Известны устройства для стабилизации положения груза в период торможения крановых механизмов, содержащие механизмы комбинированного торможения с магнитными усилителями, присоединенные к электродвигателю крана, и датчик отклонения грузового каната от вертикали.
Предложенное устройство отличается тем, что магнитные усилители электродинамического и механического тормозов связаны с датчиком отклонения груза от вертикали.
Благодаря этому повышается надежность работы устройства.
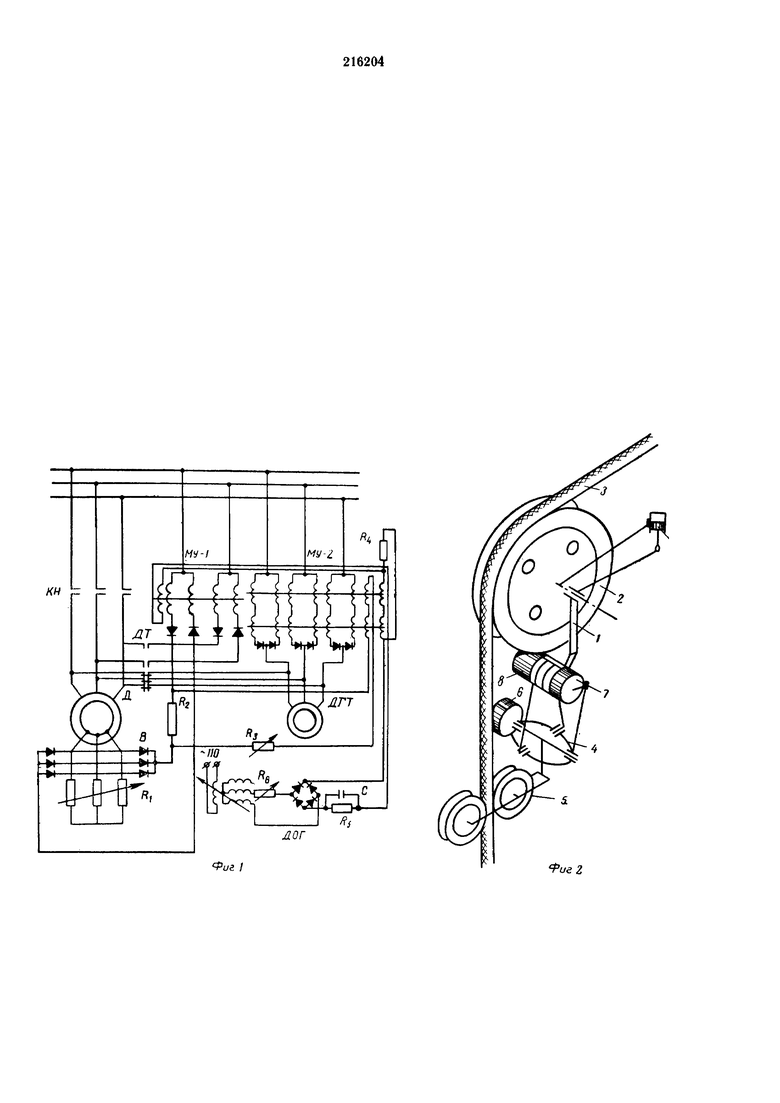
На фиг. 1 приведена электрическая схема описываемого устройства; на фиг. 2 - датчик отклонения груза по вертикали.
Устройство стабилизации (успокоения) груза, перемещаемого подъемным краном, содержит крановый двигатель Д с пускорегулировочным сопротивлением R1 и аппаратурой управления, механизм для комбинированного торможения, состоящий из силового выпрямителя В, магнитного усилителя МУ-1, магнитного усилителя МУ-2, колодочного тормоза с гидротолкателем, приводимого двигателем (ДГТ), установочных и добавочных сопротивлений R2, R3, R4 и датчика отклонения груза (ДОГ) с последовательным звеном коррекции R5С и установочным сопротивлением R6.
Датчик отклонения груза (ДОГ) состоит из подвески 1 (см. фиг. 2), укрепленной шарнирно на оси концевого блока 2, огибаемого грузовым канатом 3, карданного подвеса 4, к внутренней оси которого жестко крепят обойму роликов 5, между которыми проходит грузовой канат, датчиков 6 и 7 углового отклонения каната грузового отвеса 8 и демпфера 9.
При отключении кранового двигателя Д от сети с помощью контактора динамического торможения ДТ в статор двигателя из цепи магнитного усилителя МУЛ поступает выпрямленный ток, а со стороны ротора после выпрямления выпрямителем В в статор поступает силовой ток, создающий основное магнитное поле в расточке статора. Силовой ток проходит через сопротивление, частично ответвляется в обмотку управления магнитного усилителя МУ-2 и насыщает его. Таким образом происходит динамическое торможение при полностью отторможенном колодочном тормозе.
В первый момент процесса торможения груз отклоняется от вертикали и приходит в колебательное движение, если на систему торможения не оказывается регулирующее воздействие со стороны датчика отклонения ДОГ. При его наличии отклонение груза через ролики 5 приводит к угловому отклонению ротора датчика 6 или датчика 7, соединенного с карданным подвесом 4.
Отклонение измеряется относительно вертикали, занимаемой грузовым отвесом 8, оснащенным демпфером 9 для предотвращения раскачивания и подверженности толчкам.
Угловое отклонение ротора одного из датчиков приводит к появлению тока, пропорционального этому отклонению и его производной. Этот ток, проходя по обмоткам управления магнитных усилителей МУ-1 и МУ-2, снижает тормозной момент динамического торможения, не влияя пока на величину нормального давления колодок на тормозной шкив. Торможение становится менее интенсивным, т.е. уменьшается замедление механизма. Это снижает, амплитуду первого отклонения груза. Кроме того, он начинает возвращаться к вертикали, производная отклонения сменяет знак, и ток в обмотках управления МУ-1 и МУ-2 резко снижается. Следовательно, периоду возвращения груза к вертикали соответствует резкое увеличение тормозного момента, что не позволит грузу перейти точку отвесного положения.
Если регулирующее действие осуществляется при малых скоростях и при действии на механизм движущих моментов, то изменение тормозного момента происходит благодаря регулируемому колодочному тормозу путем изменения подмагничивания магнитного усилителя МУ-2.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ | 1969 |
|
SU253215A1 |
| ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ЛИФТА | 2013 |
|
RU2561682C2 |
| Устройство для торможения асинхронного электродвигателя | 1982 |
|
SU1086532A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАЗДЕЛЬНЫМИГИДРОПРИВОДАМИ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯМОСТОВОГО КРАНА | 1971 |
|
SU424802A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЗАЦИЕЙ ПУСКО-ТОРМОЗНЫХ РЕЖИМОВ ДРОССЕЛЬНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2311725C1 |
| Электропривод | 1974 |
|
SU720647A1 |
| СПОСОБ ЗАЩИТЫ ТЯГОВОГО КАНАТА ЭКСКАВАТОРА-ДРАГЛАЙНА ОТ КРИТИЧЕСКИХ НАГРУЗОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА О'АЛЕКС,А) | 1994 |
|
RU2082855C1 |
| КОМБИНИРОВАННЫЙ ЛЕНТОЧНО-КОЛОДОЧНЫЙ И ИНДУКТОРНЫЙ ТОРМОЗ | 2009 |
|
RU2414633C2 |
Устройство для стабилизации положения груза в период торможения крановых механизмов, содержащее механизмы комбинированного торможения с магнитными усилителями, присоединенные к электродвигателю крана, и датчик отклонения грузового каната от вертикали, отличающееся тем, что, с целью повышения надежности работы устройства, за счет регулирования тормозного момента, магнитные усилители электродинамического и механического тормозов связаны с датчиком отклонения груза от вертикали.
