Изобретение относится к области машиностроения и может быть использовано при уравновешивании момента сил инерции поступательно движущихся масс (ПДМ), например, V-образного двигателя внутреннего егорания.
Известны опособы уравновешивания мо.мента сил инерции ПДМ двигателей внутреннего сгорания с годографом суммарного вектора в виде эллипса путем установки на параллельно расположенных валах противоположно вращающихся грузов. Грузы одного вала (как правило коленчатого) подбирают таким образом, чтобы вектор их момента при вращении описывал окружность с радиусом, равным малой полуоси эллипса. Грузы других валов, вращающиеся в противоположные стороны, подбирают таким образом, чтобы момент каждого вала был равен лоловине разности большой и малой полуосей эллипса. Причем вследствие равенства моментов этих валов их суммарный момент всегда действует в одной и той же плоскости, а именно в плоскости большой оси эллипса. Суммарное действие всех моментов таково, что они полностью уравновешивают только минимальное и максимальное значения свободного момента, а в промежутках между ними часть момента остается неуравновешенной.
новешивание момента сил инерции ПДМ, изменяющегося по закону эллипса, это позволит существенно снизить уровень вибрации двигателя, облегчить коленчатый вал, упростить его конструкцию.
Для этого отношение моментов грузов выбирают равным отношению суммы полуосей эллипса к их разности. При этом предполагается, что оси валов располагаются в плоскости, перпендикулярной к плоскости больщой оси эллипса.
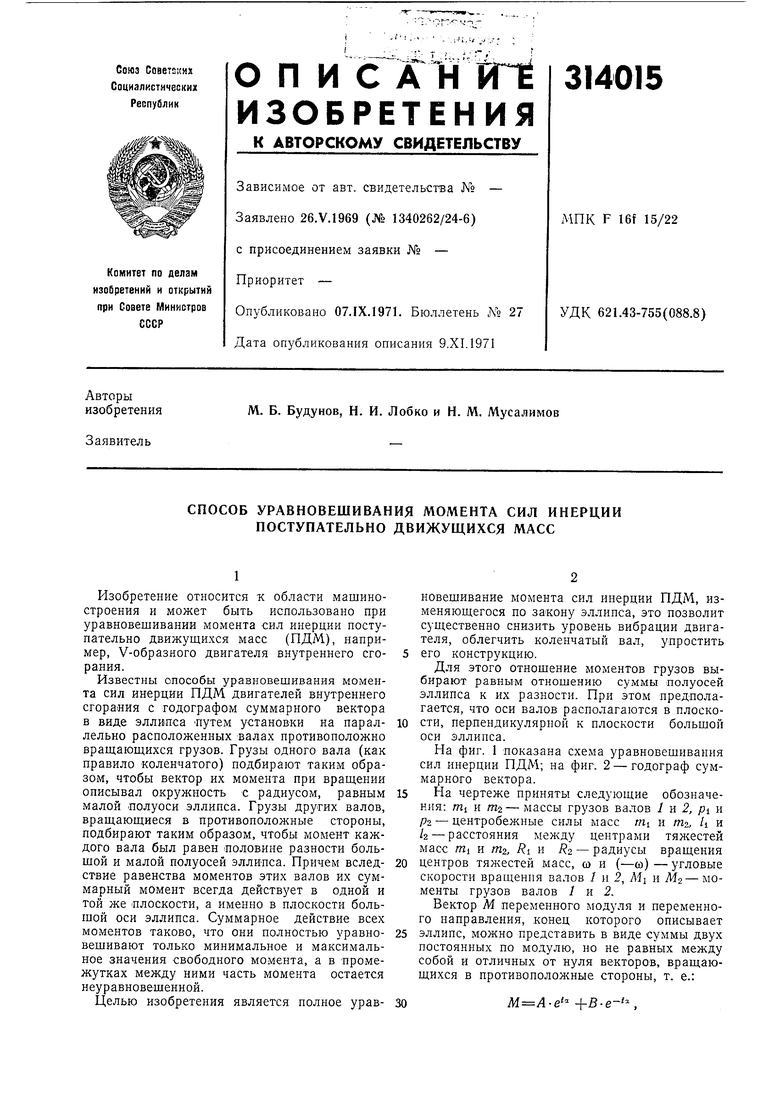
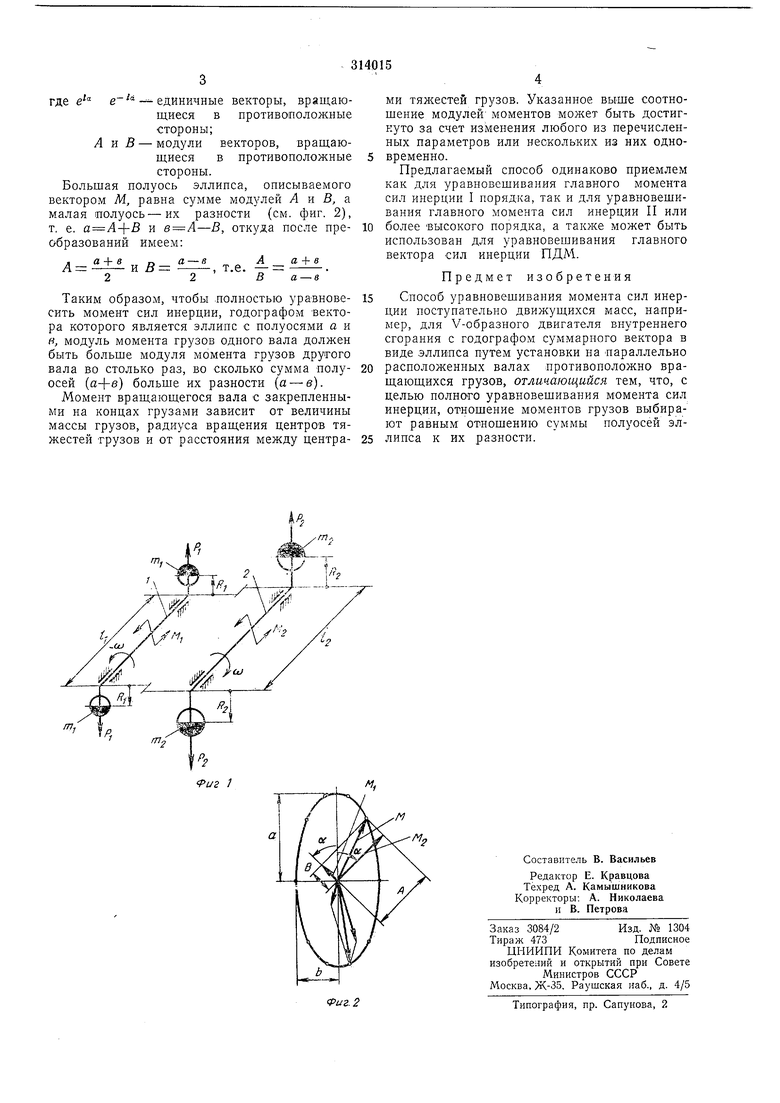
На фиг. 1 показана схема уравновешивания сил инерции ПДМ; на фиг. 2 - годограф суммарного вектора.
На чертеже приняты следующие обозначения: mi Н mz - массы грузов валов 1 и 2, pi и PZ - центробежные силы масс mi и niz, /i и /2 - расстояния между центрами тялсестей масс mi и т2, Ri и R2 - радиусы вращения центров тяжестей масс, о и (-и) - угловые скорости вращения валов / л 2, и Mz- моменты грузов валов 1 и 2.
Вектор М переменного модуля и переменного направления, конец которого описывает эллипс, можно представить в виде суммы двух постоянных по модулю, но не равных между собой и отличных от нуля векторов, вращающихся в противополол ные стороны, т. е.: - единичные векторы, вращающиеся в противоположные стороны; А и В - модули векторов, вращающиеся в противоположные стороны. Большая полуось эллипса, описываемого вектором М, равна сумме модулей А и В, а малая полуось-их разности (см. фиг. 2), т. е. и , откуда после преобразований имеем: А а + в Т.е. - в Таким образом, чтобы .полностью уравновесить момент сил инерции, годографом вектора которого является эллипс с полуосями а и f, модуль момента грузов одного вала должен быть больше модуля момента грузов другого вала во столько раз, во сколько сумма полуосей (a-f-e) больше их разности (а -е). Момент вращающегося вала с закрепленными на концах грузами зависит от величины массы грузов, радиуса вращения центров тяжестей грузов и от расстояния между центрами тянсестей грузов. Указанное выше соотношение модулей моментов может быть достигнуто за счет изменения любого из перечисленных параметров или нескольких из них одновременно. Предлагаемый способ одинаково приемлем как для уравновешивания главного момента сил инерции I порядка, так и для уравновешивания главного момента сил инерции II или более ВЫСОКОГО порядка, а также может быть использован для уравновешивания главного вектора сил инерции ПДМ. Предмет изобретения Способ уравновешивания момента сил инерции поступательно движущихся масс, например, для V-образного двигателя внутреннего сгорания с годографом суммарного вектора в виде эллипса путем установки на параллельно расположенных валах противоположно вращающихся грузов, отличающийся тем, что, с целью полного уравновешивания момента сил инерции, отношение моментов грузов выбирают равным отношению суммы полуосей эллипса к их разности.