Известные устройства для измерения объемной производительности экскаватора с роторно-ковшовым рабочим органом, включающие механический датчик уровня заполнения ковшей, датчик преобразования сигналов в электрические импульсы и блок счетчиков, не обеспечивают непосредственный замер объема породы в каждом ковше.
Предложенное устройство отличается тем, что его механический датчик выполнен в виде поворотного, шарнирно укрепленного и подпружиненного с одной из сторон, устанавливаемого в прорези обечайки ротора-сектора, включенного через датчик преобразования сигналов в электрическую цепь, в которую также включена электрическая модель ковша, осуществляющая квантование объемного заполнения движущегося ковша с последующим суммированием сигналов-импульсов на блоке счетчиков.
Электрическая модель ковша может быть выполнена в виде диска с зубьями, кинематически связанного с валом ротора и снабженного постоянным магнитом.
Такая конструкция предлагаемого устройства обеспечивает замер породы в каждом ковше экскаватора.
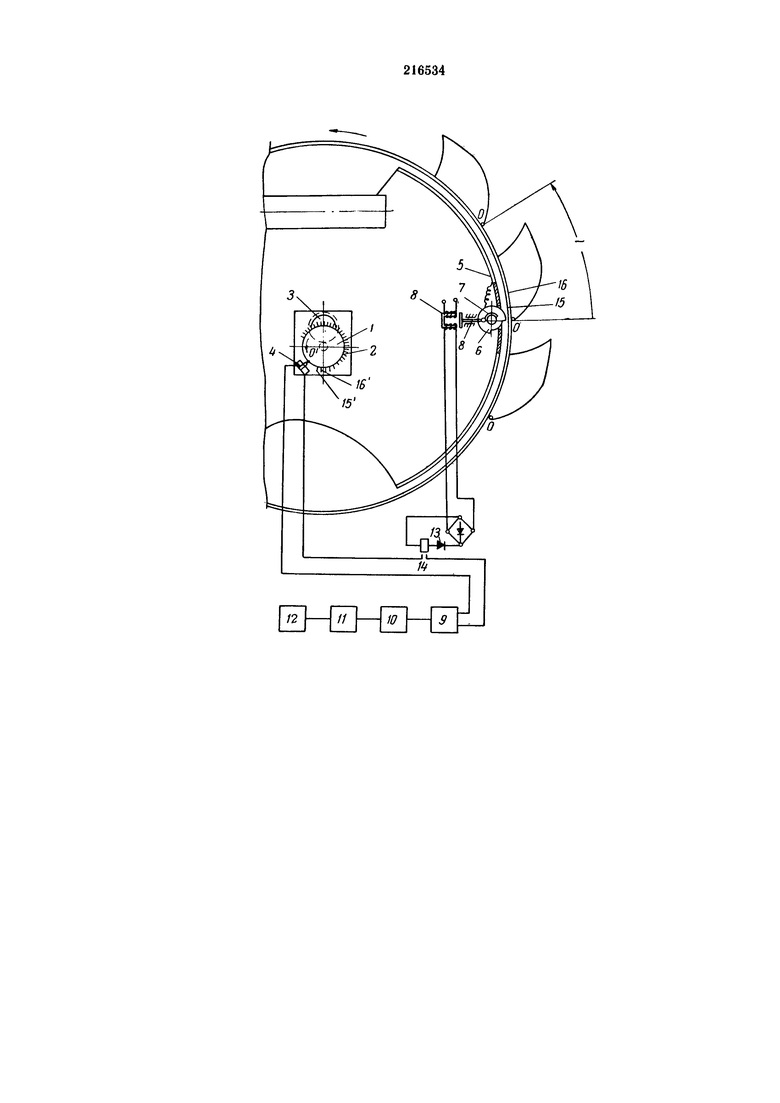
На чертеже схематически показано описываемое устройство.
Устройство для измерения объемной производительности экскаватора с роторно-ковшовым рабочим органом состоит из электрической модели ковша, механического датчика уровня заполнения ковшей, датчика преобразования сигналов в электрические импульсы и блока счетчиков.
Электрическая модель ковша выполнена в виде диска 1 из немагнитного материала, периметр которого эквивалентен длине  одного ковша. По торцу диска 1 расположены зубья 2 из магнитомягкого материала, расстояние между которыми и их последовательность те же, что и у элементарных объемов (объемов, заключенных между всеми участками, на которые разбит ковш по длине). Диск 1 с зубьями 2 через редуктор 3 с передаточным отношением
одного ковша. По торцу диска 1 расположены зубья 2 из магнитомягкого материала, расстояние между которыми и их последовательность те же, что и у элементарных объемов (объемов, заключенных между всеми участками, на которые разбит ковш по длине). Диск 1 с зубьями 2 через редуктор 3 с передаточным отношением  (где n - количество ковшей) кинематически связан с валом ротора. При вращении диска зубья пересекают поле постоянного магнита 4, в обмотке которого, за счет изменения индукции в зоне полюсов, наводится э.д.с. от каждого зуба.
(где n - количество ковшей) кинематически связан с валом ротора. При вращении диска зубья пересекают поле постоянного магнита 4, в обмотке которого, за счет изменения индукции в зоне полюсов, наводится э.д.с. от каждого зуба.
Механический датчик уровня заполнения ковшей выполнен в виде поворотного шарнирно укрепленного и подпружиненного с одной из сторон, устанавливаемого в прорези обечайки 5 ротора-сектора 6, эксцентриковый прилив 7 которого контактирует с датчиком 8 преобразования сигналов. Через датчик 8 преобразования сигналов механический датчик уровня включен в электрическую цепь, в которую также включена электрическая модель ковша.
Блок счетчиков включает усилитель-формирователь 9 импульсов, двоичный счетчик 10 на полупроводниковых триодах, электронный ключ 11 и цифровой счетчик электрических импульсов 12.
Переменное напряжение вторичной обмотки датчика 8 преобразования сигналов выпрямляется на мостике Герца и через встречно включенный кремниевый стабилитрон 13 поступает на обмотку чувствительного реле, нормально открытый контакт 14 которого включен в линию связи, соединяющую обмотку постоянного магнита модели ковша со входом усилителя-формирователя 9.
В основу устройства для измерения объемной производительности экскаватора положено фиксирование наличия породы в реальном ковше, а квантование объемного заполнения реального ковша осуществляется моделью ковша с последующим суммированием электрических импульсов.
Для нормальной работы устройства модель ковша приводят в исходное положение. Для этого конечную точку О одного из ковшей, соответствующую нулевому объему, путем поворота роторного колеса совмещают с рабочим выступом поворотного сектора механического датчика. После этого модель ковша приводят в такое соответствие, при котором диск 1 устанавливается точкой О′, соответствующей нулевому объему на модели ковша, между полюсами постоянного магнита 4. Тогда за  часть оборота роторного колеса диск 1 модели ковша совершит один полный оборот, а точка О следующего ковша совместится с рабочим выступом поворотного сектора 6. Элементарному объему ковша, заключенному между точкой О и горизонтальной плоскостью 15, будет соответствовать электрический импульс тока, возникающий в обмотке постоянного магнита 4 при прохождении между его полюсами зуба 15′, а элементарному объему между горизонтальными плоскостями 15 и 16 соответствует импульс от зуба 16′ и т.д.
часть оборота роторного колеса диск 1 модели ковша совершит один полный оборот, а точка О следующего ковша совместится с рабочим выступом поворотного сектора 6. Элементарному объему ковша, заключенному между точкой О и горизонтальной плоскостью 15, будет соответствовать электрический импульс тока, возникающий в обмотке постоянного магнита 4 при прохождении между его полюсами зуба 15′, а элементарному объему между горизонтальными плоскостями 15 и 16 соответствует импульс от зуба 16′ и т.д.
При работе экскаватора находящийся в ковше грунт до разгрузочного окна скользит по неподвижной обечайке 5. Входя в зацепление с рабочим выступом сектора 6, грунт производит поворот механического датчика уровня заполнения ковшей по ходу. Эксцентриковый прилив 7 отжимает шток датчика преобразования сигналов, в результате чего срабатывает реле, замыкая нормально открытый контакт 14. Электрические импульсы, генерируемые моделью ковша, поступают на вход усилителя-формирователя 9. В таком положении механический датчик будет находиться до тех пор, пока не пройдет весь ковш, наполненный грунтом. Возврат механического датчика в первоначальное положение осуществляется за счет пружины. С подходом следующего ковша с грунтом к механическому датчику цикл повторяется. С усилителя-формирователя 9 импульсы прямоугольной формы поступают на вход двоичного счетчика 10, состоящего из семи последовательно соединенных триггеров, выполняющих функции делителей частоты и элементов памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧИЙ ОРГАН ЭКСКАВАТОРА | 1971 |
|
SU428063A1 |
| Рабочий орган с центробежной разгрузкой несвязного грунта для роторного экскаватора | 1964 |
|
SU195980A1 |
| Роторный экскаватор для рытья траншей | 1959 |
|
SU131273A1 |
| Рабочий орган роторного траншейного экскаватора | 1987 |
|
SU1476071A1 |
| РАБОЧИЙ ОРГАН КАРЬЕРНОГО ЭКСКАВАТОРА | 2007 |
|
RU2344239C1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Рабочее оборудование роторного экскаватора с центробежной разгрузкой | 1989 |
|
SU1684428A1 |
| Устройство для определения глубины копания одноковшовым экскаватором | 1983 |
|
SU1139965A1 |
| Рабочий орган роторного экскаватора | 1986 |
|
SU1374054A1 |
| Устройство для учета и контроля работы экскаватора | 1979 |
|
SU872668A1 |
1. Устройство для измерения объемной производительности экскаватора с роторно-ковшовым рабочим органом, включающее механический датчик уровня заполнения ковшей, датчик преобразования сигналов в электрические импульсы и блок счетчиков, отличающееся тем, что, с целью непосредственного замера объема породы в каждом ковше, механический датчик выполнен в виде поворотного, шарнирно укрепленного и подпружиненного с одной из сторон, устанавливаемого в прорези обечайки ротора-сектора, включенного через датчик преобразования сигналов в электрическую цепь, в которую также включена электрическая модель ковша, осуществляющая квантование объемного заполнения движущегося ковша с последующим суммированием сигналов-импульсов на блоке счетчиков.
2. Устройство по п. 1, отличающееся тем, что электрическая модель ковша выполнена в виде диска с зубьями, кинематически связанного с валом ротора и снабженного постоянным магнитом.
