешок упирается в упорную планку 62, толкатель 63 нажимает на нижнюю часть кулачка 53, который поворачивается против часовой стрелки и освобождает опорный ролик 61 челюсти 34. Челюсть 34 опускается на мешок и зажимает его, взаимодействуя с головкой челюсти 35. Кулачок 53 освобождает конечный выключатель 65, что обеспечивает реверс привода параллелограмма и перемещение ЗГ с мешком вправо. 4 ил. 37 & W оо 05 СО 4: СО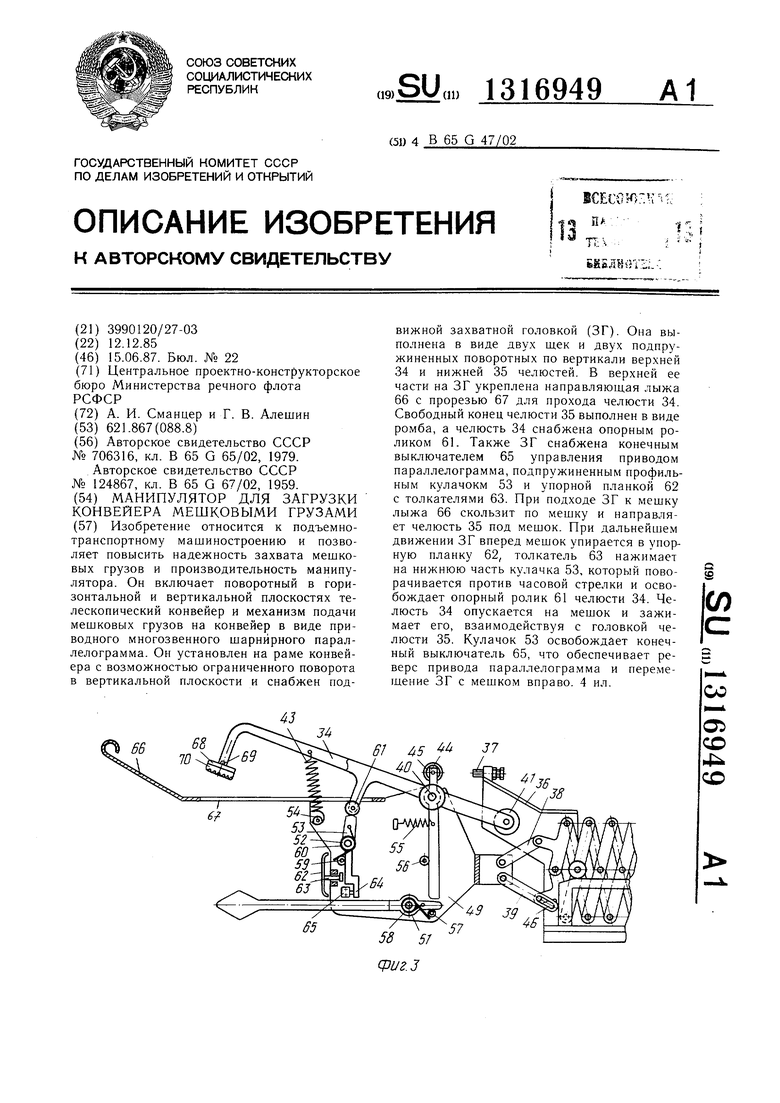
J 4J
,6В
47
7/
7
сригА
Составитель Б. Толчанов
Редактор И. КасардаТехред И. ВересКорректор И. Патай
Заказ 2289/19Тираж 777Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
I 13035, Москва, Ж-ЗГз, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Навесное погрузочное оборудование к транспортному средству | 1978 |
|
SU706316A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для выгрузки затаренных мешков из железнодорожных вагонов | 1959 |
|
SU124867A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
