1
Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам для управления раздельными гидроприводами механизма передвижения кранов.
Известны устройства для управления гидроприводами, содержащие роторные обмотки сельсин-датчика, соединенные с роторными обмотками сельсин-приемников, каждый из которых установлен на насосе системы кинематической обратной связи, расположенной между исполнительными двигателями и сельсин-приемниками, и ручку управления.
Однако в известных устройствах невозможно синхронизировать движение гидроприводов различных типоразмеров, а также обеспечить заданное отклонение грузового каната от вертикали.
Цель изобретения - обеспечить синхронизацию движения гидроприводов различных типоразмеров и обеспечить отклонение грузового каната от вертикали управления.
Для этого система кинематической обратной связи снабжена программными лекалами неидентичпого профиля, а ручка управления выполнена блокирующейся посредством центрирующего клина-защелки, соосно с которым установлена кнопка с контактами управления пуском насосов.
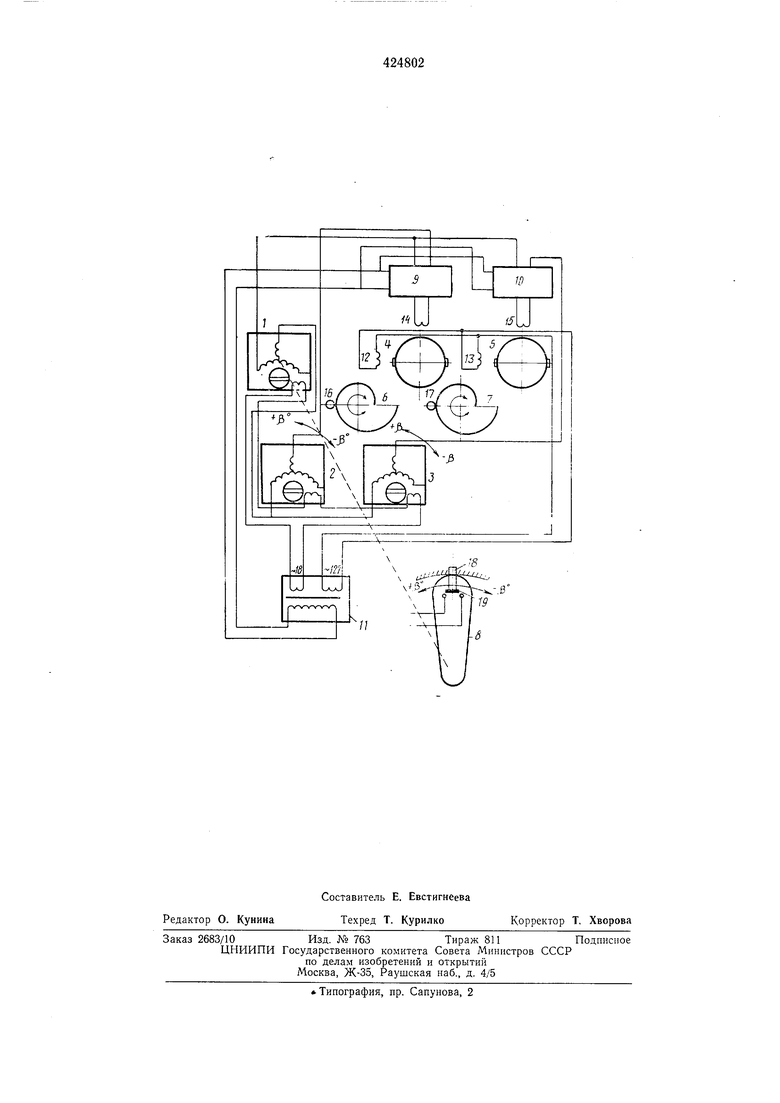
На чертеже изображена принципиальная схема предлагаемого устройства.
Устройство состоит нз сельсина-датчика 1, сельсинов-приемников 2 и 3, исполнительных двигателей, выполненных в виде серводвигателей 4 и 5 и программных лекал 6 н 7. Ротор
сельсина-датчика 1 расположеп па одпой оси с рукояткой 8 управления, задающей скорость и направление движения мащнны в целом.
Роторные обмотки сельсина-датчика 1 соединены с роторнымн обмотками сельсиновприемников 2 и 3, каждый из которых установлен на своем насосе, и с полупроводниковыми усилителями 9 и 10. Статорные обмотки сельсина-датчика I и сельсщюв-нриемников 2 и 3 соединены последовательно и пптаются
от трансформатора 11, от которого питаются также обмотки 12 и 13 возбуждения серводвигателей 4 и 5 соответственно. Обмотки 14 и 15 управления последних подключе 1ы к усилителям 9 и 10 соответственно.
Между серводвигателями 4 и 5 п соответственно сельсинами-приемниками 2 н 3 имеется кинематическая обратная связь, в систему которой включены программные лекала 6 и 7, расположенные на оси вала силового управлеппя соответствующего насоса, н роликн 16
и 17, связанные, например, рычагами с валом
ротора соответствуюп.;нх сельсннов-приемпнков 2 и 3.
Рукоятка 8 управления выполнена с заи1,елкой 18, соосно с которой расположена кнопка 19 для замыкания контактов, связанных с обмоткой возбуждения пускателей приводных электродвигателей насосов. Рукоятка 8 имеет возможность поворота на угол ±:|3 только после утапливания защелки 18, нажимающей при этом на кнопку 19.
После включения устройства в сеть по всем его узлам подается питание через трансформатор 11. В исходном положении сельсины работают в трансформаторном режиме и сигнал рассогласования между сельсином-датчиком 1 и сельсинами-приемниками 2 и 3 отсутствует. Серводвигатели 4 и 5 не вращаются, так как на их валах развивается большой статический удерживающий тормозной момент за счет подачи напряжения в обмотки возСуждения.
Нажатием на защелку 18 освобождают рукоятку 8. При этом через кнопку 19 включаются пускатели приводных двигателей, после чего поворачивают рукоятку 8 на угол ±|3, на который поворачивается и ротор сельсинадатчика 1, вызывая тем самым электрический сигнал рассогласования в системе сельсиндатчик 1 - сельсины-нриемники 2 и 3. Сигнал рассогласования усиливается в усилителях 9 и 10 и подается па обмотки 14 и 15 управления серводвигателей 4 и 5. Последние начинают вращаться и через лекала 6 и 7 и ролики 16 и 17 сводят сигнал рассогласования к нулю. При этом роторы сельсинов-приемников 2 и 3 поворачиваются на угол |3, равный углу поворота ротора сельсина-датчика 1.
Предложенное устройство управления и синхронизации движения раздельных регулируемых гидростатических приводов грузоподъемных кранов обеспечивает равенство скоростей гидромоторов на холостом ходу независимо от различий в их скоростных характеристиках, либо типоразмерах. Это достигается включением в систему обратной связи между серводвигателями и сельсинами-приемниками программных лекал, благодаря которым кран работает с заранее вычисленной ограниченной силой перекоса. При автоматизированном управлении и заранее известной тахограмме, приведенных массах гидромоторов и жидкости в них, массах поступательно движущихся частей крана, массе груза, высоте его подвески, величине зазоров в кинематической цепи привода, жесткости элементов валопроводов, величине статического сопротивления передвижению крана, коэффициенте вязкого трения в гидроприводах, коэффициенте сопротивления демпфирующего звена валопроводов крана выполнение профиля лекал с учетом этих данных обеспечивает оптимальное по коэффициенту динамичности или величине отклонения груза управление крановыми гидроприводами.
Кроме того, выполнение рукоятки управления с блокировкой ее поворота до включения нускателей электродвигателей насосов гидроприводов предотвращает поломку механической части гидравлической следящей системы, встроенной в каждый насос.
Предмет изобретения
Устройство для управления раздельными гидроприводами механизма передвижения мостового крана, содержащее роторные обмотки сельсин-датчика, соединенные с роторными обмотками сельсин-нриемников, каждый из которых установлен на насосе системы кинематической о брат,ной связи, расположенной между исполнительными двигателями и сельсин-приемниками, и ручку управления, отличающееся тем, что, с целью обеспечения синхронизации движения гидроприводов различных типоразмеров и обеспечения отклонения грузового каната от вертикали управления, система кинематической обратной связи снабжена программными лекалами неидентичного профиля, а ручка унравления выполнена блокирующейся носредством центрирующего клина-защелки, соосно с которым установлена кнопка с контактами управления пуском насосов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидропривода лебедок сдвоенного крана | 1989 |
|
SU1784569A1 |
| Устройство для управления гидроприводами механизмов передвижения крана мостового типа | 1980 |
|
SU901245A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU286916A1 |
| Устройство для управления гидроприводами механизмов передвижения крана мостового типа | 1980 |
|
SU901241A1 |
| Устройство синхронизации механиз-MOB пЕРЕдВижЕНия KPAHA | 1978 |
|
SU798021A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1967 |
|
SU190458A1 |
| УСТРОЙСТВО для НАВЕДЕНИЯ РАБОЧЕГО ОРГАНА МОСТОВОГО КРАНА И.\ ОБРАБАТЫВАЕМЫЙ ОБЪЕКТ | 1971 |
|
SU310861A1 |
| Устройство управления гидроприводом механизма крана | 1989 |
|
SU1724956A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |
| Устройство для измерения и задания нагрузки на долото | 1981 |
|
SU1024585A1 |