1
Изобретение относится к области грузоподъемных машин, а именно к стреловым подъемным кранам с изменением вылета качанием стрелы, оборудованных устройством для выравнивания горизонтального перемещения груза.
Известны грузоподъемные краны с изменением вылета посредством качания стрелы, оголовок которой соединен с портальной стойкой посредством уравнительного полиспаста, образованного ветвями грузового каната с подвижными и неподвижными блоками.
Целью изобретения является улучшение выравнивания горизонтальной траектории движения груза при качании стрелы.
Достигается это тем, что неподвижные блоки полиспаста размещены на концах кронштейнов, шарнирно установленных на оси портальной стойки крана, причем грузовой канат запасован таким образом, что неподвижные блоки и подвижные блоки соединены равным числом ветвей, симметрично наклоненных к плоскости качания стрелы.
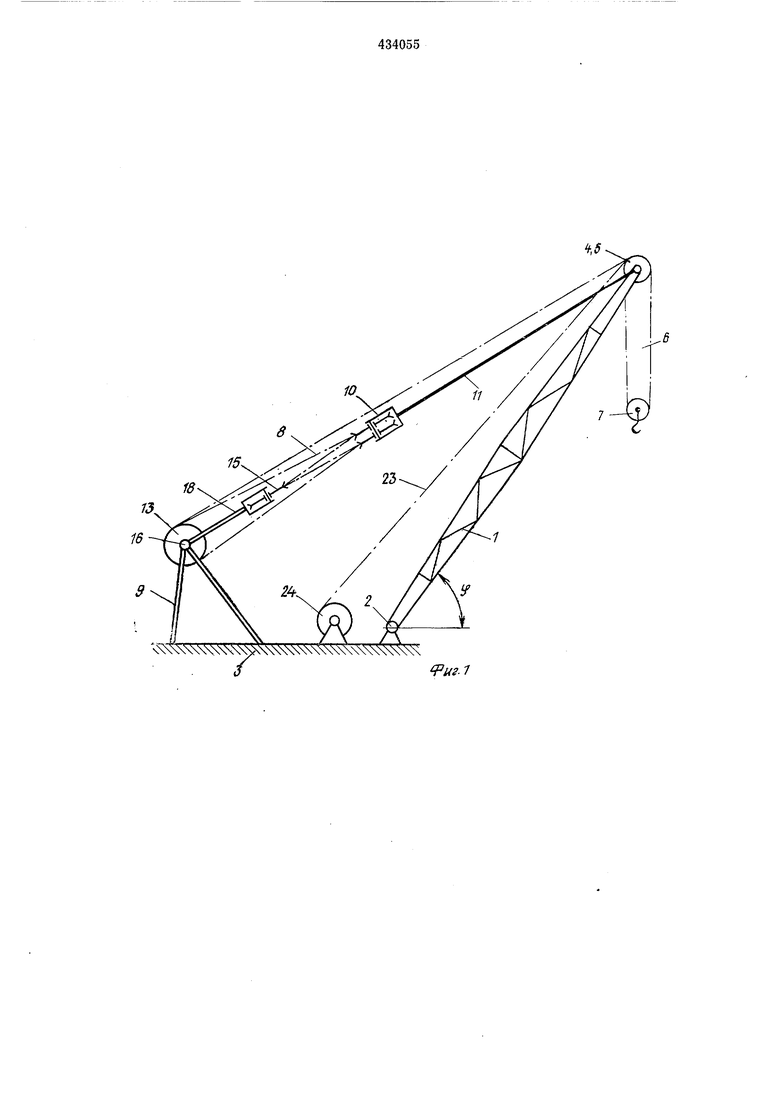
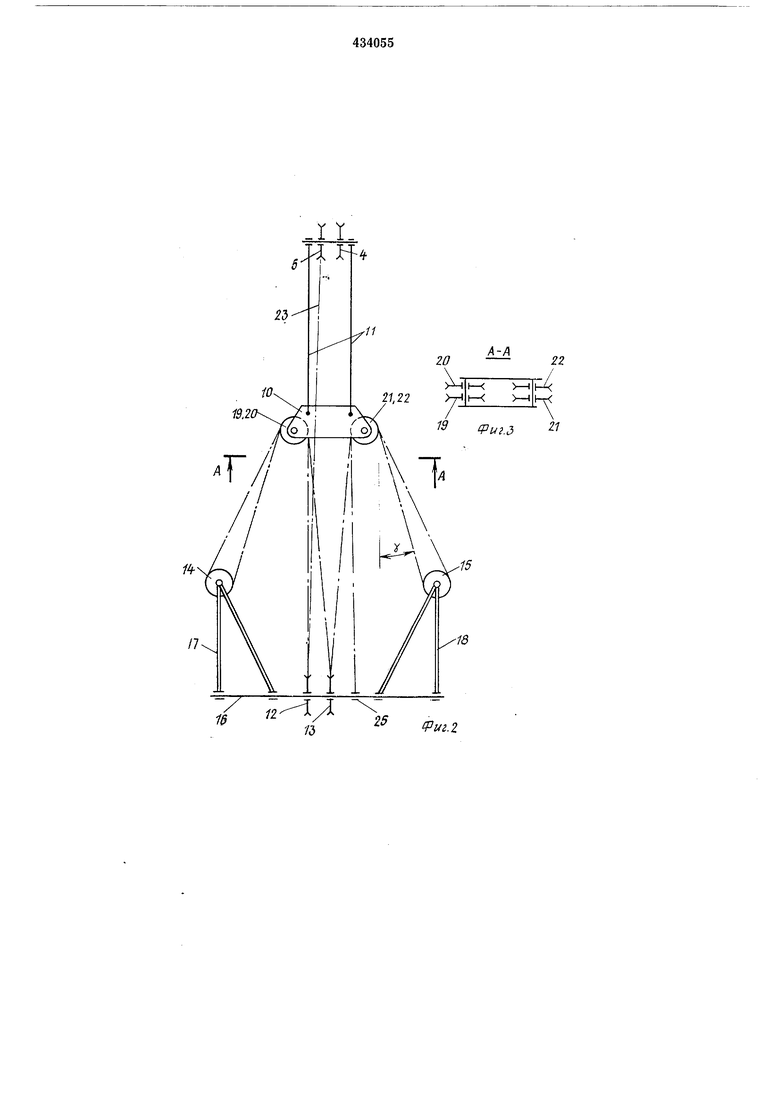
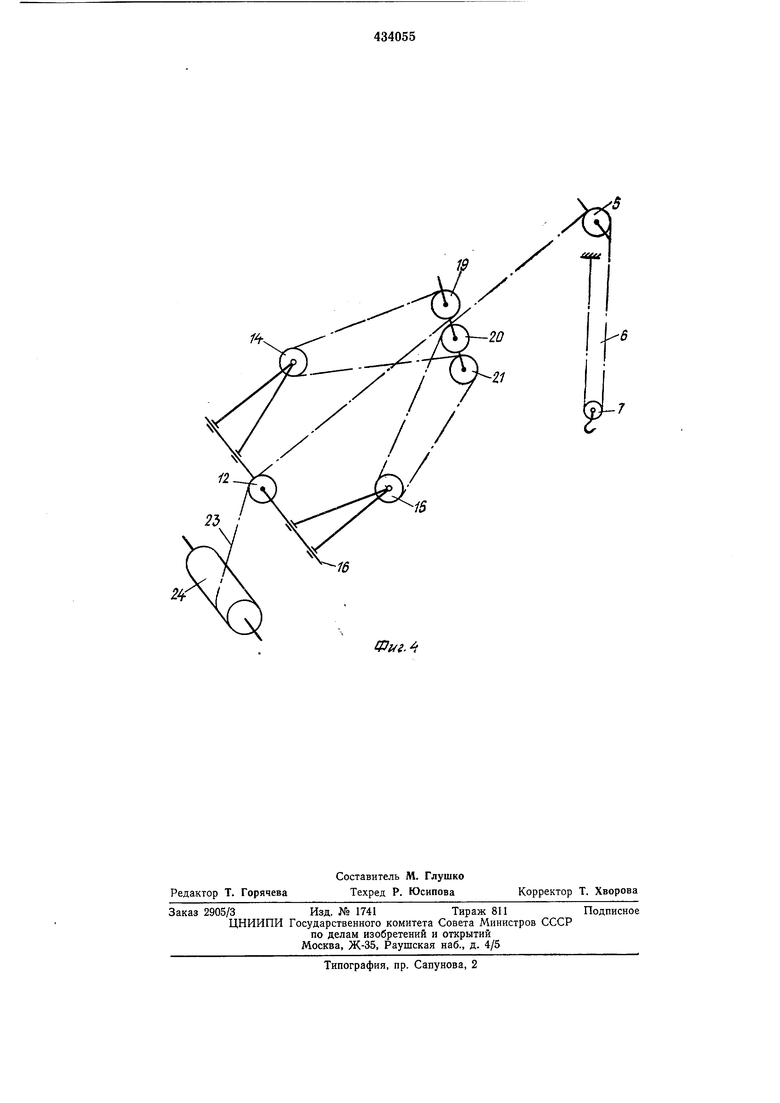
На фиг. 1 изображен общий вид описываемого крана с нелинейным уравнительным полиспастом; на фиг. 2 - нелинейный уравнительный полиспаст в плане с заведенной на него обратной ветвью грузового каната; на фиг. 3 - размещение блоков на подвижной обойме уравнительного полиспаста; на фиг. 4 - схема
запасовки нелинейного уравнительного полиспаста прямой ветвью грузового каната.
Кран включает качающуюся стрелу 1, укрепленную одним нижним шарниром 2 на основании 3 крана. На оголовке стрелы 1 размещены блоки 4 и 5 грузового полиспаста 6, удерживающего крюковую подвеску 7.
Нелинейный уравнительный полиспаст 8 размещен на нортальной стойке 9. Подвижная обойма 10 блоков уравнительного полиспаста 8 соединена с оголовком стрелы 1 оттяжками 11. Уравнительный полиспаст состоит из средних 12 и 13 и боковых 14 и 15 неподвижных блоков. Средние неподвижные блоки 12 и 13
размещены на оси 16, укрепленной на портальной стойке 9. Боковые блоки 14 и 15 размещены на концах выдвинутых в сторону стрелы кронштейнов 17 и 18, шарнирно установленных на осн 16 портальной стойки 9.
Подвижная обойма 10 уравнительного полиспаста содержит две пары блоков 19. 20 и 21, 22. Грузовой канат 23 от барабана 24 грузовой лебедки через блок 4 на оголовке стрелы 1 проведен на грузовой .полиспаст 6, а далее через блок крюковой подвески 7, блок 5 на оголовке стрелы грузовой канат 23 заведен на уравнительный полиспаст 8. Из блока 5 грузовой канат 23 заведен вначале на средний неподвижный блок 12, а затем проведен последовательно через блоки 19, 14, 20, 13, 21, 15
и 22 и-закреплен в зажиме 25 на оси 16 портальной стойки 9.
Таким образом, благодаря такому исполнению, нелинейный уравнительный полиснаст, кроме прямых, примерно параллельных ветвей, которые проходят через средние неподвижные блоки 12 и 13 и зажим 25, содержит две группы равных по количеству симметрично наклоненных к плоскости качания стрелы боковых ветвей грузового каната, проходящ:их через боковые неподвижные блоки 14 и 15.
По этой схеме (см. фиг. 2) грузовой канат 23 из барабана 24 проведен вначале через грузовой полиспаст 6, а затем обратной ветвью заведен на уравнительный полиспаст 8.
Возможна другая запасовка каната, показанная на фиг. 4. Здесь грузовой канат 23 из барабана 24 через блок 12 заведен наоборот вначале на уравнительный полиспаст 8, а затем на грузовой полиспаст 6. Для этого грузовой канат 23 через блок 12 проведен последовательно через блоки 19, 14, 21, 15 и 20 уравнительного полиспаста и после этого через блок 5 - на грузовой полиспаст 6.
В схеме запасовки каната, показанной на фиг. 2, уравнительный полиспаст имеет пять прямых и четыре наклонных ветвей, в схеме на фиг. 4 - одну прямую и четыре наклонных ветвей.
Известным образом число прямых и наклонных ветвей уравнительного полиспаста может быть соответственно изменено, так же как и кратность грузового полиспаста.
Качание стрелы 1 относительно ее шарнира 2 осуществляется любым из известных механизмов, например полиспастны.м, реечным, гидравлическим.
Выравнивание горизонтальной траектории движения груза при качании стрелы 1 происходит следующим образом.
При подъеме, нанример, стрелы 1 вверх подвижная обойма 10 блоков уравнительного полиспаста движется в сторону портальной стойки 9 и ветви грузового каната на уравнительном полиспасте укорачиваются, а угол у наклона боковых ветвей увеличивается. Избыток длины грузового каната с уравнительного полиспаста уходит на грузовой полиспаст 6, благодаря чему крюковая подвеска 7 по отношению к оголовку стрелы опускается.
Вертикальная скорость оголовка стрелы 1 крана изменяется но закону cos ф, где ф - 5 угол наклона стрелы к горизонту, т. е. эта скорость по мере подъема стрелы уменьшается. Одновременно с этим кратность нелинейного уравнительного полиспаста
л Z -f tncosf,
где Z - число средних прямых и т - число боковых наклонных ветвей, за счет увеличения угла у наклона боковых ветвей по мере подъема стрелы также уменьшается, т. е. изменение кратности нелинейного уравнительного полиспаста при качанни стрелы следует за изменением вертикальной скорости оголовка стрелы, что позволяет получить более высокую степень выравнивания горизонтальной
0 траектории движения груза.
Выбором числа Z прямых и т боковых наклонных ветвей расстояния между боковыми блоками 14 и 15 нелинейного уравнительного полиспаста, а также длины оттяжек 11 добиваются такого положения, при котором за счет изменения длин ветвей грузового каната на уравнительном и грузовом полиспастах крюковая подвеска 7 при качании стрелы примерно остается на одном уровне и груз перемеща0 ется по траектории, близкой к горизонтальной.
Предмет изобретения
Грузоподъемный кран с изменением вылета посредством качания стрелы, оголовок которой соединен с портальной стойкой посредстном уравнительного полиспаста, образованного ветвями грузового каната с подвижными и неподвижными блоками, отличаюЩ|Ийся тем, что, с целью улучшения выравнивания горизонтальной траектории движения груза при качании стрелы, неподвижные блоки полиспаста размещены на концах кронштейнов, шарнирно установленных на оси портальной стойки, нричем грузовой канат запасован таким
образом, что неподвижные блоки и подвижные блоки соединены равным числом ветвей, симметрично наклоненных к плоскости качания стрелы.
Г
иг.1
n.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРЕЛОВОЙ ПОДЪЕЛ1НЫЙ КРАН | 1972 |
|
SU424803A1 |
| Стреловый подъемный кран | 1971 |
|
SU430041A1 |
| КРАН С ПРЯМОЙ ПОДЪЕМНОЙ СТРЕЛОЙ | 1967 |
|
SU206046A1 |
| Стреловой подъемный кран с управляемым гуськом | 1973 |
|
SU479720A1 |
| МЕХАНИЗМ ПОДЪЕМА ПЛАВУЧЕГО КРАНА | 1992 |
|
RU2041154C1 |
| ПОДЪЕМНЫЙ КРАН С ИЗМЕНЕНИЕМ ВЫЛЕТА ПОСРЕДСТВОМ КАЧАНИЯ СТРЕЛЫ | 1967 |
|
SU203875A1 |
| КРАН С ПРЯМОЙ ПОДЪЕМНОЙ СТРЕЛОЙ | 1968 |
|
SU208915A1 |
| Грузоподъемный кран | 1984 |
|
SU1402556A1 |
| Грузоподъемный кран | 1979 |
|
SU885143A1 |
| БАШЕННЫЙ КРАН | 1967 |
|
SU206044A1 |
/2
/
/3
м1ь -i|l-4
21,22
rI- -
/5 ,,j 27
/г.г
Фиг.
