Известны бесконтактные двигатели постоянного тока с безобмоточным зубчатым ротором и зубчатым неявнополюсным статором, несущим обмотку возбуждения и якорную обмотку, коммутируемую посредством полупроводникового коммутатора, управляемого датчиком положения ротора, катушки обмоток которого уложены на статоре в одних пазах с якорными обмотками. Однако в этих двигателях электромагнитная связь между якорными обмотками и обмотками датчиков отсутствует только в том случае, если воздушный зазор в машине строго равномерен.
В предлагаемой машине для исключения электромагнитной связи между указанными обмотками при наличии технологических погрешностей в изготовлении и сборке машины и для повышения тем самым надежности машины, катушки обмоток датчика в активной части изогнуты в виде трех петель, внутренние лобовые части которых уложены в кольцевые канавки в расточке статора. Канавки могут быть расположены на расстоянии, равном  активной длины статора от его торцовой поверхности.
активной длины статора от его торцовой поверхности.
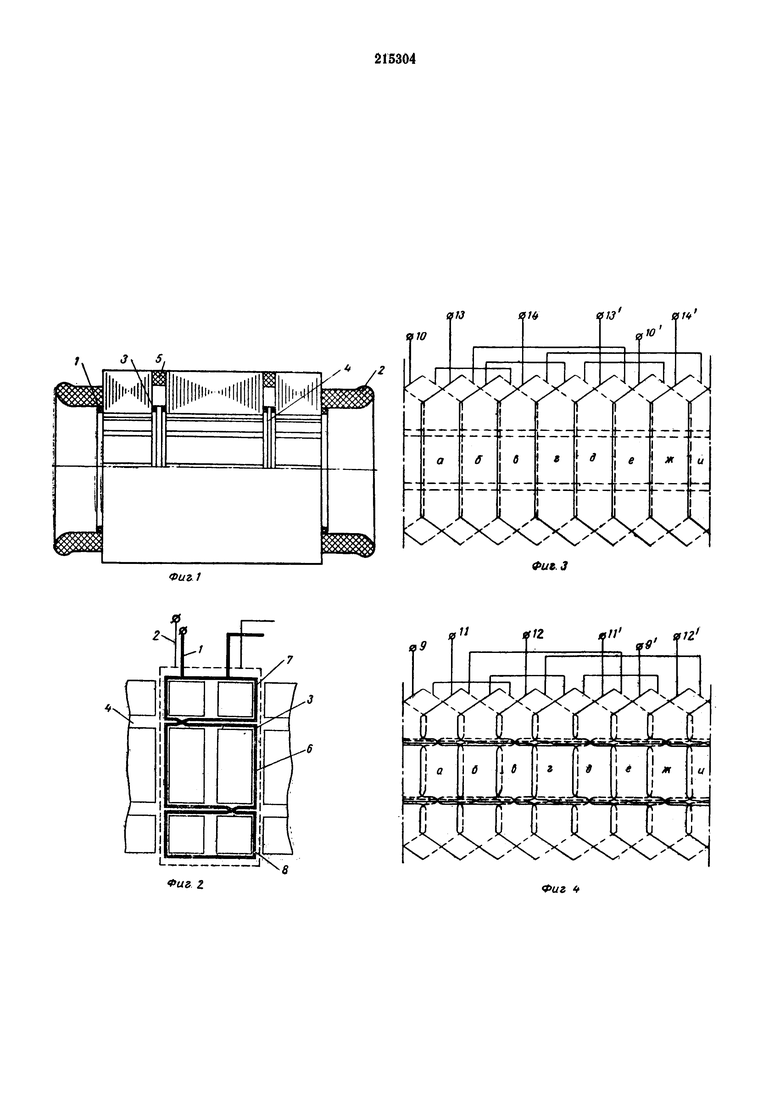
На фиг. 1 схематично изображена конструкция предлагаемого двигателя; на фиг. 2 - часть статора с одной катушкой датчика; на фиг. 3 дана схема обмоток возбуждения и якорной; на фиг. 4 - схема обмоток датчика.
Катушки 1 обмоток датчика уложены в одни пазы с катушками 2 якорной обмотки. Внутренние лобовые части 3 катушек обмоток датчиков расположены в кольцевых канавках 4 по расточке статора. Конструктивно канавки 4 могут быть образованы при сборке пакета статора установкой кольцевых прокладок 5 из немагнитного материала, внутренний диаметр которых равен диаметру по дну пазов статора. Активная длина внутренней петли 6 принимается равной сумме активной длины внешних петель 7 и 8.
Так как катушки датчиков занимают лишь 5-10% площади паза, укладка катушек обмоток датчиков в одни пазы с катушками якорной обмотки не ведет к заметному ухудшению использования якорной обмотки.
Датчик имеет первичную обмотку 9-91 (см. фиг. 4), уложенную в одни пазы с обмоткой возбуждения 10-101, и вторичные обмотки 11-111 и 12-121, катушки которых уложены в одни пазы с якорными обмотками 13-131 и 14-141. Первичная обмотка подсоединена к источнику переменного напряжения повышенной частоты. Фаза электродвижущей силы, индуктированной во вторичной обмотке датчика, зависит от положения ротора. Напряжение, снимаемое со вторичных обмоток, используется для формирования сигналов управления полупроводниковым коммутатором.
Если двигатель выполнен многофазным, то первичная обмотка укладывается в те же пазы, что и обмотка возбуждения, а вторичные в те же пазы, что и фазные якорные обмотки, соединение же вторичных обмоток должно повторять соединение катушек фазных обмоток.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1981 |
|
SU1053231A1 |
| Вентильный индукторный двигатель | 1985 |
|
SU1257774A1 |
| Вентильный индукторный двигатель | 1987 |
|
SU1501222A1 |
| Вентильный индукторный электродвигатель | 1987 |
|
SU1464264A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2079952C1 |
| ИНДУКТОРНЫЙ СВАРОЧНЫЙ ГЕНЕРАТОР | 2009 |
|
RU2430817C2 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| Трансформаторный датчик положения ротора | 1974 |
|
SU550733A1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2401499C1 |
| РОТОР РЕАКТИВНОЙ СИНХРОННОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2005 |
|
RU2283524C1 |
1. Бесконтактный двигатель постоянного тока с безобмоточным зубчатым ротором и зубчатым неявнополюсным статором, несущим обмотку возбуждения и якорную обмотку, коммутируемую посредством полупроводникового коммутатора, управляемого датчиком положения ротора, катушка обмоток которого уложена на статоре в одних пазах с якорными обмотками, отличающийся тем, что, с целью повышения надежности, каждая катушка обмоток датчика в активной части изогнута в виде трех петель, внутренние лобовые части которых уложены в кольцевые канавки, выполненные в расточке статора.
2. Двигатель по п. 1, отличающийся тем, что кольцевые канавки расположены на расстоянии, равном 1/4 активной длины статора от его торцовых поверхностей.
