Известны машины, например двигатели внутреннего сгорания, поршневые компрессоры и насосы, которые являются неуравновешенными в отношении сил инерции движущихся деталей. Поскольку такая неуравновешенность часто бывает причиной опасных вибраций, то на подобных машинах применяют уравновешивающие механизмы, состоящие из противовесов, вращающихся в определенном направлении и с определенной угловой скоростью, и из привода к ним, обычно выполняемого в виде шестеренчатой передачи.
Система инерционных сил движущихся деталей упомянутых машин часто приводится к одной равнодействующей силе (главному вектору), вращающейся в плоскости, перпендикулярной оси коленчатого вала, и приложенной в точке пересечения этой плоскости с осью коленчатого вала. При этом годограф главного вектора в общем случае представляет собой эллипс.
Уравновешивание подобной системы сил можно произвести двумя вращающимися в разные стороны вокруг оси коленчатого вала противовесами, расположенными в плоскости действия главного вектора. Обычная конструкция перечисленных выше машин не позволяет установить противовесы на оси коленчатого вала в плоскости действия главного вектора. Поэтому уравновешивание приходится вести с помощью двух пар противовесов, вращающихся попарно в разные стороны вокруг оси коленчатого вала, причем расстояния от плоскостей вращения противовесов до плоскости действия главного вектора назначаются таким образом, чтобы равнодействующая каждой пары противовесов находилась в плоскости действия главного вектора.
Существенным недостатком этой схемы уравновешивающего механизма является сложность конструкции привода, поскольку для передачи вращения от коленчатого вала к противовесам, расположенным на нем с двух сторон и вращающимся в разные стороны, необходимы два разветвленных редуктора. В связи с этим уравновешивающий механизм, выполненный по описанной схеме, не применяется в полном виде. В частном случае, когда годографом главного вектора является не эллипс, а круг, т.е. когда уравновешивание можно произвести с помощью одной пары противовесов, подобные уравновешивающие механизмы находят применение, хотя привод к противовесам остается достаточно сложным.
Предлагаемый механизм отличается от известных тем, что состоит из двух пар противовесов, причем привод этого механизма конструктивно прост, а количество шестерен привода меньше, чем у описанных выше механизмов. Указанные преимущества предлагаемого уравновешивающего механизма достигаются за счет кососимметричного расположения противовесов соответствующих пар относительно плоскости действия главного вектора.
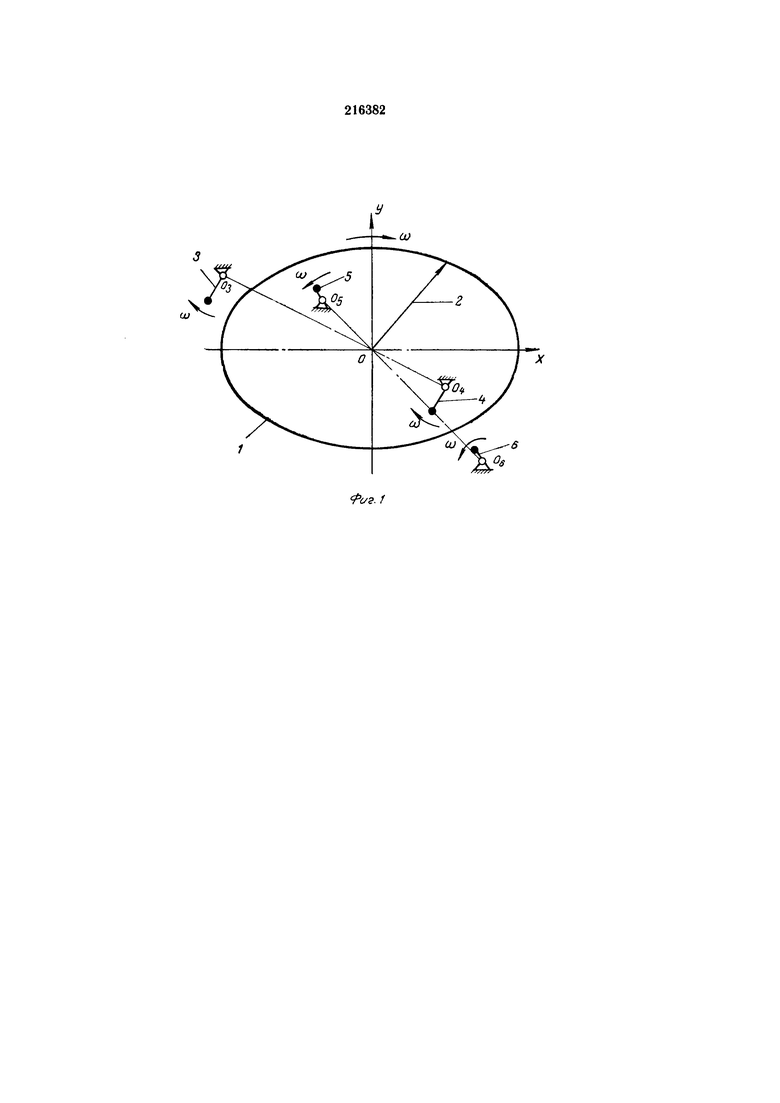
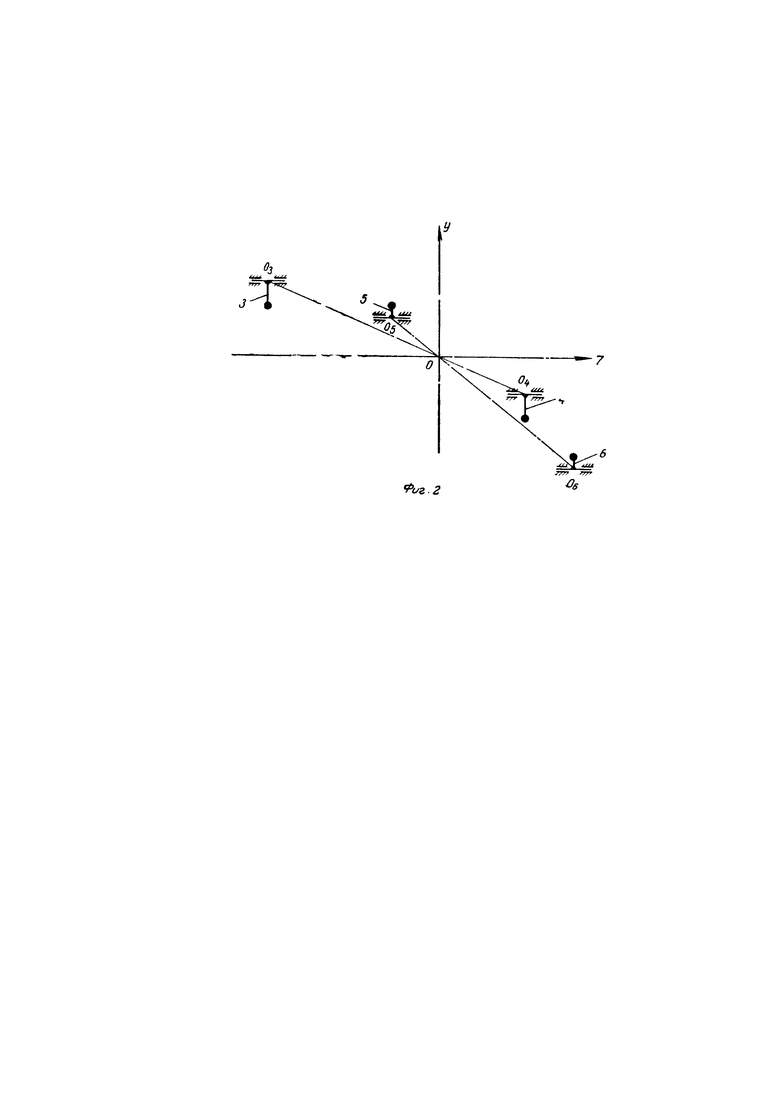
На фиг. 1 представлена проекция на плоскость, перпендикулярную оси вращения вала, одной из возможных схем расположения противовесов предлагаемого уравновешивающего механизма; на фиг. 2 - проекция противовесов на плоскость оси вращения.
Плоскость действия главного вектора совмещена с плоскостью ХОУ системы координат (направление вращения главного вектора - по часовой стрелке).
На чертежах приняты следующие обозначения: 1 - годограф главного вектора; 2 - главный вектор, соответствующий некоторому моменту времени; 3 и 4 - противовесы первой пары; 5 и 6 - противовесы второй пары.
В общем случае основное требование к расположению противовесов в предлагаемом механизме заключается в том, чтобы точка приложения главного вектора О и точки пересечения плоскостей вращения противовесов соответствующих пар с их осями (О3, О4 и О6) лежали на одних прямых. При этом совершенно очевидно, что, если расстояние от плоскости действия главного вектора до плоскостей вращения пары противовесов неодинаковы, то величины маховых моментов (центробежных сил) противовесов должны быть обратно пропорциональны величинам этих расстояний с тем, чтобы равнодействующая каждой пары противовесов находилась в плоскости действия главного вектора. Практически более целесообразно выполнять расстояния от плоскости действия главного вектора до плоскостей вращения противовесов одной пары одинаковыми. В этом случае противовесы одной пары будут совершенно одинаковыми. Величины равнодействующих каждой пары противовесов определяются в зависимости от величин полуосей эллипса: равнодействующая одной пары противовесов равна полусумме величин полуосей эллипса, а равнодействующая второй пары противовесов равна полуразности величин полуосей эллипса.
Направление вращения первой пары противовесов совпадает с направлением вращения главного вектора, направление вращения второй пары противовесов обратное.
Описанному механизму присуще еще одно положительное качество: он позволяет располагать противовесы самым различным образом (разумеется, не нарушая основного требования). В свою очередь, это обстоятельство позволяет выбрать наиболее оптимальную схему расположения противовесов, исходя из общей компоновки машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ ПОЛНОГО УРАВНОВЕШИВАНИЯ СИСТЕМЫ | 1971 |
|
SU306747A1 |
| МЕХАНИЗМ УРАВНОВЕШИВАНИЯ | 1971 |
|
SU322539A1 |
| МЕХАНИЗМ УРАВНОВЕШИВАНИЯ ПОРШНЕВОГО ДВИГАТЕЛЯ | 1972 |
|
SU354201A1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ МОМЕНТА СИЛ ИНЕРЦИИ НОСТУПАТЕЛЬНО ДВИЖУЩИХСЯ МАСС | 1971 |
|
SU314015A1 |
| Поршневая машина | 1988 |
|
SU1721269A1 |
| Механизм для уравновешивания переменных сил поступательно- движущихся масс первого порядка в угловых поршневых машинах | 1979 |
|
SU783518A1 |
| ПОРШНЕВАЯ МАШИНА (ЕЕ ВАРИАНТЫ) | 1994 |
|
RU2096638C1 |
| Поршневой двигатель | 1989 |
|
SU1721278A1 |
| Устройство для уравновешивания двигателя внутреннего сгорания | 1987 |
|
SU1467288A1 |
| Силовой агрегат | 2023 |
|
RU2826661C1 |
Механизм для полного уравновешивания системы переменных сил, действующих в поршневых машинах, например двигателях внутреннего сгорания, и образующих эллипсовидный годограф главного вектора, уравновешиваемого парами противовесов, отличающийся тем, что, с целью упрощения конструкции, противовесы соответствующих пар установлены кососимметрично относительно плоскости действия главного вектора, а точка приложения последнего и точки пересечения плоскостей вращения противовесов с осями их вращения лежат на одной прямой.
