Известны способы определения динамических свойств системы автоматического управления с помощью эталонной модели.
Предложенный способ отличается от известных тем, что выявляют скрытые периодичности в выходном сигнале и сигнале с опорной модели, сравнивают параметры скрытых периодичностей, выявляют разность между числом гармонических составляющих в обоих сигналах и между амплитудами и фазами соответствующих составляющих и изменяют параметры системы, добиваясь идентичных скрытых периодичностей в текущем сигнале и сигнале с модели. Это позволяет повысить точность, ускорить и упростить процесс формирования управляющих воздействий лри самонастройке.
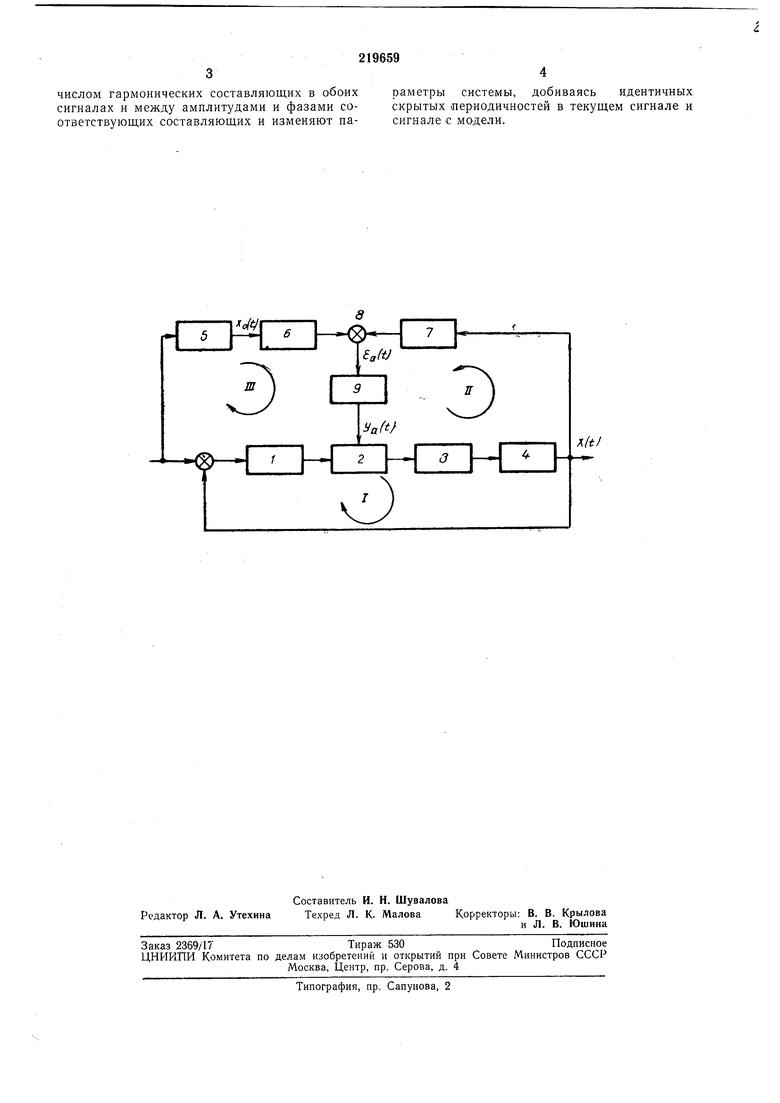
Блок-схема, поясняющая предлагаемый способ, приведена на чертеже.
Блоки /-4 образуют замкнутую систему автоматического управления (САУ), работающую устойчиво и в режиме, близком к оптимальному при отсутствии сигнала у (f)- Блок 2 нелинейный и его динамические свойства изменяются в щироких пределах сигналом самонастройки у а (О- Необходимый выход Х(, (t) системы вырабатывается опорной моделью 5. Блоки 6 н 7 осуществляют выявление скрытых периодичностей с текущего X (t) н необходимого XQ (t) выходов системы. Сравнивающее устройство 8 определяет разницу между гармониками текущего и оптимального состояний 8а (t), а в блоке 9 вырабатывается управляющее .воздействие (сигнал самонастройки у а (О изменяющее динамические свойства блока 2 таким образом, чтобы подавить гармоники, характеризующие ошибки системы. В качестве примеров аналитических (вычислительных) систем автоматического управления, реализующих предлагаемый способ, можно привести системы автоматического управления сложными технологическими процесса ми и системы регулирования нейтронного
уровня атомного реактора.
Предмет изобретения
Способ самонасгройки системы автоматического управления, основанный на измерении и сравнении характеристик текущего выходного сигнала и сигнала с опорной модели, отличающийся те.м, что, с целью повышения точности, ускорения и упрощения процесса формирования управляющих воздействий при самонастройке, выявляют скрытые периодичности в выходном сигнале и сигнале с опорной модели, сравнивают параметры скрытых 34
числом гармонических составляющих в обоих раметры системы, добиваясь идентичных сигналах и между амплитудами и фазами со- скрытых периодичностей в текущем сигнале и отвегствующих составляющих и изменяют па- сигнале с модели.
219659 
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |
| УСТРОЙСТВО для КОНТРОЛЯ и НАСТРОЙКИ ТЕКУЩИХ ХАРАКТЕРИСТИК ОБЪЕКТА УПРАВЛЕНИЯ | 1966 |
|
SU188544A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| СПОСОБ АНАЛИЗА МНОГОЧАСТОТНЫХ СИГНАЛОВ, СОДЕРЖАЩИХ СКРЫТЫЕ ПЕРИОДИЧНОСТИ | 2009 |
|
RU2399060C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И ПОДАВЛЕНИЯ ФИЗИЧЕСКИХ ПРОЦЕССОВ (ПОЛЕЙ) ОКРУЖАЮЩЕЙ СРЕДЫ САМОНАСТРАИВАЮЩИМСЯ ОПОРНЫМ ПРОЦЕССОМ (ПОЛЕМ) | 2008 |
|
RU2391678C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ОПОРНОГО СИГНАЛА ВЫЧИСЛИТЕЛЬНЫМИ СРЕДСТВАМИ В СИСТЕМАХ ЧАСТОТНОЙ И ФАЗОВОЙ СИНХРОНИЗАЦИИ ШИРОКОПОЛОСНЫХ СИСТЕМ СВЯЗИ | 2013 |
|
RU2535198C1 |
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
J((tl
