Изобретение относится к технике магнитных измерений и предназначено для проведения морской магнитной съемки с борта судна-буксировщика гондол и изучения аномальной части геомагнитного поля в условиях помех от геомагнитных вариаций, волнения моря, качки носителя, постоянных и переменных магнитных полей, создаваемых самим носителем, особенно в тех случаях, когда величина помех превышает измеряемый сигнал.
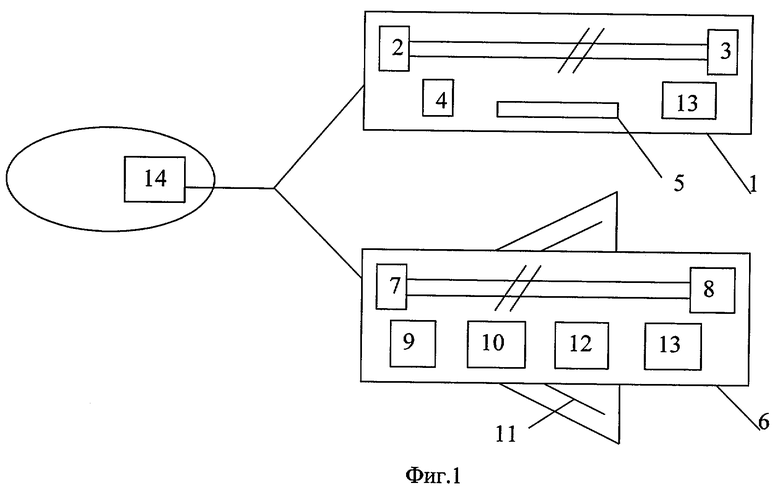
Известно устройство (см. фиг.1), которое состоит из двух буксируемых гондол; в первой гондоле (1) размещены два трехкомпонентных магнитометрических датчика (2, 3), разнесенных на жесткой базе, электронный блок, состоящий из усилительно-преобразовательного блока и АЦП (4), и немагнитный отражатель (5), во второй гондоле (6) размещены два магнитометрических датчика (7, 8), электронный блок, состоящий из усилительно-преобразовательного блока и АЦП (9), гидролокатор (10), по данным которого строится изображение дна, антенны гидролокатора (11) и эхолот (12), который контролирует базу разноса между гондолами и расстояние до дна моря. В каждой гондоле установлены устройства управления движением гондол, поддержанием постоянного расстояния между гондолами и положения относительно дна моря (13). Устройство соединено с судном-буксировщиком кабель-тросом, по которому информация от гидролокатора, эхолота и двух магнитных градиентометрических систем поступает на ПЭВМ (14) для обработки и представления в виде изображения, включающего в себя отображение положения объекта поиска на дне и магнитные характеристики этого объекта. Совмещение этих изображений позволяет повысить точность определения местонахождения и характеристик объекта поиска, в том числе для заглубленных в донный грунт объектов, а также определять физические характеристики донного рельефа по трассе съемки.
Цель изобретения - повышение точности и достоверности обнаружения и идентификации затопленных и заиленных объектов, а также отслеживание трасс и состояния трубопроводов и электрокабелей на дне моря.
Для достижения этой цели в известное устройство («Устройство для определения геомагнитного поля на подвижном носителе», авторское свидетельство №1666991, 1 апреля 1991 г.) вводятся дополнительно гидролокатор и эхолот.
Блок-схема данного устройства представлена на фиг.2.
Устройство (фиг.2) содержит измеритель компонент геомагнитного поля, включающий в себя магниточувствительные преобразователи 1-3, n (МЧП), измерительные блоки 4-6, n, аналого-цифровые преобразователи (АЦП) 7-9, n, при этом выходы АЦП соединены с входом блока 10 формирования компонент тензора. К другому входу блока 10 подсоединен через общую шину выход блока 11 девиационных поправок, связанный с измерителем 12 девиации носителя. Выходы блока 10 соединены с входами блока 13 интегральных значений компонент тензора и блока 14 корреляционной обработки компонент тензора. При этом с другим входом блока 14 соединен выход блока 15 навигационных поправок, связанный с интегральной навигационной системой 16. Выходы блоков 10, 13 и 14 через общую шину, к которой подключен таймер 17, соединены с входом сумматора 18. С другим входом сумматора соединен выход блока 19 относительных линейно-угловых поправок, связанный с измерителем 20 относительных линейно-угловых перемещений датчиков. Выход сумматора 18, гидролокатора 21 и эхолота 22 соединен с блоком 23 (электронной вычислительной машиной (ЭВМ)) построения совместного отображения информации от магниточувствительных преобразователей 1-3, n, гидролокатора и эхолота.
Совместная обработка данных измерителей компонент геомагнитного поля, гидролокатора и эхолота осуществляется по алгоритмам, изложенным в следующих источниках [2, 3, 4].
Устройство работает следующим образом.
Установленные на подвижном носителе в двух буксируемых гондолах пространственно разнесенные по трем координатным осям трехкомпонентные магниточувствительные преобразователи 1-3, n измеряют геомагнитное поле по каждой компоненте в месте установки каждого датчика и преобразуют его значение в электрический сигнал, пропорциональный измеряемому полю. Сигнал поступает в измерительные блоки магнитометра 4-6, n и после усиления и фильтрации в них - на аналого-цифровые преобразователи (АЦП) 7-9, n, которые представляют этот сигнал в цифровой форме, для предварительной обработки сигнала. С выходов АЦП сигналы от обеих групп трехкомпонентных преобразователей по каждой компоненте х, у, z подаются на блок 10 формирования компонент тензора, производящий попарное вычитание значений поля по каждой компоненте, формируя тензор, состоящий из значений девяти градиентов геомагнитного поля по трем осям:
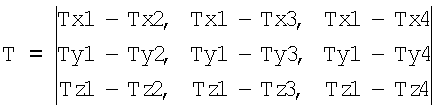
На другой вход блока 10 формирования компонент тензора подаются сигналы девиационных поправок от блока 11 девиационных поправок, связанного с измерителем 12 девиации носителя.
В общем виде связь компонент тензора геомагнитного поля на подвижном носителе в объемно-разнесенных датчиках может быть представлена в виде

 - вектор геомагнитного поля в точке k;
- вектор геомагнитного поля в точке k;
 - вектор геомагнитного поля в точке начального отсчета;
- вектор геомагнитного поля в точке начального отсчета;
 - вектор девиации носителя;
- вектор девиации носителя;
 - вектор направления магнитной оси датчика.
- вектор направления магнитной оси датчика.
Измеритель 20 относительных линейно-угловых перемещений датчиков измеряет размеры баз между датчиками и угловые направления магнитных осей каждого датчика. Блок 19 относительных линейно-угловых поправок пересчитывает поправки на линейно-угловые перемещения датчиков в значения поля по каждой компоненте в месте измерения, после чего они поступают на вход сумматора 18. В сумматоре эти линейно-угловые поправки алгебраически суммируются (в зависимости от режима работы устройства) либо с измеренными значениями компонент тензора геомагнитного поля (с внесенными поправками на девиацию) (блок 10), либо с результатами корреляционной обработки компонент тензора (с навигационными поправками) (блок 14).
Режим работы предлагаемого устройства определяется условиями эксплуатации, т.е. уровнем помех, создаваемым волнением моря и переменными магнитными полями, обусловленными этим волнением, а именно, в случае спокойного моря и отсутствия помех, на вход сумматора поступают сигналы с выхода блока 10, в случае малого волнения и линейных помех - с выхода блока 13, а в случае сильного волнения и появления нелинейных помех - с выхода блока 14.
Литература
1. Авторское свидетельство №1666991 «Устройство для определения геомагнитного поля на подвижном носителе». Автор: Скрынников Р.Г. и другие, 1 апреля 1991 г.
2. Скрынников Р.Г., Иванов В.А., Иманкулов М.Д. «Методы и аппаратура поиска затопленных химических снарядов по электромагнитному полю». I-я Международная конференция "Приборостроение в безопасности и экологии человека" (IEHS'96), Санкт-Петербург, 30 октября - 2 ноября 1996 г.
3. Скрынников Р.Г., Иванов В.А., Иманкулов М.Д. «Определение параметров траектории движущегося намагниченного тела». IV-я Научная конференция Кыргызско-Российского (Славянского) университета, Бишкек, 15-16 мая 1997 г.
4. Скрынников Р.Г., Иванов В.А., Иманкулов М.Д., Нерсесов Б.А., Чулков В.Л. «Определение местоположения намагниченного тела». Международный конгресс "Слабые и сверхслабые поля и излучения в биологии и медицине", Санкт-Петербург, 17-19 июня 1997 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения геомагнитного поля на подвижном носителе | 1989 |
|
SU1666991A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2015 |
|
RU2615050C2 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
Изобретение относится к магнитным локационным системам и предназначено для поиска затопленных и заиленных объектов на дне и вблизи дна. Технический результат: повышение надежности обнаружения объектов, увеличения дистанции поиска и точности определения местоположения объектов, повышение производительности и снижения трудоемкости поисковых работ. Сущность: в устройство входят два независимых устройства для обнаружения объекта - гидролокационное и электромагнитное. Данные от этих устройств обрабатывают на ЭВМ и определяют местоположение, размеры и магнитные характеристики заиленных и затопленных объектов, а также трассы трубопроводов и электрокабелей на дне моря и магнитное состояние объектов. Результаты представляются на одном картографическом планшете с привязкой к координатам по навигационной системе. 2 ил.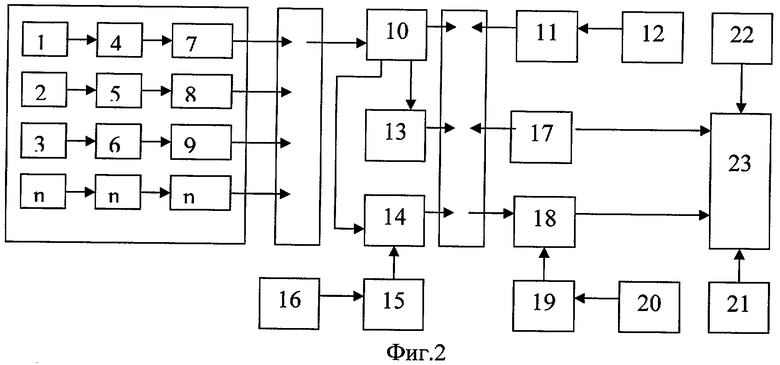
Устройство для поиска затопленных и заиленных объектов на морском дне, расположенное на подвижном носителе, содержащее измеритель компонент геомагнитного поля, состоящий из последовательно соединенных магниточувствительных преобразователей, измерительных блоков и аналого-цифровых преобразователей по каждому каналу и последовательно соединенных сумматоров, а также последовательно соединенных блоков формирования компонент тензора геомагнитного поля, блок интегральных значений компонент тензора, последовательно соединенные измеритель девиации носителя и блок девиационных поправок, последовательно соединенные интегральная навигационная система и блок навигационных поправок, последовательно соединенные измеритель линейно-угловых перемещений датчиков и блок относительных линейно-угловых поправок, а также таймер, при этом один из входов блока формирования компонент тензора соединен с выходами аналого-цифровых преобразователей, другой вход с выходом блока девиационных поправок, второй выход блока формирования компонент тензора соединен через блок интегральных значений компонент тензора с таймером, второй вход блока корреляционной обработки компонент тензора подключен к сумматору, а третий вход к выходу блока навигационных поправок, а выход блока относительных линейно-угловых поправок соединен со вторым входом сумматора, отличающееся тем, что в устройство вводятся дополнительно блок гидролокатора, блок эхолота и электронно-вычислительная машина (ЭВМ), при этом совместная обработка данных измерителей компонент геомагнитного поля, гидролокатора и эхолота определяет местоположение, размеры и магнитные характеристики заиленных и затопленных объектов, а также трассы трубопроводов и электрокабелей на дне моря и магнитное состояние объектов поиска и выполняется на ЭВМ.
| Устройство для определения геомагнитного поля на подвижном носителе | 1989 |
|
SU1666991A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГРАДИЕНТА МАГНИТНОГО ПОЛЯ | 0 |
|
SU232533A1 |
| RU 96120591 A, 10.01.1999 | |||
| ФЕРРОЗОНДОВЫЙ АЭРОМАГНИТОМЕТР | 1991 |
|
RU2019860C1 |
| СПОСОБ ОБНАРУЖЕНИЯ АВАРИЙНОГО ПОДВОДНОГО ОБЪЕКТА, ЛЕЖАЩЕГО НА ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2233230C2 |

