Предлагаемый дозатор предназначен для автоматических конвейерных весов сыпучих материалов. В известных весовых дозаторах сыпучих материалов, содержащих ленточный транспортер с регулируемым приводом и датчиком скорости движения ленты, например, тахогенератором переменного тока, рычажный весоизмерительный механизм, связанный с укрепленной на опоре рамой транспортера, угол наклона которой соответствует весу материала, находящегося на ленте, и блок сравнения заданной и фактической производительности, непрерывную дозировку материала осуществляют путем взвешивания материала, находящегося на ленте транспортера, и изменения скорости движения его ленты в зависимости от веса находящегося на ней материала и заданной производительности дозатора. Это требует сложной электромеханической схемы измерения производительности дозатора и наличие большого количества преобразований измеряемых первичных величин.
В предлагаемом дозаторе, с целью повышения надежности и точности дозирования, выходной рычаг весоизмерительного механизма снабжен ферродинамическим датчиком, соединенным выходом с блоком сравнения, сигнал рассогласования с которого введен на управляющий вход привода ленточного транспортера, причем обмотка возбуждения ферродинамического датчика соединена с выходной обмоткой тахогенератора переменного тока.
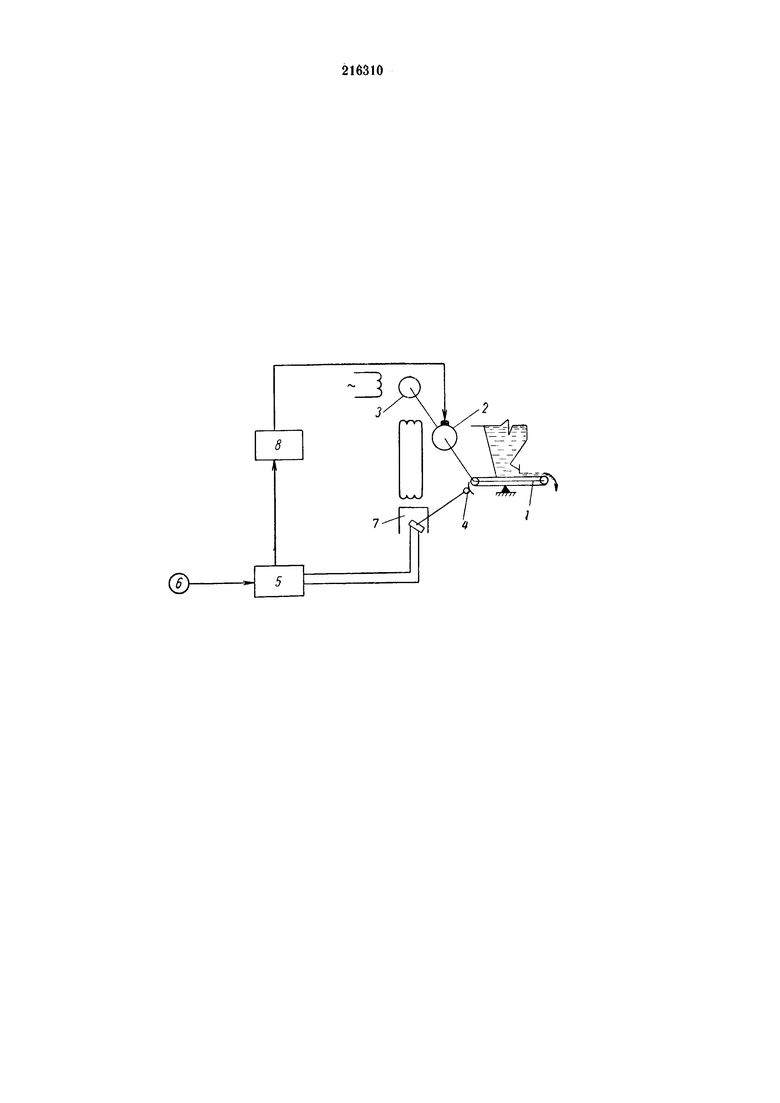
На чертеже приведена принципиальная структурная схема предлагаемого весового дозатора. Он содержит ленточный транспортер 1 с регулируемым приводом 2 и датчиком 3 скорости движения ленты, весоизмерительный механизм 4, блок сравнения 5 сигналов задатчика 6, ферродинамический датчик 7 веса и управляющий блок 8.
Одна из обмоток датчика 3 питается напряжением переменного тока, а вторая обмотка питает обмотку возбуждения ферродинамического датчика 7. Таким образом, возбуждение датчика 7 пропорционально скорости движения ленты транспортера 1. Ось рамки датчика 7 связана с весоизмерительным устройством таким образом, чтобы обеспечить пропорциональность между весом материала на ленте транспортера 1 и углом поворота рамки датчика 7. Таким образом, выходное напряжение датчика 7 пропорционально производительности дозатора.
Схема регулирования работает следующим образом. С помощью задатчика 6 устанавливают требуемую производительность весового дозатора. Полученный от задатчика 6 сигнал сравнивают с сигналом фактической производительности дозатора, а сигнал рассогласования-подают на вход управляющего блока привода ленточного транспортера.
| название | год | авторы | номер документа |
|---|---|---|---|
| "Весовой дозатор сыпучих материалов непрерывного действия | 1973 |
|
SU449253A1 |
| Ленточный дозатор сыпучих материалов | 1974 |
|
SU670817A1 |
| ДОЗАТОР ВЕСОВОЙ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2003 |
|
RU2260775C2 |
| ВЕСОВОЙ ДОЗАТОР НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 1972 |
|
SU344285A1 |
| АВТОМАТИЧЕСКИЙ ДОЗАТОР | 1972 |
|
SU336527A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1059443A1 |
| Дозатор сыпучих материалов | 1974 |
|
SU670816A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1045000A1 |
| Устройство для автоматического управления дозатором | 1980 |
|
SU897292A1 |
| ДОЗАТОР СЫПУЧИХ МАТЕРИАЛОВ | 1995 |
|
RU2098774C1 |
Весовой дозатор сыпучих материалов, содержащий ленточный транспортер с регулируемым приводом и датчиком скорости движения ленты, например, тахогенератором переменного тока, рычажный весоизмерительный механизм, связанный с укрепленной на опоре рамой транспортера, угол наклона которой соответствует весу материала, находящегося на ленте, и блок сравнения заданной и фактической производительности, отличающийся тем, что, с целью повышения надежности и точности дозирования, выходной рычаг весоизмерительного механизма снабжен ферродинамическим датчиком, соединенным выходом с блоком сравнения, сигнал рассогласования с которого введен на управляющий вход привода ленточного транспортера, причем обмотка возбуждения ферродинамического датчика соединена с выходной обмоткой тахогенератора переменного тока.
