(54)ТРАНСПОРТНОЕ СРЕДСТВО
36
человека, что в значительной мере снижает КПД такого цривода. Жесткая связь ножных рычагов привода его единым выходным , а также жесткая связь последнено с ходовыми колесами исключает возможность движения тележки, с накатом, что приводит к неудобству педалирования и не позволяет развить достаточно высокую скорость,
Известно также.транспортное средствр, содержащее установленную на ходовых колесах раму, на которой смонтировано сидение для управляющего транспортным средством .человека и ножной привод, на выходном валу которого свободно посажены качающиеся ножные рычаги, кинематически связанные между собой посредством возвратного механизма и снабженные храповиками, взаимодействующими с двумя храповыми колесами, смонтированными на выходном валу привода, квторый связан С ведущим ходовым колесом цепной передачей f2.
Известные транспортные средства не обеспечивают возможности реверсирования хода, что затрудняет возможность их применения в трубопроводе.
Целью настоящего изобретения является обеспечение реверсивного хода и удобства управления транспортным средством.
Эта цель достигается тем, что храповые колеса свободно посажены на вал и зубья одного храпового колеса направлены в сторону, противоположную направлению зубьев другого храпового колеса,а храповики каждого ножного рыча. га имеют сцепление с обоими храповыми колесами, между которыми на выходном .валу установлена кулачковая муфта для передачи вращения с храповых колес па вал и его реверса, посаженная на вал с возможностью ее осевого перемещения и управляемая реверсивной тягой, причем на выходном валу привода смонтиро ван фрикционный тормоз, управляемый тормознойТЯГОЙ, которая вместе с реверсивной тягой через распределительное устройство кинематически связана с управляющей тягой, соединенной с единой ручкой управления смонтированного на раме механизма управления. При этом фрикционный тормоз содержит закрепленный на выходном валу припода тормозной диск и подпружиненный тормозной диск, смонтированный на корпусе привода с возможностью-его осезого перемещения, а распределительное
34
устройство содержит корпус, в котором размещен ползун, шарнирно связанный с управляющей тягой и кзаимодеисткующиГ через кулачковый механизм с тормозной качалкой, шарнирно связанной с тормозной тягой, и с реверсивной качалкой шарнирно связанной с реверсивной тягой.
Кроме того, механизм управлениг содержит корпус, в котором смонтирован шарнирно связанный с управляющей тягой поворотный рычаг с ручкой управления, в которой расположена подпружиненная фиксирующая кнопка, снабженная стопором, фиксируемым в пазах трехпозиционного секторного фиксатора, закрепленного на корпусе механизма управления, на котором также смонтировано приспообление для принудительной фиксации кнопки ручки управления в промежуточной позиции, соответствующей нейтральному положению кулачковой муфты и рабочему положению тормоза привода и содержащее Смонтированный в корпусе механизма управления Чшдпружиненный ползун, на котором шарнирно закреплена подпружиненная собачка, служащая упором для стопора фиксирующей кнопки ручки управления.
Причем возвратный механизм содержит конические секторы, каждый из которых установлен на качающемся ножном рычаге, и коническую шестерню, связывающую между собой оба конических сектора, а цепная передача снабжена автоматическим натяжным устройством, содержащим два подпружиненных в направлении натяжения поворотных кронштейна i с установленными па них натяжными роликами, взаимодействующими с ветвями цепной передачи, .причем на раме смонтированы контактирующие с натяжными роликами два ynqpa j один из которых выполнен регулируемьгм.
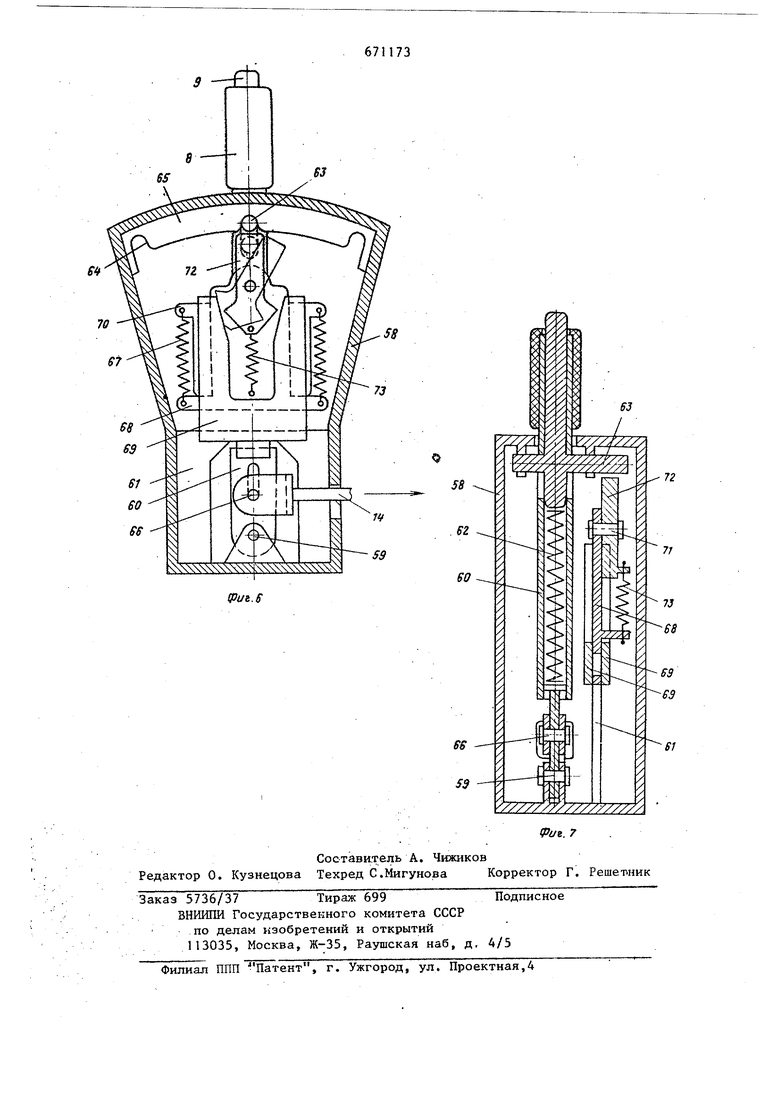
На фиг, 1 изображена тележка, o5щIiй вид; па фиг. 2 - кинем.атическая схема привода тележки; на фиг.З разрез А-А на фиг. 2; на фкг, кинематическая схема распределительного устройства и фрикционного тормоза привода; на фиг. 5 - разрез Б-Б на фиг 4; на фиг. 6 - механизм управления; на фиг. 7 - разрез механизма управления по оси симметрии.
Транспортное средство представляет собой тележкудля обслуживания рельсопого трубопровода I с рельсом 2, используемого в трубопроводной кон- 56 тейнерной системе транспортировки гру зов (фиг.1). На ходовых колесах - ве дущем 3 и ведомом 4 установлена рама 5, на которой смонтированы кресло 6, механизм 7 управления с ручкой 8 управления и фиксирующей кнопкой 9, и ножной привод 10 с рычагами 1Г и с шарнирно закрепленными на них педалями 12. Для боковой стабилизации тележки в трубопроводе слзлкат смонтированные на раме 5 боковые поддерживающие ролики I3. Механизм 7 управления связан с приводом 10 управляющей тягой 14. Ведущая звездочка 15 привода 10 закреплена на его выходном валу 16 и связана с закрепленной па валу колеса 3 ведомой звездочкой 17 посредством цепной передачи 18, снабженной автоматическим натяжным устройством 19, смонтированным на раме 5. Автоматическое натяжное устройство содержит смонтирован1гые на оси 20 два шарнирно поворотные кронштейна 21 и 22, подпружиненные в направлении натяжения ветвей цегп 18 двумя пружинами кручения - по одной на каждый кронштейн, смонтированных на оси 20 (на чертеже не показаны}. На кронштейнах 2 -и 22 установлены вращающиеся натяж ные ролики 23. Автоматическое натяжное устройство 19 снабже О упором 24у служащим для ограничения поворота кронштейнов 21 и 22, кронштейна 21 посредством взаимодействия его щеки с цилиндрической поверхностью упора 2 а кронштейна 22 посредством взаимодействия шарового наконечника тяги 25 с подпятником кронштейна 22 с одной стороны и регулировочной гайкой 26 с плоским срезом упора 24 с другой стороны. Ножной привод 10 имеет возвратный мезанизм, выполь енный в виде конического редуктора. Он содержит закрепленные на рычагах 11 конические зубчатые секторы 27, связанные между собой конической шестерней 28, смонтированной в корпусе привода (фиг.2 и З}. Привод имеет обгонно-реверсивный редуктор, выполненный в.виде сдвоенного храпового механизма, содержит ус тановленные с возможностью вращения на выходном валу 16 нривода два проти воположно направленные храповые колеса 29 и 30, зацепляющуюся с этими храповыми колесами кулачковую муфту 31, посаженную на вал 16 на шпонке 32 с возможностью ее осевого перемеще3на этом валу, четыре храповика ния 33, 34, 35 и 36, шарнирно установленные на рычагах 11 посредством осей 37 и подпружиненные пружинами 38. Храповики 33 и 34 смонтированы на левом рычаге 1 1., а храповики 35 и 36 - на правом, причем храповики 33 и 35 взаимодействуют с храповым колесом 29, а храповики 34 и 36 - с храповым колесом 30. Направление перемещения муфты 31 показано на фиг. 2 стрелкой. Управление перемещением муфты 31 осуществляется посредством смонтированного на корпусе привода 10 распределительного устройства, связанного с муфтой 31 реверсивной тягой 39 и служащего также для управления фрикционным тормозом привода фиг. (4 и 5). Фрикционньш тормоз содержит закрепленный на выходном валу привода тормозной диск 40 и подпружиненный тормозной пружиной 41 прижимной диск 42, закрепленный на конце тормозной тяги 43,установленной с возможностью ее осевого перемещения в направляющей корпуса привода. Вращению тяги 43 в этой направляющей препятствует стопор 44.Распределительное устройство содержит перемещаемый в его корпусе ползун 45,шарнирно закрепленные на корпусе распределительного устройства посредством соответственно осей 46 и 47 тормозную и реверсивную качалки 48 и 49, а также кулачковый механизм 50, образованный рабочими скосами 51 ползуна 45 и перемещаемым в нанравляющих корпуса распределительного устройства цшн-1ндрическим стержнем фиксатора 52. Направление перемещения ползуна 45 показано стрелкой на фиг.4, направление перемещения фиксатора 52, перпендикулярное перемещению олзуна. Показано стрелкой на фиг.5, олзун 45 одним ко}1цом шарнирно вязан с управляющей тягой 14 посредтвом оси 53, а другим концом шарнир-о связан посредством оси 54 с реверивной качалкой 49, шарнирно связаной с реверсивной тягой 39 посредстом оси 55. Тормозная качалка 48 одим концом шарнирно связана с фиксаором 52 посредством оси 56, а друим концом шарнирно связана с тормозой тягой 43 посредством оси 57. Ползун 45 через управляющую тягу 5 связан с ручкой 8 управления мехаизма 7 управления {фиг. 6 и 7) . еханизм управления содержит шарнир-
76
но закрепленный на его корпусе 58 посредством оси 59 поворотный рычаг 6 с ручкой 8 управления и блокиратор 61, эакрепле:нный на корпусе механизма управления. В трубчатом корпусе рычага 6, перемещается подпружиненная пружиной 62 фиксирующая кнопка 9, снабженная стопором 63, посредством которого ручка 8 управления фиксируется Е стопорных пазах 6А трехпозиционного секторного фиксатора 65, закрепленного на корпусе 58 механизма управления. Рычаг 60 :шарнирно связан с управляющей тягой 14 посредством оси 66.Блокиратор 61 содержит подпружиненный пружинами 67 ползун 68,. перемещаемый в щеках 69 и в установленных между этих щек направляющих 70, а также шарнирно закрепленную на ползуне посредством оси 71 поворотную собачку 72, подпружиненную возвратной пружиной 73,
Тележка работает следующим образом. , Человек, находящийся в кресле 4 (фиг. t), попеременно педалирует ногами, сообщая педалям 12 и рычагам 11.попеременное качательное движение. В приводе 10 попеременное качательное движение рычагов преобразуется в реверсивное вращение выходного вала 16 и ведущей звездочки 15, которое посредством цепной передачи 18 передается на ведомую звездочку 17, на вал ведущего колеса 3 и далее на само это колесо, в результате чего тележка имеет возможность перемещаться как вперед, так и назад, При этом боковая устойчивость тележки обеспечивается роликами 13, упирающимися во внутреннюю поверхность трубопровода. Управление направлением движения тележки осуществляется ручко 8 управления механизма 7 управления, имеющей три фиксированных положения: Стоп, Ход вперед и Ход назад (1на фиг.1 ручка 8 управления показана в нейтральной позиции, соответствующей положению Стоп). Переключение ручки 8 управления производится с выжатой фиксирующей кнопкой 9. Перемещения ручки 8 управления, преобразуемые в механизме 7 управления в соответствующие перемещения управляющей тяги 15, передаются через последнюю приводу 10, в котором-эти перемещения получают соответствующие преобразования, приводящие либо к реверсу вращения выходного вала 16
38
в результате чего тележка меняет направление своего движения, либо к торможению тележки. При перемещении . ручки В управления из нейтральной позиции вперед в положение Ход вперед или назад в положение Ход назад тележка получает возможность двигаться соответственно вперед или назад., При перемещении же ручки управления из положения Ход вперед и Ход назад в нейтральную позицию, соответствующую положению Стоп, производится торможение тележки, приводящее к ее остановке. Натяжение цепи цепной передачи 18 осуществляется автоматическим натяжным устройством 19, обеспечивающим автоматическую переподтяжку ветвей цепи при реверсе хода тележки. При монтаже цепной передачи кронштейн 21 принудительно поджимают к упору 24, после чего производят предварительно натяжение ветвей цепи путем укорачивания тяги 25 за счет завинчивания регулировочной гайки 26 до предварительногб регулировочного провисания ветвей цепи. После освобождения кроншттейна 21 оба кронштейна под действием смонтированных на оси 20 пружин кручения (на чертеже не показаны) поворачиваются в направлении натяжения цепи, в результате чего происходит переподтяжка ветвей цепи с некоторым уменьшением их провисания до номинальной величины. В результате переподтяжки ветвей цепи между кронштейнами и упорами образуются примерно равные зазоры, соответствующие кинематическому положению натяжного устройства 19. при неподвижной тележке или при ее свободном ходе (для
кронштейна 21 это зазор между его щекой и цилиндрической поверхностью упора 24, а для. кронштейна 22 - зазор в тяге 25 между гайкой 26 и плоским срезом упора 24J.
Автоматическое натяжное устройство работает следующим образом. При движении тележки вперед верхняя ветвь цепной передачи оказывается натянутой пережаточным усилием,в результате чего за счет составляющей этой тяги оказывается поджатой к упору 24. Увеличивающееся при этом провисание нижней ветви цепи выбирается поворотом под действием пружины кручения кронштейна. 21, при этом зазор между последним и упором 24 уве9-
личивается. При движении же тележки назад натянутой передаточным усилием оказывается нижняя ветвь цепи, в результате чего кронштейн 21 поджимается к упору 24, а увеличивающееся при этом провисание верхней ветви цепи выбирается поворотом под действием пружины кручения кронштейна 22, при этом увеличивается зазор между ним и упором 24, Таким образом при реверсе хода тележки происходит автоматическая переподтяжка цепи с обеспечением надежного нат.яжения обеих ее ветвей.
Преобразование качательного движения рычагов 11 (фиг.2 и З) в реверсивное вращение выходного вала 16, обеспечиваемое посредством обгоннореверсивного редуктора привода 10, осуществляется следующим образом. При вращении от усилия ноги правогО рычага 11 за счет связи его с правьм посредством конических зубчатых секторов колес 27 и конической шестерни 28 принудительно вращается против часовой стрелки, выталкивая левую ноГУ человека назад и наоборот При вращении по часовой стрелке правого рычага 11 храповик 35 поворачивает храповое колесо 29 по часовой стрелке, а храповик 36 проскальзывает по храповому колесу 3 (так как храповое колесо 30 и храповики 34 и 36 противоположно направлены храповому колесу 29 и храповикам 33 и 35). В это же время при вращении против часовой стрелки левого рычага 11 храповик 33 проскальзывает по храповому колесу 29, а храповик 34 поворачивает храповое колесо 30 против часовой стрелки. Таким образом, в данный момент храповое колесо 29 вращается по часовой стрелке , а храповое колесо 30 против. При вращении же правого рычага против часовой стрелки храпрвик 35 проскальзывает по храповому коле су 29, а храповик 36 пдворачивает храповое колесо 30 против часовой стрелки. В это же время при вращении по часовой стрелке левого рычага храповик 3-3 поворачивает храповое колесо 29 по часовой стрелке, а храповик 34 проскальзывает по храповому колесу 30. Таким образом, в один и тот же момент храповое колесо 29 поворачивается по часовой стрелке ,а хра повое колесо 30 - против, т.е. храповые колеса 29 и 30 вращаются так же, как в предыдущий рассматри7 10
аемый момент времени по противоположном качательном движении рычагов. Следовательно, при педалировании рычагами 11 храповое колесо 29 постоянно вращается по часовой стрелке, а храповое колесо 30 - против. Перехват вращательных днижениа храповых колес обеспечивается инерцив вращающихся частей тележки. Снятие вращательного движения с храповых колес на вал 16 обеспечивается кулачковой муфтой 31, соединенной с валом шпонкой 32 и имеющей возможность зацепляться своими кулачками с ответными кулачками храповых колес На фиг. 2 кулачковая муфта 31 показана в нейтральном положении. При перемещении ее влево она зацепляется с храповым колесом 29,и вал 16 вращается по часовой стрелке, что соответствует движению тележки вперед, а при перемещении кулачковой муфты вправо она зацепляется с храповым колесом 30, и вал 16 вращается против часовой стрелки, что соответствует движению тележки назад.
Реверсивные перемещения кулачковая муфта 31 получает от распределительного устройства привода, служа го также для управления его фрикционным тормозом (фиг. 4 и 5). В распределительном устройстве привода происходит преобразование перемещени ползуна 45, связанного с ручкой 8 управления посредством управляющей тяги 14, в управляющие перемещения реверсивной и тормозной тяг 39 и 43. При перемещении ползуна 45 вверх (фиг,4)реверсивная качалка 49 поворачвается по часовой стрелке,вследствие чего реверсивная тяга 39 перемещается влево, перемещая влево кулачковую муфту 31 (фиг. 2)и зацепляя последнюю с храповым колесом 29, в результате чего выходной вал 16 получает возможность вращаться по часовой стрелке, а тележка - двигаться вперед. В это же время при перемещении ползуна 45 вверх последний своим рабочим скосом 51 выжимает влево фиксатор 52, вследствие чего тормозная качалка 48 поворачивается по часовой стрелке,и тормозная тяга 43, преодолевая усилие пружины 41, перемещается вправо, отжимая прижимной диск 42, в результате чего вал 16 оказывается расторможенным. При перемещении ползуна 45 вниз качалка 59
|Поворачивается против часовой стрелки,.вследствие чего тяга 39 и кулачковая муфта 31 перемещаются вправо, что приводит к .ацегшекиюмуфты 31 с храповьш колесом 30, к возможности
вращения вала 16 против часовой стрел и к движению тележки назад. Что же касается кулачкового механизм; 50 и фрикционного тормоза, то там происходят те же преобразования, что и при перемещении ползуна 45 вверх, с той лишь разницей, что фиксатор 52 вьркимается влево другим скосом 51 ползуна 45. Таким образом, при перемещении ползуна 45 вверх или вниз (фиг.4) кулачковая муфта 31 зацепляется соответ:ствекно либо с храповым колесом 29 либо с храповым колесом 30, а прижимной диск 42 фрикционного тормоза в обоих случаях отжимается от тормозног диска 40, вследствие чего тележка имеет возмежность перемещаться либо вперед, либо назад. В нейтральном же положении ползуна 45 (фиг.4) кулачковая муфта 31 находится Б нейтрал ном положении (фиг, 2), а прижимной диск 42 поджат к тормозному диску 40, вследствие чего рычаги 11 находятся на холостом ходу, а талежка находится на тормозе.
Нейтральное положение ползуна 45 соответствует нейтральному положению ручки 8 управления (фиг.6 и 7) При перемещении ручки 8 вправо ползун 45 посредством тяги 14 перемещается вправо (фиг. 4 вверх)а при перемещении -ручки влево ползун перемещается влево - (фиг. 4 вниз). Для перемещения ручки 8 управления в любую из ее. трех позиций необходимо большим пальцем руки выжать фиксирующую .кнопку 9, чтобы вывести стопор 63 из стопорного паза 64. При резком переключении ручки 8 на ходу тележки из одного крайнего положения в другое, т.е. при . резком реверсировании хода тележки, происходит поломка храпового механизма пр1-шода. Во избежание этого в механизме 7 управления установлен блoки ратор 61,который работает следующим образом. При набегании стопора 63 на поворотную собачку 72 последняя поворачивается на оси 7 -до упора ее в рабочий скос щеки 69 (на фиг. 6 это положение собачки показано тонкими лини ми). Возникающая при этом вертикальная составляющая усилия контакта сто- ора с собачкой, преодолевая усилие
большого пальца руки человека, выталкивает стопор 63 вместе с фиксирующей кнопкой 9 вверх, вследствие чего стопор 63 западает в паз 64, в резу.пьтате чего ручка 8 принудительно фиксируется в нейтральном гихпожеии -. что приводит к торможегшк) тележки. Пссле этого освободившаяся собачка 72 под ействием возвратной пружины 73 понтрачивается в исходное положение. Теперь ля того, чтобы перевести ручку 8 управлергия из нейтрального положения дальше по ходу движения в крайнее положение, необходимо еще раз выжать фиксирующую кнопку 9. При этом стопор 63, преодолевая усилие пружин 67, выжмет собачку 72 вместе с ползуном 68 вниз и выйдет из паза 64, после чего ручка 8 управления получает свободу перемещения в крайнее положение. При этом перемещении освободившийся ползун 68 под действием пружин 67 приходит в исходное положение до упора его в направляющие 70. Таким образом, при попытке резко реверсировать направление движения тележки без ее остановки срабатывает блокиратор 61, в результате чего происходит обязательное торможение тележки с принудительнсй фиксацией ручки 8 управления в нейтральном положении, что предотвращает поломку храпового механиэма привода.
Изобретение представляет собой компактное, простое и надежное по конструкции транспортное средство с высокими } одовыми качествами и удобным управлением. Его можно эффективно испсшьзовать для обслуживания магистральных трубопроводов большой протяженности.
Формула изобретения
1. Транспортное средство преимущественно для г/еремещения по трубопроводам транспортных контейнерных систем, содержащее установленную на ходовых колесах раму, на которой смонтировано сидение для управляющего транспортным средством человека и ножной привод, на выходном валу которого свободно посажены качающиеся ножные рычаги, кинематически связанные между собой посредством возвратного механизма и снабженные храповиками, взаимодействующими с двумя храповыми колесами, смонтированными на
.6
выходном валу привода, который связан с ведущим ходовым колесом цепной передачей, отличающееся тем, что, с целью обеспечения реверсивного хода и удобства управления, храпоаые колеса свободно посажены на вал, и зубья одного, храпсвого колеса направлены в сторону, противоположную направлению зубьеи другого храпового колеса, а храповики каждого ножного рычага имеют сцепление с обоими храповыми колесами, между которыми на выходном валу установлена кулачковая муфта для передачи вращения с храповых колес на вал и его реверса, посаженная на вал с возможностью ее осевого перемещения и управляемая реверсивной тягой, причем на выходном валу привода смонтирован фрикционный тормоз, управляемый тормозной тягой,которая вместе с реверсивной тягой через распределительное устройство кинематически связана с управляющей тягой, соединенной с единой ручкой управления смонтированного на раме механизма управлени .
2.Средство по п. 1, отличающ е ее я тем, что фрикционный тормоз содержит закрепленный на выходном валу привода тормозной диск и подпружиненный тормозной диск, смонтированный на корпусе привода с возможностью его осевого перемещения и управляемый тормозной тягой.
3.Средство по пункту I, о т л ичающееся тем, что распределительное устройство содержит корпус, в котором размещен ползун, шарнирно связанный с управляющей тягой и взаимодействующий через кулачковый механизм с тормозной качалкой, шарнирно связанной с тормозной тягой, и с реверсивной качалкой, шарпирно связанной с. реверсивной тягой. . .
4.Средство по п. 1, о т л и ч а ющ е е с я тем, что механизм управления содержит корпус, в котором смонтирован шарнирно связанный с управляющей тягой поворотный рычаг с ручкой
14
73
управления, в которой расположена подпружиненная фиксирующая кнопка, снабженная стопором, фиксируемым в пазах трехпозиционного секторного фиксатора закрепленного на корпусе механизма управления, на котором также смонтировано приспособление для принудительной фиксации кнопки ручки управления в промежуточной позиции, соответствующей нейтральному положению кулачковой муфты и рабочему положению тормоза привода.
5.Средство по пп,I и 4, о т л ичающееся тем, что приспособление для принудительной фиксации ручки управления в промежуточной позиции содержит смонтированный в корпусе механизм управления подпружиненный ползун, на котором шарнирно закреплен подпружиненная собачка, служащая упо ром для стопора фиксирующей кнопки ручки управления.
6.Средство по п. 1,. отличащееся тем, что возвратный механизм содержит конические секторы, каждый из которых установлен на качающемся ножном рычаге, и коническую шестерню связывающую меходу собой
оба конических сектора,
7.Средство по n.i, отличающееся тем, что цепнс-я передача снабжена автоматическим иатяжнь№г устройством, содержащим два подпружиненных в направлении натяжения поворотных кронштейна с установленными на них натяжн пчи роликами,взаимодействующими с ветвями цепной передачи,причем на раме смонтированы контактирующие
с натяжными роликами два упора, один из которых выполнен peгyлиpye ым
Источники информации, принятые во внимание при экспертизе
1.Чертеж 112.00.000 от 1971, разработанньш КБ треста Союзгазспецстрой Министерства строительства Предприятий .нефтяной и газовой промьппленности.
2.Патент Германии № 54968, кл. 63 к, 6, 12.01.81.
t 2


| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 1991 |
|
RU2017647C1 |
| Маневровая лебедка | 1950 |
|
SU98911A1 |
| Тренажер гребца "Турист | 1987 |
|
SU1498521A1 |
| АВТОМАТИЧЕСКИЙ КРУГЛО-ТКАЦКИЙ СТАНОК | 1946 |
|
SU71477A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1199376A1 |
| ЗАТЯЖНАЯ МАШИНА | 1929 |
|
SU27311A1 |
| ТРАНСПОРТ ПОВЫШЕННОЙ ПРОХОДИМОСТИ С НАВЕСНЫМ ОБОРУДОВАНИЕМ И НОЖНЫМ ПРИВОДОМ | 2013 |
|
RU2544049C2 |
| Устройство для тренировки пловцов | 1986 |
|
SU1395343A1 |
| ТЕЛЕЖКА ДЛЯ ПЕРЕВОЗКИ ЧЕЛОВЕКА | 1971 |
|
SU424765A1 |
| Дублирующий ручной привод педалей газа и тормоза для автомобиля | 2016 |
|
RU2621399C1 |


к кулачкоЯой нуфте К ручке управления
