Известны устройства для автоматической стабилизации скорости ленты, приводимой в движение электродвигателем, преимущественно для лентопротяжных механизмов, содержащие полупроводниковый усилитель в цепи питания двигателя; управляемый в зависимости от отклонения скорости от заданного значения при помощи тахогенератора на валу двигателя.
Но эти устройства не обеспечивают стабилизации при воздействии перегрузок, особенно низкочастотных (до 12 гц), которые вызывают дополнительные моменты от инерционных сил или сил трения в опорах вращающихся деталей механизма. Колебания скорости ленты при этом часто достигают недопустимых величин, так как маховики и резино-металлические амортизаторы на низких частотах малоэффективны. К тому же, стабилизирующее воздействие создается с определенным запаздыванием, вызванным электромеханической постоянной времени, и только после отклонения скорости. Для восстановления скорости приходится преодолевать инерционность механизма.
Предлагаемое устройство отличается от известных тем, что в нем использованы электрические вибродатчики. На вход усилителя подключен дополнительный усилитель, управляемый через выпрямитель, сумматор и установочное сопротивление выходными сигналами датчиков. В ведущем электродвигателе создается компенсирующий момент, равный дополнительному моменту трений, но направленный противоположно.
Это позволяет повысить надежность устройства.
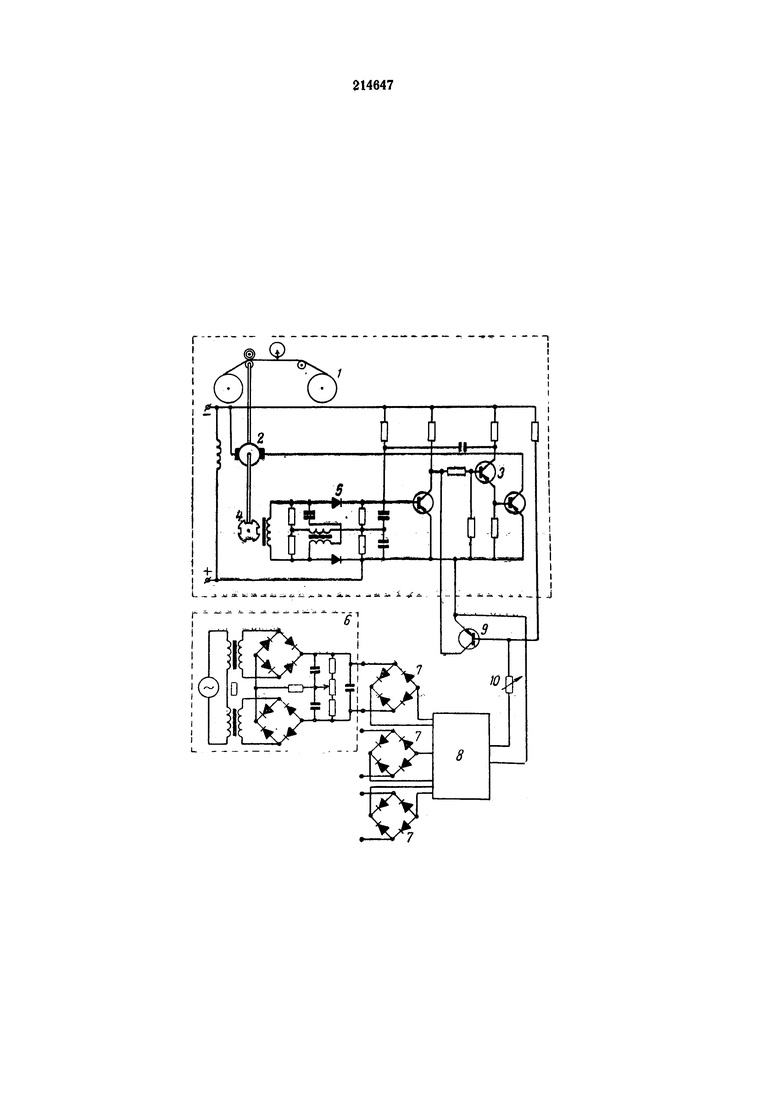
На чертеже изображена принципиальная электрическая схема предлагаемого устройства (используется двигатель постоянного тока).
Система автоматической стабилизации скорости ленты в лентопротяжном механизме 1, приводимой в движение электродвигателем 2, содержит усилитель 3 в цепи питания двигателя. На вход усилителя подается сигнал от тахогенератора 4, кинематически соединенного с валом двигателя, через дискриминатор 5 и сигнал от вибродатчика 6 через выпрямители 7, сумматор 8 и дополнительный усилитель 9.
Число и расположение вибродатчиков определяется направлением перегрузок. При перегрузках, действующих преимущественно в одном направлении, устанавливается один вибродатчик. В общем случае, при действии перегрузок в произвольном направлении, достаточно установить три вибродатчика по взаимно перпендикулярным осям, а их выходные сигналы просуммировать в сумматоре.
Необходимость выпрямления выходного сигнала вибродатчиков вызвана тем, что дополнительный момент трения в замкнутых опорах всегда возрастает, независимо от знака перегрузки. Сигналы с выходов выпрямителей 7 в общем случае суммируются, усиливаются по мощности в усилителе 9 и подаются на вход усилителя 3. Величина подаваемого сигнала устанавливается потенциометром 10 при отладке лентопротяжного механизма, чтобы прирост электромагнитного момента ведущего двигателя был равен дополнительному моменту трения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления скоростью перемещения магнитной ленты | 1982 |
|
SU1062779A2 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
| Лентопротяжный механизм | 1979 |
|
SU868830A1 |
| Устройство для перемещения магнитной ленты | 1989 |
|
SU1691885A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| Устройство для регулирования частоты вращения тяговых двигателей прицепа | 1979 |
|
SU935332A2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| УСТРОЙСТВО ЗАЩИТЫ КОЛЛЕКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ ОТ ПЕРЕГРЕВА | 2001 |
|
RU2214665C2 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
Устройство для автоматической стабилизации скорости ленты, приводимой в движение электродвигателем, преимущественно для лентопротяжных механизмов, содержащее усилитель в цепи питания двигателя, управляемый в зависимости от отклонения скорости от заданного значения при помощи тахогенератора, соединенного с валом двигателя, отличающееся тем, что, с целью повышения надежности, в нем использованы электрические вибродатчики, и на вход усилителя подключен дополнительный усилитель, управляемый через выпрямитель, сумматор и установочное сопротивление выходными сигналами указанных датчиков.
