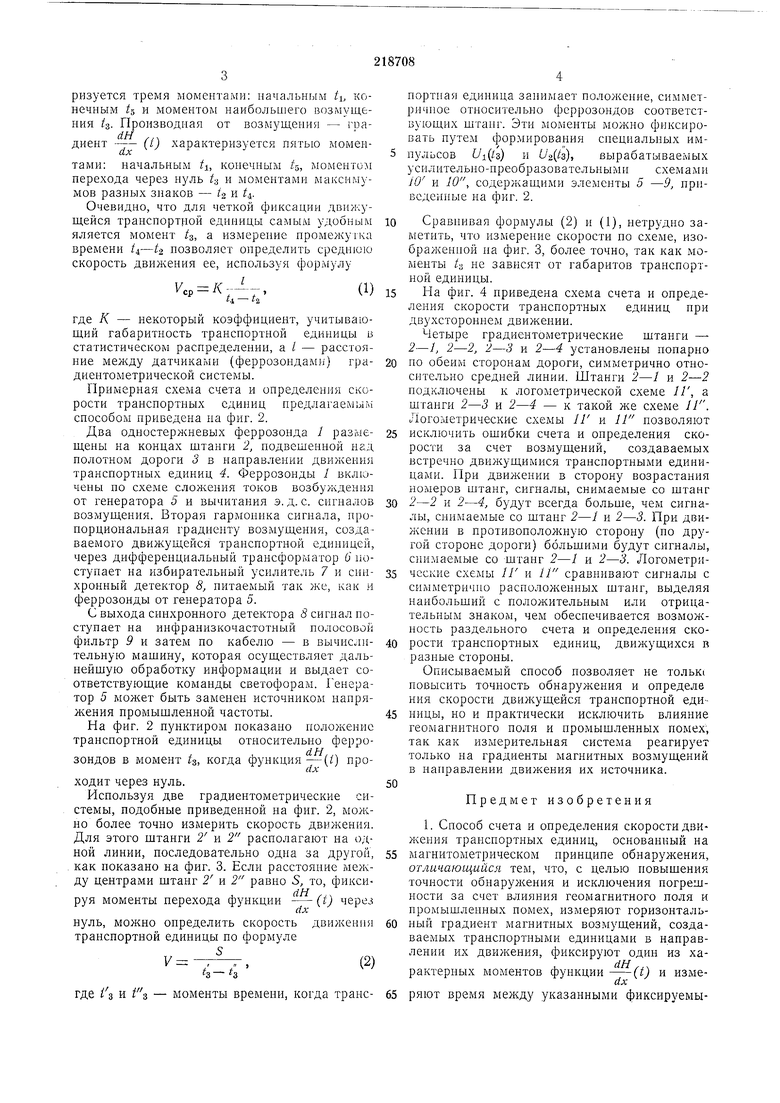
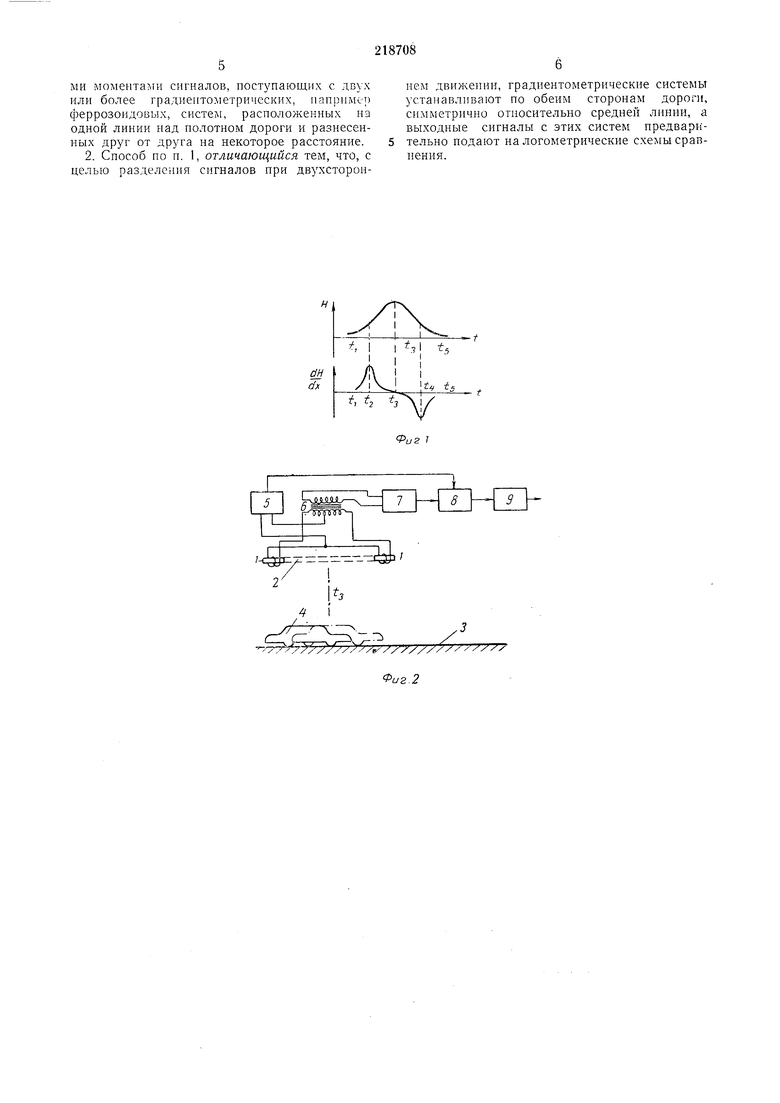
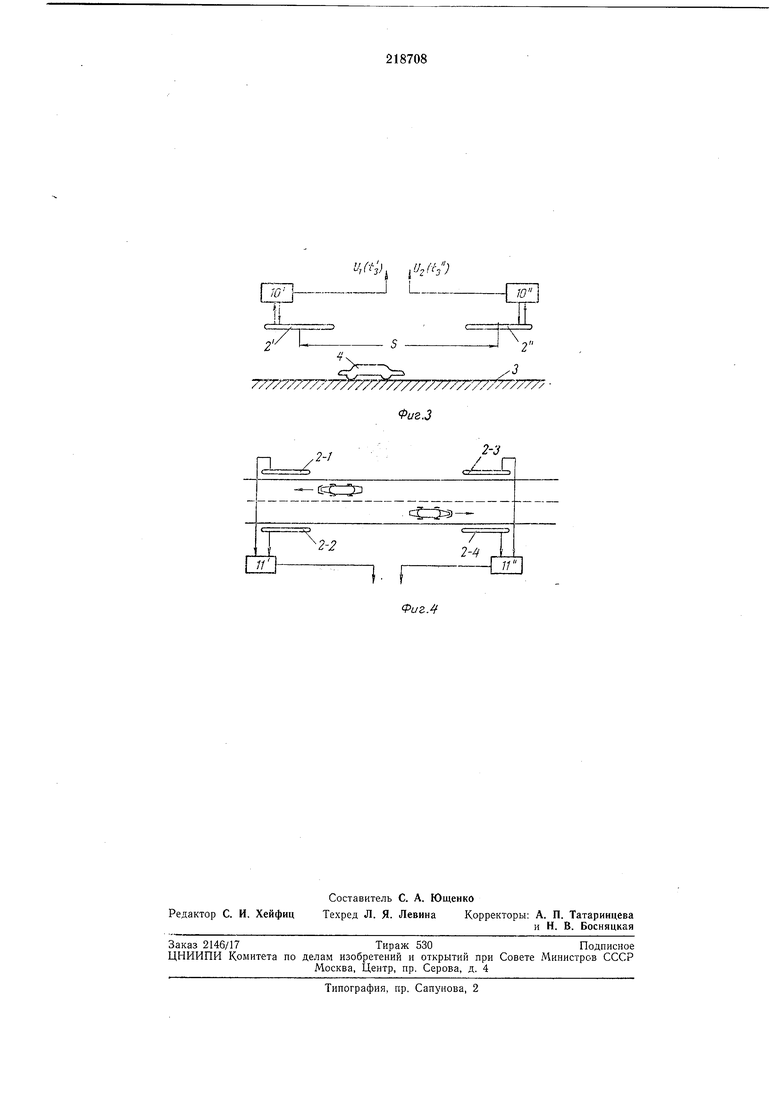
Предлагаемый способ относится к области автоматического регулирования уличного движения транспорта. Известные способы счета и определения скорости движения наземного транспорта, основанные на магнитометрическом принципе индикации движущихся транспортных единиц (ТЕ) с последующей обработкой ииформации в электронных вычислительных машинах, выдающих соответствующие команды светофорам, установленным на перекрестках сильно загруженных магистралей, обладают невысокой разрешающей способностью, чувствительны к влиянию геомагнитного поля и промышленных помех, что приводит к существенным погрешностям, а осуществление их затруднительно, так как требует вскрытия полотна дороги для укладки индуктивных петель или рамок. С целью повышения точности обнаружения и исключения погрешности за счет влияния геомагнитного поля и промышленных помех, по предлагаемому способу для фиксации транспортных единиц измеряют посредством градиентометрических, например феррозондовых, систем горизонтальный градиент магнитdH , J ных возмущении (г) , создаваемых трапежения, причем фиксируют один из характерных моментов функции (t), например моалмент перехода этой функции через нуль, а для определения скорости движения измеряют время мелчду фиксируемыми моментами сигналов, поступающих с двух или более градиентометрических систем, расположенных на одной линии над полотном дороги и разнесенных друг от друга на некоторое расстояние. Кроме того, предложенный способ позволяет разделять сигналы при двухстороннем движении благодаря тому, что градиентометрические системы устанавливают по обеим сторонам дороги, симметрично относителы-ю средней линии, а выходные сигналы с этих систем предварительно подают на логометрические схемы сравнения. На фиг. 1 представлено изменение магнитного возмущения и горизонтального градиента при прохолсдении транспортной единицы; на фиг. 2 - схема устройства счета и определения скорости транспортных единиц с одной парой феррозондов при одностороннем движении; на фиг. 3 - то же, с двумя парами феррозондов; на фиг. 4 - то же, с четырьмя парами феррозондов, при двухстороннем дни жении. ризуется тремя моментами: начальным ti, конечным /5 и моментом наибольшего возмущения 3- Производная от возмущения - градиент(i) характеризуетея пятью моментами: начальным /i, конечным 4, моментом перехода через нуль /« и моментами максимумов разных знаков - /а и г.. Очевидно, что для четкой фиксации движущейся транспортной еднницы самым удобным яляетея момент /з, а измерение нромежугка времени /4-/2 позволяет определить среднюю скорость движения ее, используя формулу .(1) где К, - некоторый коэффициент, учитывающий габаритность транспортной единицы в статистическом распределении, а / - расстояние между датчиками (феррозондами) градиентометрической системы. Примерная схема счета и определения скорости транспортных единиц предлагаемым способом приведена на фиг. 2. Два одностержневых феррозонда / размещены на концах штанги 2, подвешенной над полотном дороги 5 в направлении движения транспортных единиц 4. Феррозонды / включены по схеме сложения токов возбуждения от генератора 5 и вычитания э. д. с. сигналов возмущения. Вторая гармоника сигнала, нропорциональная градиенту возмущения, создаваемого движущейся транспортной едииицей, через дифференциальный транеформатор ипоступает на избирательный усилитель 7 и синхронный детектор 8, питаемый так же, как и феррозонды от генератора 5. С выхода синхронного детектора 5 сигнал поступает на инфранизкочастотный полосовой фильтр 9 и затем по кабелю - в вычислительную мащину, которая осуществляет дальнейщую обработку информации и выдает еоответствующие команды светофорам. Генератор 5 быть заменен источником наирялсения промыщленной частоты. На фиг. 2 пунктиром показано положение транспортной единицы относительно ферроJ1dH. ., ЗОНДОВ в момент ts, когда функция-(i) проходит через нуль. Используя две градиентометрические системы, подобные приведенной на фиг. 2, можно более точно измерить скорость движения. Для этого щтанги 2 и 2 располагают на одной линии, последовательно одна за другой, . как показано на фиг. 3. Если расстояние между центрами штанг 2 и 2 равно S, то, фнкси, dH .,, руя моменты перехода функции (t) через нуль, можно определить скорость движения транспортной единицы по формуле портная единица занимает положеиие, симметричное относительно феррозондов соответствующих штанг. Эти моменты можно фиксировать путем формирования специальных импульсов Ui(iz) и Uz(tz), вырабатываемых усилительно-преобразовательными схемами W и 10, содержащими элементы 5 -9, приведенные на фиг. 2. Сравнивая формулы (2) и (1), нетрудно заметить, что измерение скорости по схеме, изображенной на фиг. 3, более точно, так как моменты t« не зависят от габаритов транспортной единицы. Па фиг. 4 приведена схема счета и определения скорости транспортных единиц при двухстороннем движении. Четыре градиентометрические штанги - 2-/, 2-2, 2-3 и 2-4 установлены попарно по обеим сторонам дороги, симметрично относительно средней линии. Штанги 2-/ и 2-2 подключены к логометрической схеме 1Г, а щтанги 2-3 и 2-4 - к такой же схеме И . Логометрические схемы 11 и 11 позволяют исключить ошибки счета и определения скорости за счет возмущений, создаваемых встречно движущимиея транснортиыми единицами. При движении в сторону возрастания номеров штанг, сигналы, снимаемые со штанг 2-2 и 2-4, будут всегда больше, чем сигиалы, снимаемые со штанг 2-/ и 2-3. При движении в противоположную сторону (по другой стороне дороги) большими будут сигналы, снимаемые со штанг 2-/ и 2-3. Логометрические схемы 1Г и // сравнивают сигналы с симметрично расположенных штанг, выделяя наибольший с нолож:ительным или отрицательным знаком, чем обеспечивается возможность раздельного счета и определения скорости транспортных единиц, движущихся в разные етороны. Описываемый способ позволяет не тольк повысить точность обнаружения и определе ния скорости движущейся транспортной единицы, но и практически исключить влияние геомагнитного поля и промыщленных помех, так как измерительная система реагирует только на градиенты магнитных возмущений в направлении движения их источника. Предмет изобретения 1. Способ счета и определения екорости движения транспортных единиц, основанный на магнитометрическом иринципе обнаружения, отличающийся тем, что, с целью повышения точности обнаружения и исключения погрешности за счет влияния геомагнитного поля и промышлепных помех, измеряют горизонтальный градиент магнитных возмущений, создаваемых транспортными единицами в направлении нх движения, фиксируют один из хами моментами сигналов, поступающих с двух или более градиеитометрических, иапримет) феррозоидовых, систем, расположенных иа одиой линии иад полотном дороги и разнесенных друг от друга па некоторое расстояние.
2. Способ по п. 1, отличающийся тем, что, с целью разделения сигналов при двухстороннем движе 1ии, градиентометрическпе системы устанавливают по обеим сторонам дороги, симметрично относительно средней линии, а выходные сигналы с этих систем предварительно подают на логометрические схемы сравнения.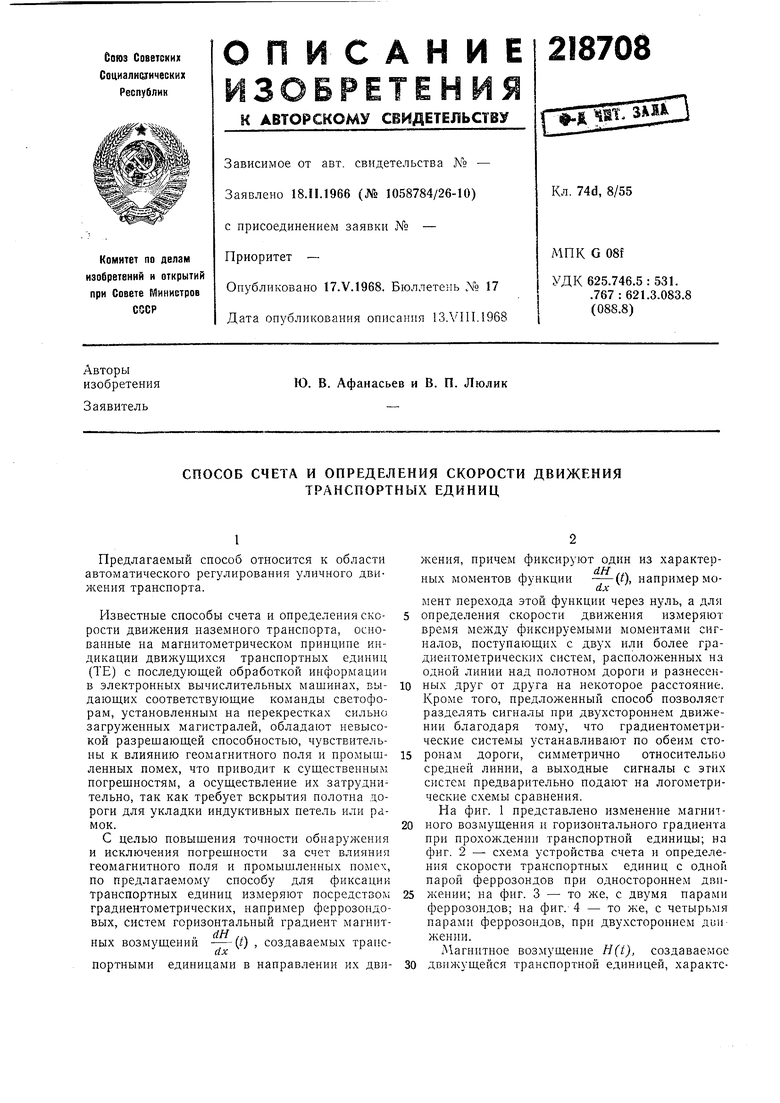
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2007 |
|
RU2331090C1 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2446479C1 |
| Градиентометрический способ магнитной съемки и устройство для его осуществления | 2018 |
|
RU2686855C1 |
| ППЕНТЙО-ТЕХЙ-:^: =БИбЛИОТьКД | 1970 |
|
SU280445A1 |
| МАГНИТОМЕТРИЧЕСКИЙ ДАТЧИК | 2002 |
|
RU2235200C2 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОЙ МАГНИТНОЙ АНОМАЛИИ | 2007 |
|
RU2411550C2 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ЗАТОПЛЕННЫХ И ЗАИЛЕННЫХ ОБЪЕКТОВ НА МОРСКОМ ДНЕ | 2006 |
|
RU2319178C2 |
W
If .5
V
У,Аз )
cCi53)
