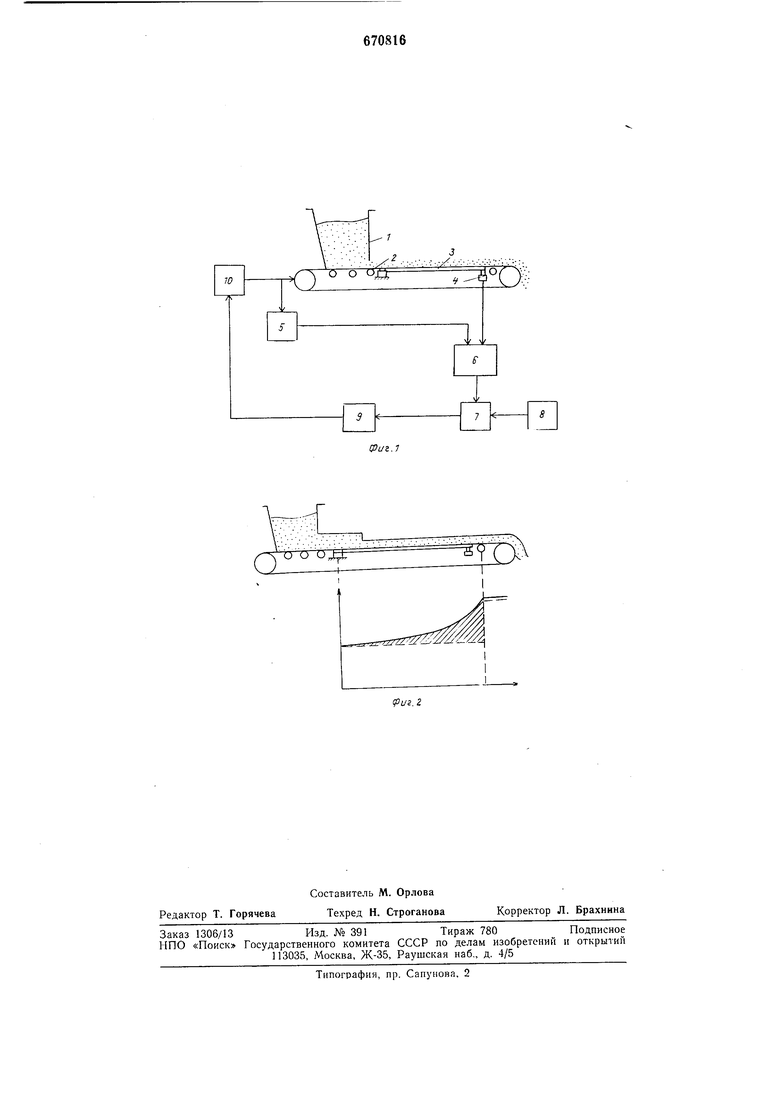
На фиг. 1 показана принципиальная схема предлагаемого дозатора; на фиг. 2 - весоизмерительное устройство и зависимость выходного сигнала силоизмерительного преобразователя в функции заполнения длины измерительного участка.
Дозатор сыпучих материалов содержит загрузочный бункер 1, установленный над ленточным транспортером 2. На выходе транспортера 2 под лентой установлена весовая площадка 3, передающая усилие на силоизмерительный преобразователь 4. Скорость перемещения ленты транспортера 2 измеряется датчиком скорости 5. Выход с силоизмерительного преобразователя 4 и выход с датчика скорости 5 соединены с входами множительного устройства 6. Выход с множительного устройства 6 соединен с одним из входов регулятора 7. Другой вход регулятора 7 соединен с выходом задатчика 8. Выход регулятора 7 соединен с входом усилителя 9 мощности, выход которого соединен с двигателем привода 10 ленточного транспортера.
Предлагаемый дозатор работает следующим образом.
Дозируемый материал через щель бункера 1 вытягивается лентой транспортера 2, проходит через весовую площадку 3. Весовая площадка 3 передает усилие, создаваемое весом проходящего материала, на преобразователь 4. При этом скачкообразное изменение массы материала, поступающего на весоизмерительное устройство, передается площадкой 3 в виде усилия на силоизмерительный преобразователь 4 таким образом, что обеспечивается соответствие между выходным и измеренным значением веса с он1ибкой значительно меньщей, чем у известной конструкции дозатора. Одновременно измеряется скорость перемещения ленты транспортера 2 датчиком скорости 5. Выходные сигналы с силоизмерительного преобразователя 4 и датчика скорости 5, соответствующие текущему значению веса материала и скорости его перемещения, поступают на входы множительного устройства 6. С выхода множительного устройства 6 на один из входов регулятора 7 передается сигнал, соответствующий измеряемому значению производительности. В регуляторе 7 измеряемое значение производительности постоянно сравнивается с установленным заданным
значением, которое подается на другой вход регулятора 7 с выхода задатчика 8. В случае несовпадения этих двух значений регулятор 7 через усилитель 9 и двигатель привода ленточного транспортера изменяет скорость ленты таким образом, что измеряемая производительность дозатора становится равной заданному значению.
Формула изобретения
Дозатор сыпучих материалов, содержащий загрузочный бункер, ленточный транспортер, весоизмерительное устройство, размещенное под лентой транспортера, силоизмерительный преобразователь, датчик
скорости, множительное устройство, регулятор, задатчик, усилитель мощности и двигатель привода ленточного транспортера, отличающийся тем, что, с целью повышения точности дозирования, весоизмерительное устройство опирается на силоизмерительный преобразователь, установленный от оси выходного барабана ленточного транспортера на расстоянни от 0,5 до 3 диаметров ведущего барабана.
Источники информации,
принятые во внимание при экспертизе
1.Орлов С. П. Автоматические весовые дозаторы непрерывного действия. Обзор зарубежных конструкций. М., ОНТИПрибор, 1967, с. 13.
2.Карпин Е. Б. Средства автоматизации для измерения и дозирования массы. М., 1971, с. 387.
3.Авторское свидетельство СССР № 40763, кл. G 01G 11/02, 09.02.34.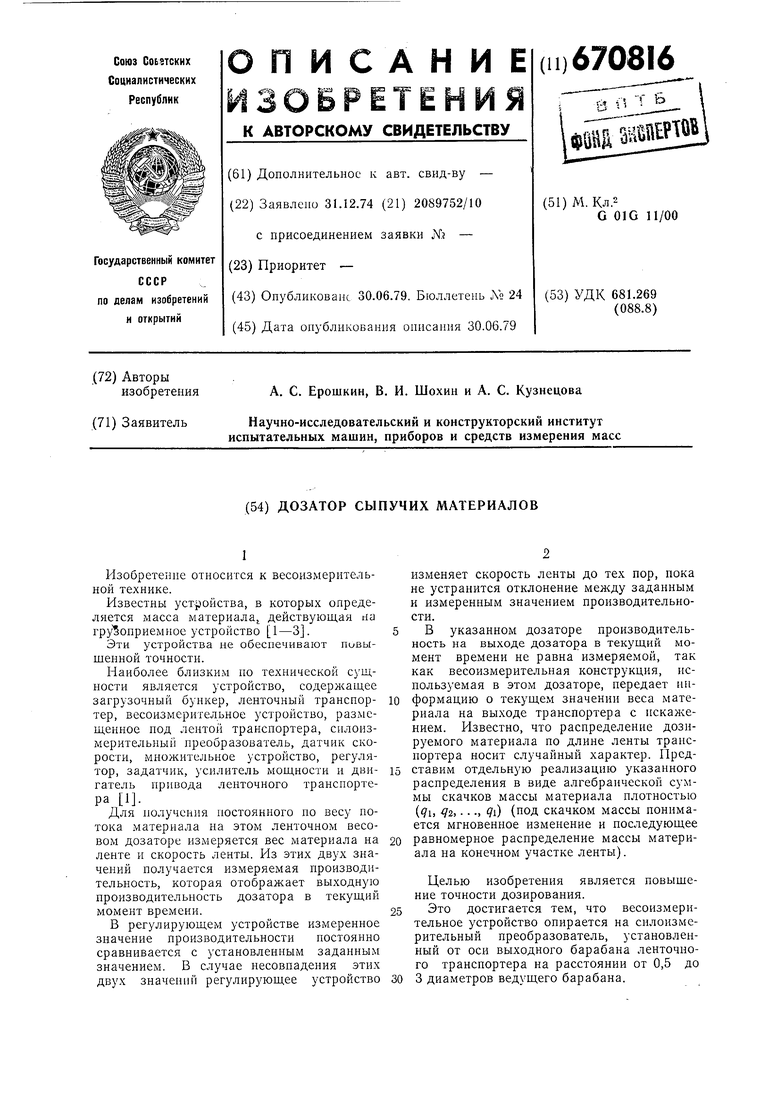
| название | год | авторы | номер документа |
|---|---|---|---|
| Ленточный дозатор сыпучих материалов | 1974 |
|
SU670817A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU951082A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1980 |
|
SU932265A1 |
| Весовой дозатор непрерывного действия | 1975 |
|
SU670818A1 |
| Дозатор непрерывного действия | 1985 |
|
SU1278598A1 |
| Весовой дозатор непрерывного действия | 1977 |
|
SU678321A1 |
| Дозатор непрерывного действия | 1980 |
|
SU934234A1 |
| Весовой дозатор сыпучих материалов непрерывного действия | 1980 |
|
SU1076765A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1045001A1 |