Известны гидравлические грузоподъемные краны, содержащие колонну с поворотным оголовком и стрелой переменного вылета, несущей грузовую каретку, тросо-блочную систему изменения вылета стрелы и подъема крюковой обоймы, управляемую силовыми цилиндрами.
Предложенный кран отличается тем, что на грузовой каретке смонтированы управляемые механизмы зажима грузового каната относительно каретки и фиксации ее относительно стрелы.
Благодаря этому упрощается конструкция крана.
Механизм зажима выполнен в виде подвижной в направляющих каретки колодки, прижимающей канат к ложементу.
Механизм фиксации представляет собой винт, входящий в зацепление с гайкой, расположенной на каретке.
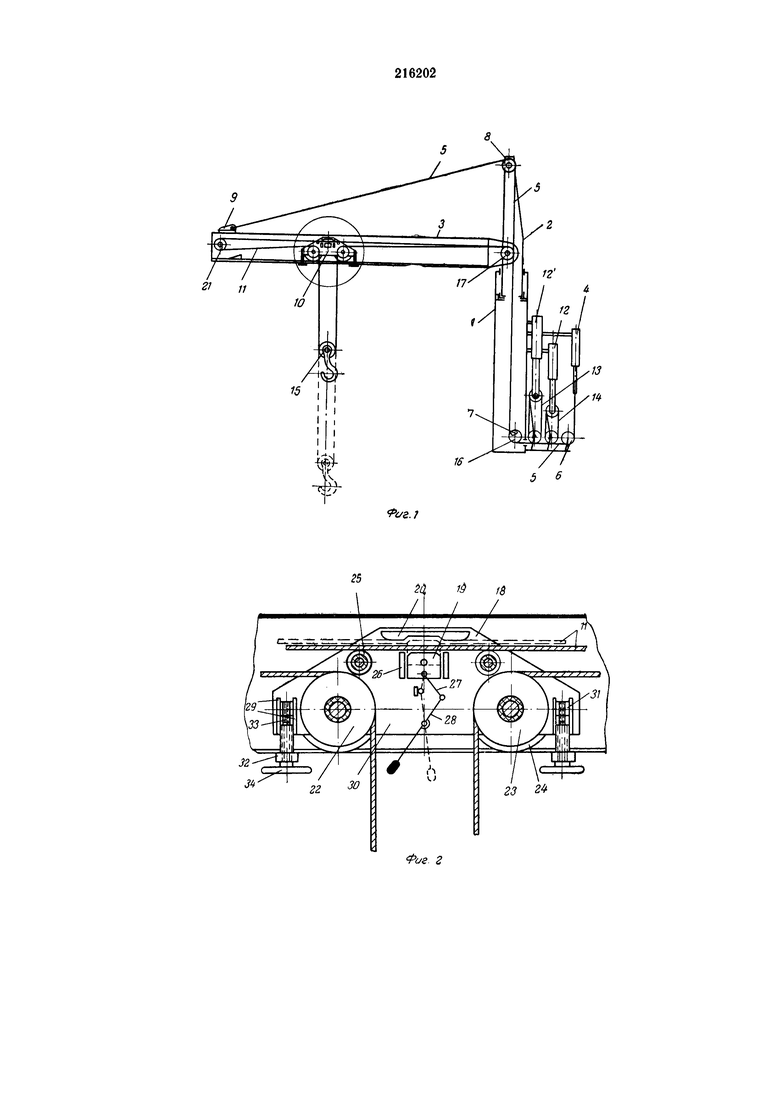
На фиг. 1 схематически изображен описываемый кран; на фиг. 2 - грузовая каретка.
Кран содержит колонну 1 с поворотным оголовком 2, на котором шарнирно закреплена стрела 3, управляемая гидроцилиндром 4, тросом 5, проходящим через блоки 6, 7 и 8, закрепленным на стреле посредством кронштейна 9.
Каретка 10 расположена внутри профиля стрелы 3 и позволяет с помощью одного каната 11, образующего у двух гидроцилиндров 12 и 12′, закрепленных на колонне, два блочных полиспаста 13 и 14, перемещать каретку 10 и грузовой блок 15. Канат 11 от полиспастного блока 13 проходит по одним из отклоняющих блоков 16 и 17, смонтированных на оси поворота стрелы 3, и далее идет внутри стрелы. Затем канат 11 проходит через корпус 18 каретки 10, где прикрепляется зажимом 19 к ложементу 20, огибает блок 21, проходит через блок 22, грузовой блок 15, блок 23 и через вторые блоки 16 и 17 выходит на полиспаст 14.
Когда канат 11 зажат зажимом 19, каретки 10 при противоположной работе гидроцилиндров 12 и 12′ передвигается каретка 10. Когда работает гидроцилиндр 12, груз опускается либо поднимается.
На корпусе 18 каретки на одной оси смонтировано по два колеса 24 и по блоку 22 и 23. При расфиксации каната 11 в корпусе 18 его поддерживают два ролика 25.
Зажим 19 находится между направляющими 26 и приводится в действие рычагами 27 и 28. В корпусе 18 с торцов между направляющими 29 и стенками 30 приварена гайка 31 По оси тормоза 32 через отверстие в нем проходит винт 33 с маховиком 34.
При вращении маховика 34 вращается винт 33 и, ввинчиваясь в гайку 31, прижимает тормоз 32 к стреле 3, колеса 24 фиксируются, каретка 10 неподвижна, а канат 11 полностью освобожден. При установке крана, например, на автомашине зажимают каретку и освобождают канат 11 вручную.
Если кран имеет электропривод барабанного типа, то управление освобождения каната и фиксации каретки производится дистанционно, а исполнительными органами являются электромагниты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНЫЙ КРАН С ИЗМЕНЕНИЕМ ВЫЛЕТА ПОСРЕДСТВОМ КАЧАНИЯ СТРЕЛЫ | 1967 |
|
SU203875A1 |
| УССР IIБЛЙЛИОТЕКД | 1966 |
|
SU185476A1 |
| БАШЕННЫЙ КРАН | 1967 |
|
SU206044A1 |
| Ограничитель угла отклонения грузового полиспаста стрелового крана | 1975 |
|
SU550333A1 |
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| Кабельный кран | 1987 |
|
SU1532530A1 |
| КРАН НА АВТОМОБИЛЬНОЙ МАСТЕРСКОЙ | 2014 |
|
RU2571481C2 |
| Стреловой кран | 1976 |
|
SU703486A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1972 |
|
SU434055A1 |
| КРАН-ТРУБОУКЛАДЧИК | 2015 |
|
RU2601319C1 |
1. Гидравлический грузоподъемный кран, содержащий колонну с поворотным оголовком и переменного вылета стрелой, несущей грузовую каретку, и тросо-блочную систему изменения вылета стрелы и подъема крюковой обоймы, управляемую с помощью силовых цилиндров, расположенных вдоль колонны, отличающийся тем, что, с целью упрощения конструкции крана путем использования грузового каната для перемещения каретки, на последней смонтированы управляемые механизмы зажима грузового каната относительно каретки и фиксации ее относительно стрелы.
2. Кран по п. 1, отличающийся тем, что механизм зажима выполнен в виде подвижной в направляющих каретки колодки, прижимающей канат к ложементу.
3. Кран по п. 1, отличающийся тем, что механизм фиксации выполнен в виде винта, расположенного на стреле и входящего в зацепление с гайкой, закрепленной на каретке.
