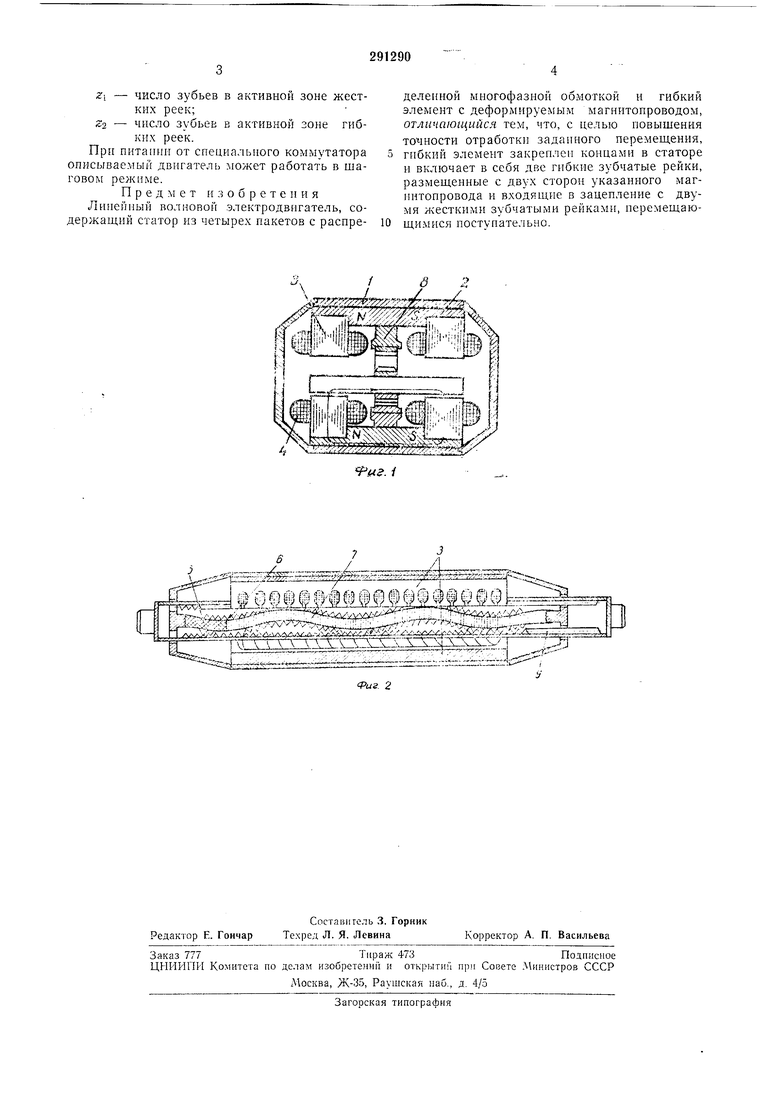
Известные линейные волновые электродвигатели, содержащие статор из четырех пакетов с распределенной многофазной обмоткой и гибкий элемент с деформируелгым магнитопроводом, имеют низкую точность отработки заданного перемещения. В описываемом устройстве с целью повышения точности отработки заданного перемещения гибкий элемент содержит две гибкие зубчатые рейки, размещенные с дву. сторон указанного магнитопровода, закрепленные свои.ми концами в статоре и в.ходян1ие в зацеплеиие с двумя жесткими зубчатыми рейками, перемещающимися поступательпо. На фиг. 1 изображен линейный волновой электродвигатель, ноперечный разрез; на фиг. 2 - то же, продольный разрез. Электродвигатель включает статор / с постоянными магнитами 2, плоскими магпитопроводами 3 и обмоткой 4, создающей бегущее электромагнитное поле. Гибкий элемент 5 закрепленный своими концами в статоре, выполнен в виде дву.х гибких зубчатых реек 6, между которыми размещен гибкий щихтованный магнитоировод 7. В направляющих 8, укрепленных на статоре, перемещаются поступательно жесткие зубчатые рейки 9, входяпше в зацепление с гибкими рейками. фазного напряжения в рабочнх зазорах между гибким магнитопроводом и плоскими магпитоироводами статора возиикпут бегущие электромагнитные поля. Поля, создаваемые плоскими магнитонроводами, паходяп1имися в разных горнзонтальных плоскостях (верхние л нижние) сдвинуты относительно друг друга на длину полуволны деформации. Элементы поверхности гибкого магннтопровода под действием электромагнитных сил будут притягиваться к участкам поверхности н.юских магнитопроводов с нанбольщим значе1П1ем иидукцнн, в результате чего гибкий элсмеит подвергнется поперечной волновой деформации. Число воли деформации гибкого элемеита во избежании перемещения центра масс н возникновения вибрации выбирается целым. При волновой деформации гибкие рейки войдут в зацепление с жесткими рейками. Разиица в числе зубьев жеетких и гибких реек, как и в обычных волновых передачах, равпа чнслу волн .деформации. Перемещение волны деформации гибкого элемента вызовет поступательное двилчение жестких реек со скоростью
z - число зубьев в активной зоне жестких реек;
22 - число зубьев в активной зоне гибких реек.
При питании от специального коммутатора описываемый двигатель может работать в шаговом режиме.
Предмет изобретения Липейиый волновой электродвигатель, содержащий статор из четырех пакетов с распределеиной многофазной обмоткой и гибкий элемент с деформируемым магнитопроводом, отличающийся тем, что, с целью повышения точности отработки заданного перемещения, гибкий элемент закреплен концами в статоре и включает в себя две гибкие зубчатые рейки, размещенные с двух сторон указанного магинтопровода и входящие в зацепление с двумя жесткими зубчатыми рейками, перемещающимися поступательно.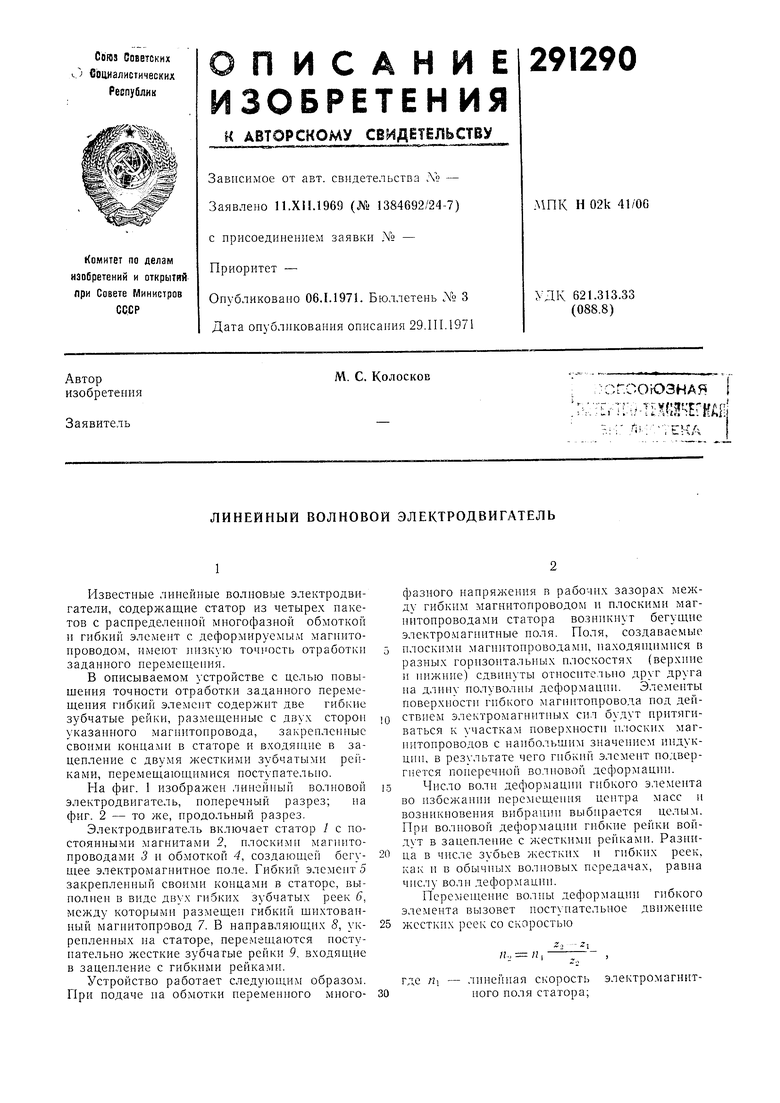
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновой электродвигатель | 1984 |
|
SU1275683A1 |
| Линейный волновой электродвигатель | 1986 |
|
SU1394352A1 |
| ТОРЦЕВОЙ ВОЛНОВОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2010 |
|
RU2418351C1 |
| ПРИВОД ПОДАЧИ К МЕТАЛЛОРЕЖУЩИМ СТАНКАМ | 1968 |
|
SU221456A1 |
| Торцовый волновой электродвигатель | 1983 |
|
SU1108579A1 |
| Торцовый волновой электродвигатель | 1980 |
|
SU877732A1 |
| ВОЛНОВОЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1972 |
|
SU340028A1 |
| ТОРЦЕВОЙ ЭЛЕКТРОДВИГАТЕЛЬ С КАЧАЮЩИМСЯ РОТОРОМ | 2019 |
|
RU2720887C1 |
| Волновой электродвигатель | 1981 |
|
SU959229A1 |
| Торцевой волновой электродвигатель | 1976 |
|
SU604095A1 |
t © I Ailf © f sMtM х
- ТУУУ-С .----i. .-лГ..-Л/..Л---LL-i.- IT-- - Д-;-.,,,-....11,..1LC.,.
; ,i.. :.:.D- fr ---T
..yь
й&й2 - :....)L,
./:i-:;.J
--.,, г .: ,i,,,:, ...........;н.:„-„;...--,Л-.
