Известен привод подачи металлорежущего станка -с регулируемой величиной подачи. Однако привод такого типа имеет сложную кинематическую цепь.
Предложенный привод отличается тем, что выполнен в виде гибкой зубчатой |рейки, входящей в зацепление с жесткой зубчатой рейкой благодаря деформации, вызьрваемой линейными статорами, поворотными относительно оси перемещения рейки.
Такое 07личие позволяет упростить конструкцию привода за счет устранения преобразования вращательного движения в поступательное и расширить диапазон регулирования подачи.
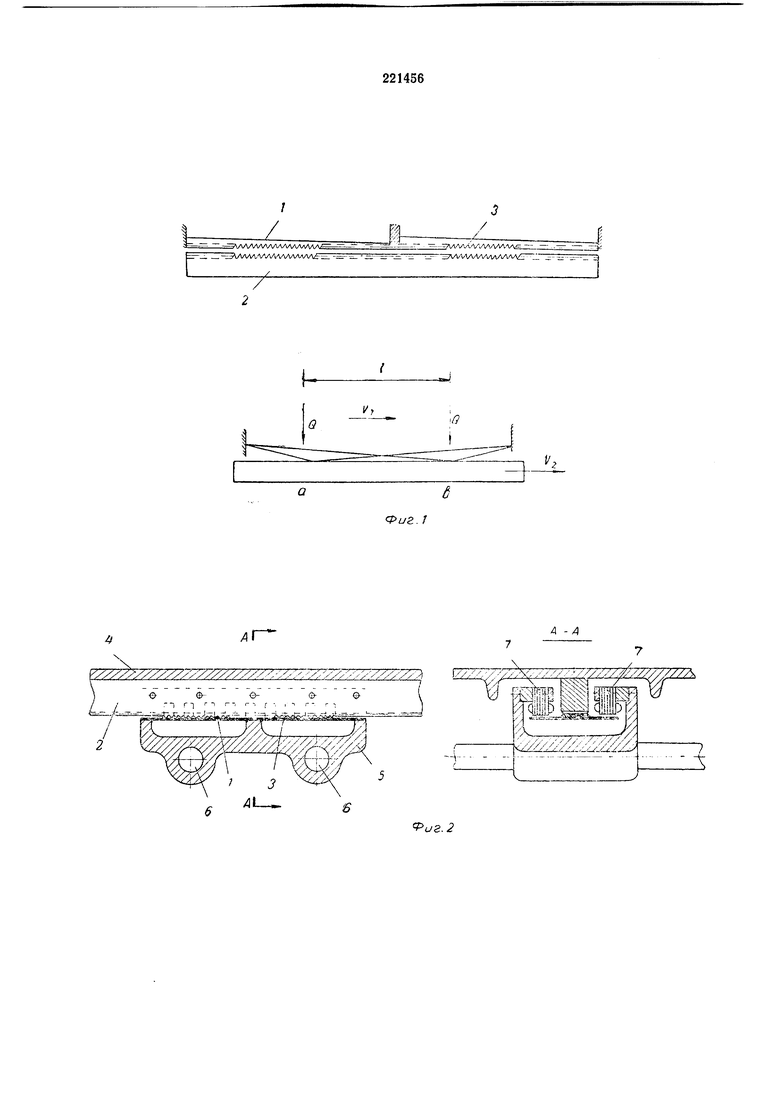
На фиг. 1 приведена схема предложенного привода; на фиг. 2 - конструктивная схема; на фиг. 3-регулируемый вариант привода.
Привод состоит из гибкой рейки /, закрепленной .по концам, и жесткой зубчатой рейки 2. Зубья обеих реек одинаковы, следовательно, оба эти элемента -привода могут находиться в зацеплении. Плоскость гибкой рейки I/ .наклонена к плоскости жесткой рейки под некоторым небольшим углом.
Если какой-либо сосредоточенной силой Q деформировать гибкую рейку в начальном положении а, то ее зубья на этом участке своими вершинами войдут в зацепление с жесткой рейкой. Если точка приложения силы будет перемещаться с некоторой скоростью У, то и точка зацепления гибкой рейки с жесткой также будет -перемещаться и через некоторое время окажется в положеНИИ в. При этом зубья гибкой рейки вследствие ее наклона будут постепенно внедряться менаду зубьями жесткой рейки и перемещать ее с меньшей скоростью V-. Очевидно, что максимальное перемещение
жесткой рейки равно половине шага, и для церемещения на следующие полшага привод должен быть снабжен еще одной гибкой рейкой 3, зубья которой смещены относительно зубьев первой гибкой рейки на половину шага. Таким образом, общее пере.мещение жесткой рейки равно одному шагу за один проход деформирующей силы вдоль реек.
Деформация гибкой рейки осуществляется бегущим магнитным полем. Для этой цели
рядом с рейкой размещается линейная магнитная система, состоящая из нескольких катушек, питаемых токами, смещенными по фазе.
В результате этого максимум магнитной индукции в зазоре перемещается вдоль зазора, что и вызывает перемещение точки макси мальной деформации гибкой рейки. Подобный привод обладает значительной
тока точка зацепления переместится на расстояние / СО скоростью
F,
За это же время рейка передвинется на один шаг t и ее скорость
1/.
Vi /
Отношение скоростей - -у легко может
достигнуть значения 100-150 и более.
Тнким образом, связывая жесткую рейку с подвижным узлом станка, а гибкую рейку с неподвижной станиной, и деформируя последнюю бегуш.им магнитным полем, можно обеспечить перемешение -подвижного узла, минуя промежуточные детали (зубчатые колеса или другие передачи, подшипники, валы и пр.), и исключая преобразование в:раш,ательного движения в поступательное.
Для реверсирования привода достаточно изменить очередность (работы гибких реек 1 и 3. При этом зубья гибких реек будут взаимодействовать с другими сторонами зубьев жесткой рейки и изменять направление ее перемеш,ения. Подобное изменение очередности работы легко достигается электрическими способами путем переключения катушек, создаюш,их бегущее магнитное поле.
Конструктивно привод состоит из жесткой призматической рейки 2, связанной со столом 4 станка. Снизу жесткой рейки расположены две гибкие рейки 1 и 3, укрепленные в картере 5. Картер крепится к станине станка при помощи двух скалок 6. По краям жесткой рейки расположены два линейных статора 7, создающие бегущее магнитное поле. Нижняя рабочая поверхность статора, снабженная пазами для размещения обмоток, имеет форму клина. При возбуждении статоров боковые части гибких реек 1 и 3, лищенные зубьев, притягиваются к ним и вводят зубья, нарезанные на центральной части этих реек, IB зацепление с жесткой рейкой 2. Клиновая поверхность статора обеспечивает постепенное перемещение зубьев в вертикальном направлении.
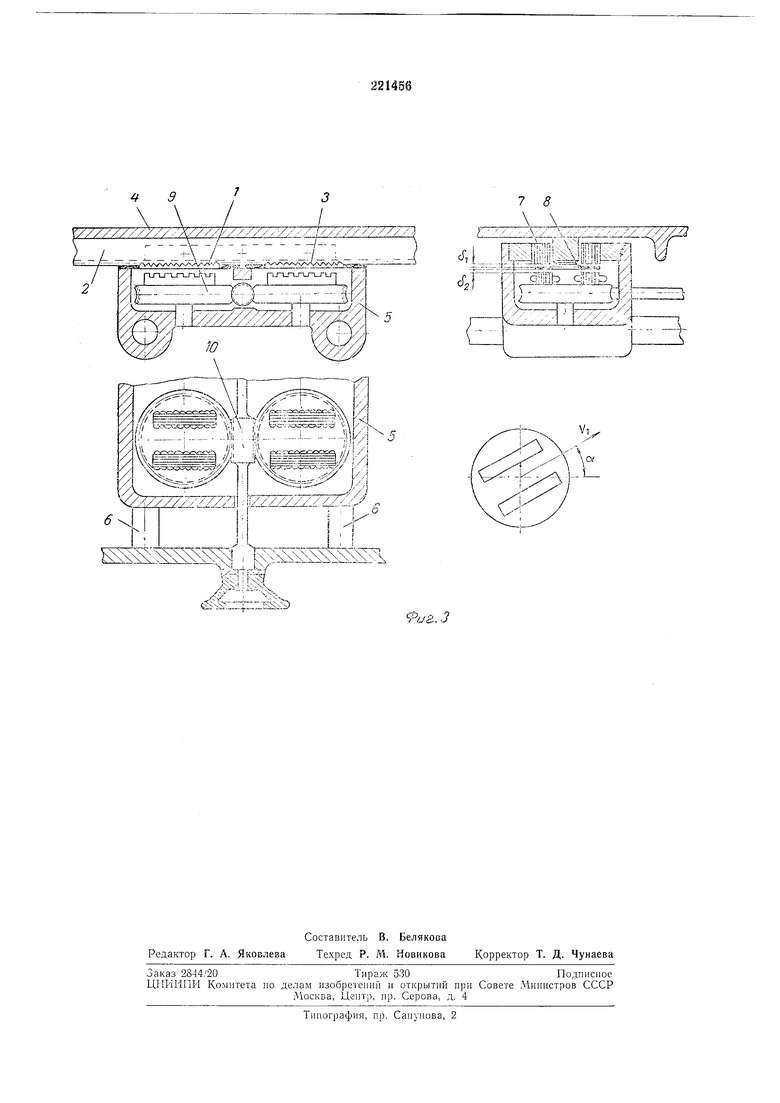
В случае регулируемого варианта привода сердечники статоров 7 лишены обмоток и служат только для замыкания магнитного потока. Для создания же бегущего магнитного
поля используются дополнительные статоры 8, расположенные под гибкими рейками. Сердечники статоров выполнены из листовой электротехнической стали и сна бжены пазами, в которые уложены обмотки.
Зазор ба между статором 8 и гибкой рейкой превышает максимальный зазор 6i между этой рейкой и сердечником 7. Это необходимо для того, чтобы при работе привода гибкая рейка не притягивалась к дополнительному
статору 5 и не выходила из зацепления с жесткой рейкой.
Дополнительные статоры 8 могут поворачиваться вокруг вертикальной оси при помощи, например, червячной передачи (червячные колеса 9 и червяк 10). Подобное устройство позволяет бесступенчато менять величину подачи. Действительно, при повороте линейного статора 8 на угол а направление скорости перемещения магнитного поля изменится относительно оси движения жесткой рейки на тот же угол. Следовательно, составляющая скорости, совпадающая с направлением подачи стола, будт равна V -cosa.
V - Vi - COS а
Меняя угол от О до 90°, можно плавно изменять скорость подачи от ее максимального значения до нуля.
Предмет изобретения
Привод подачи к металлорежущим станкам с регулируемой величиной подачи, отличающийся тем, что, с целью упрощения конструкции за счет устранения преобразования вращательного движения в поступательное и расширения диапазона регулирования подачи, он выполнен в виде гибкой зубчатой рейки, входящей в зацепление с жесткой зубчатой рейкой благодаря деформации, вызываемой линейными статорами, поворотными относительно оси перемещения рейки.
Фиг- /
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ВОЛНОВОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1971 |
|
SU291290A1 |
| ЧЕРВЯЧНЫЙ ИНСТРУМЕНТ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ И ЭКСПЛУАТАЦИИ | 1998 |
|
RU2169061C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2545109C2 |
| МАГНИТНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1973 |
|
SU367297A1 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ (ВАРИАНТЫ) | 2012 |
|
RU2702828C2 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЗУБЧАТЫХ КОЛЕС | 1994 |
|
RU2074794C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЦИЛИНДРИЧЕСКИХ КОЛЕС | 1997 |
|
RU2123915C1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОЙ ГИДРОМАШИНЫ | 2002 |
|
RU2205998C1 |
| Сборная червячная фреза | 2023 |
|
RU2814755C1 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2012 |
|
RU2603849C2 |
.2
9Va.J
