Известны механизмы прерывистой подачи, содержащие храповое колесо, связанное с ходовым винтом и приводимое в движение собачкой, которая соединена с кулачковым приводом посредством рычага с укрепленным на нем регулируемым пальцем, сообщающим собачке знакопеременные перемещения. Величина подачи в этих механизмах изменяется путем захвата собачкой одного или нескольких зубцов храпового колеса, ступенчато. Необходимость захвата различного числа зубцов усложняет конструкцию привода собачки.
Отличительной особенностью описываемого механизма является то, что он снабжен соединяющей храповое колесо с ходовым винтом фрикционной муфтой, один из элементов которой жестко связан с ходовым винтом, и тормозом, взаимодействующим с упомянутым элементом и получающим движение от кулачка, установленного на валу привода. Кулачок обеспечивает включение тормоза в момент подачи ведомого вала на заданную величину. При такой конструкции механизма подача регулируется бесступенчато.
Тормоз выполнен в виде рычага, на котором укреплены колодка, взаимодействующая с закрепленным на ходовом винте элементом фрикционной муфты, и регулируемый палец, получающий движение от кулачка.
Для повышения точности величины подачи на рычаге привода собачки может быть установлен другой регулируемый палец, последовательно с первым вступающий в контакт с рабочим профилем кулачка, который в отдельных случаях может быть выполнен ступенчатым.
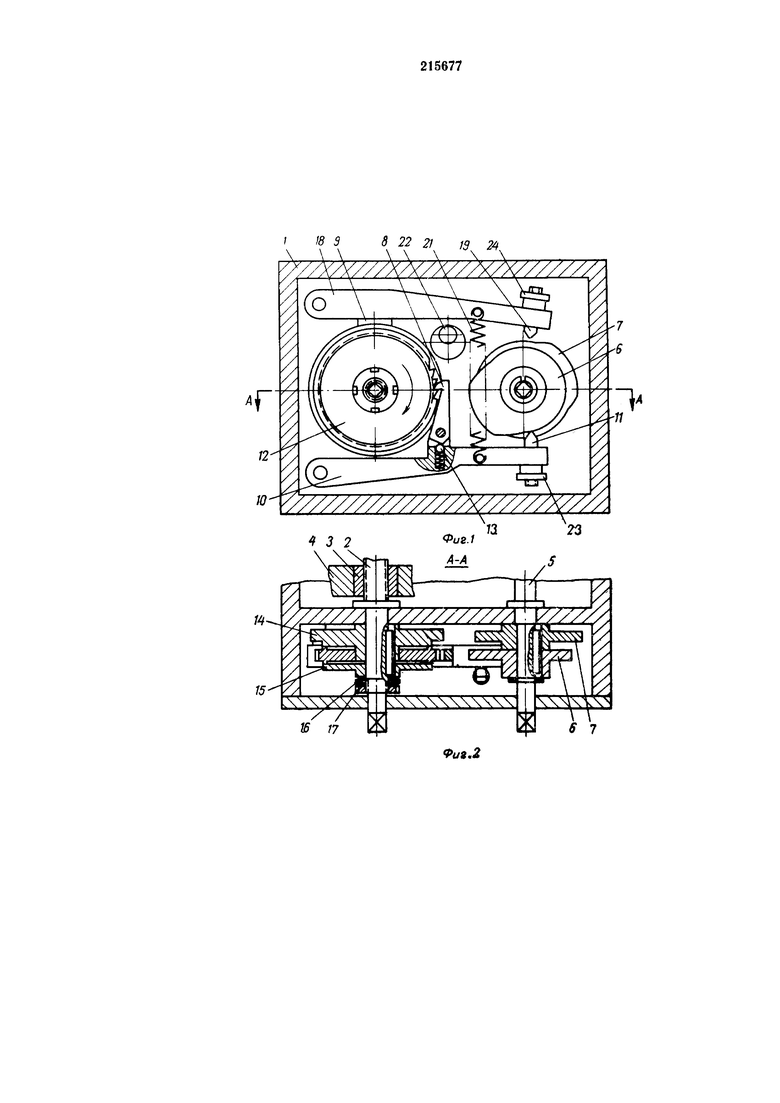
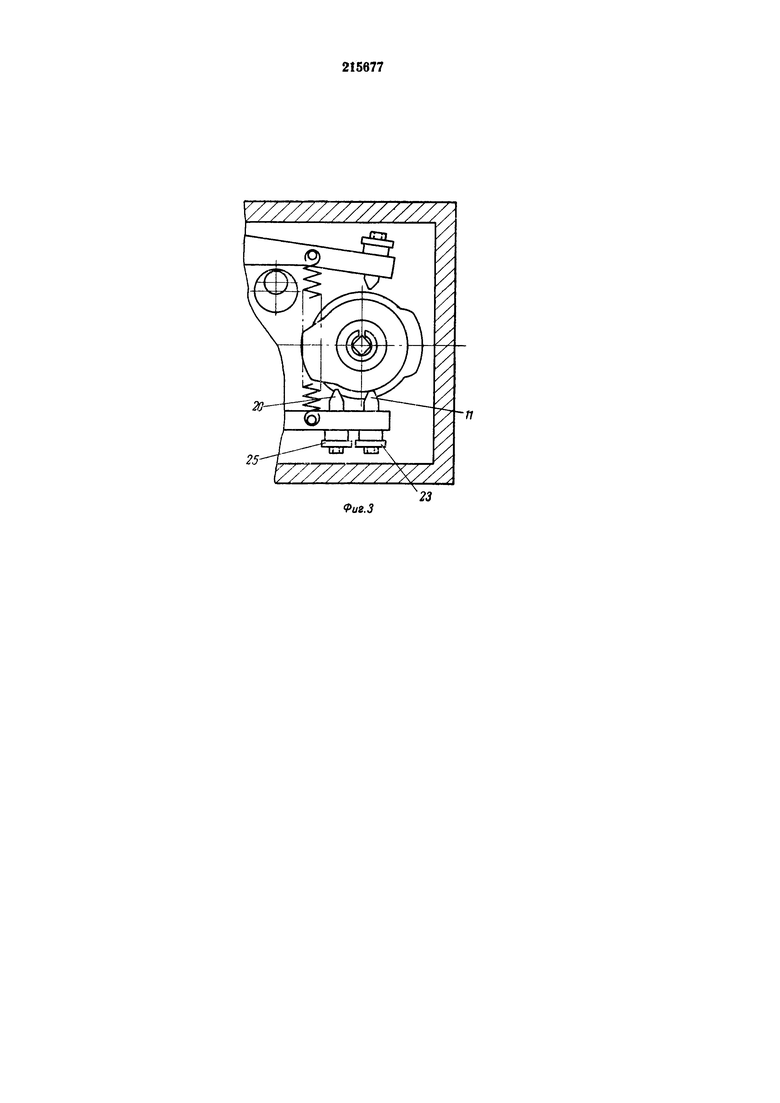
На фиг. 1 изображен описываемый механизм, продольный разрез; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - часть механизма с приводом собачки.
В корпусе 1 установлен ходовой винт 2, соединенный гайкой 3 с перемещаемым узлом 4, и вал 5, на котором установлено два кулачка 6 и 7 для привода в движение собачки 8 и тормозной колодки 9 соответственно.
Собачка получает движение от кулачка 6 через рычаг 10 с укрепленным на нем регулируемым пальцем 11 и передает вращение храповому колесу 12, свободно установленному на ходовом винте 2. К храповому колесу ее прижимает подпружиненный шарик 13.
Фрикционная связь храпового колеса с ходовым винтом осуществляется посредством фрикционной муфты, представляющей собой два диска 14 и 15, между которыми расположено храповое колесо 12. Один из дисков, например 14, укреплен на ходовом винте, а другой (15) установлен на шпонке и может перемещаться вдоль винта. Для создания момента трения между упомянутыми дисками и храповым колесом диск 14 прижимает храповое колесо 12 к диску 15 с помощью пружины 16 и гайки 17.
От кулачка 7 приводится в движение колодка 9 с помощью рычага 18 с регулируемым пальцем 19.
Для повышения точности величины подачи на рычаге 10 может быть установлен второй регулируемый палец 20 (см. фиг. 3). Рычаги 10 и 18 стянуты пружиной 21. Эксцентрик 22 служит для отключения тормоза.
Вылет пальцев 11, 19 и 20 регулируется с помощью гаек 23, 24 и 25.
При вращении вала 5 против часовой стрелки кулачок 6, воздействуя на палец 11, поворачивает рычаг 10, а кулачок 7, воздействуя на палец 19, поворачивает рычаг 18. При этом собачка поворачивает храповое колесо 12 на один или несколько зубцов и возвращается в исходное положение, а колодка 9 поднимается и снова опускается, включая и выключая тормоз в заданные моменты.
Поскольку момент трения фрикционной муфты больше момента сопротивления вращению винта 2, и меньше момента трения тормоза, то при выключенном тормозе храповое колесо 12 поворачивает винт 2, а при включенном тормозе храповое колесо проскальзывает относительно неподвижного винта.
Регулируя вылет пальцев 11 и 19 гайками 23 и 24 при соответствующих профилях кулачков 6 и 7, можно изменять угол поворота винта 2 (величины подачи) в пределах от нулевого значения при постоянно включенном тормозе (храповое колесо проскальзывает) до максимального при выключенном тормозе (храповое колесо поворачивается вместе с винтом).
В случае, когда пальцы 11 и 20 последовательно вступают в контакт с рабочим профилем кулачка 6, осуществляется прерывистый поворот рычага 10. Сначала палец 11 поворачивает рычаг до момента вступления его в контакт с наружным диаметром кулачка. После этого рычаг некоторое время остается неподвижным, а затем палец 20 поворачивает его до угла, соответствующего перемещению собачки на один или несколько зубцов храпового колеса.
Описываемый механизм может быть выполнен так, что кулачковый вал 5 будет вращаться в другом направлении или качаться в пределах 360°.
Для ускоренного перемещения ведомого узла 4 путем вращения винта 2 необходимо поворотом эксцентрика 22 отключить тормоз. Для обратного перемещения необходимо, кроме того, отключить собачку 8, перебросив ее через шарик 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЫЧАГ РЕГУЛИРОВОЧНЫЙ | 2002 |
|
RU2216663C1 |
| Транспортное средство | 1977 |
|
SU671173A1 |
| Станок для насекания рашпилей прямой и полукруглой формы | 1972 |
|
SU443731A1 |
| Механизм шаговой подачи заготовки | 1972 |
|
SU589135A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛИРОВОЧНЫЙ РЫЧАГ | 2004 |
|
RU2282072C2 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
| ТИГЕЛЬНАЯ ПЕЧАТНАЯ МАШИНА | 1986 |
|
RU2041829C1 |
| Устройство для изменения размера ячеи сети к сетевязальной машине | 1980 |
|
SU1000497A1 |
| Механизм подач | 1985 |
|
SU1292996A1 |
| Устройство для получения замкнутых прямоугольных контуров | 1980 |
|
SU870009A1 |
1. Механизм прерывистой подачи, содержащий храповое колесо, связанное с ходовым винтом и приводимое в движение собачкой, соединенной с кулачковым приводом посредством рычага с укрепленным на нем регулируемым пальцем, сообщающим собачке знакопеременные перемещения, отличающийся тем, что, с целью бесступенчатого регулирования величины подачи, он снабжен соединяющей храповое колесо с ходовым винтом фрикционной муфтой, один из элементов которой жестко связан с ходовым винтом, и тормозом, взаимодействующим с упомянутым элементом и получающим движение от кулачка, установленного на валу привода и обеспечивающего включение тормоза в момент подачи ведомого вала на заданную величину.
2. Механизм по п. 1, отличающийся тем, что тормоз выполнен в виде рычага, на котором укреплены колодка, взаимодействующая с закрепленным на ходовом винте элементом фрикционной муфты, и регулируемый палец, получающий движение от кулачка.
3. Механизм по п. 1, отличающийся тем, что, с целью повышения точности величины подачи, на рычаге привода собачки установлен второй регулируемый палец, последовательно с первым вступающий в контакт с рабочим профилем кулачка.
