Известны различные устройства для предоtBpauleHHH боксования электроподвижного состава, которые с появлением боксования какой-либо оси по достижении определенной величины сигнала боксования снижают силу тяги боксующей оси. Величина снижения выбирается с некоторым запасом, чтобы во всех случаях прекратить боксование. При этом снижение силы тяги производится не только на боксующей в данный момент оси, но и у других осей, электрически с нею связанных. Пониженная (ниже возможной по сцеплению) величина силы тяги на этих осях поддерживается все время, пока не прекратится боксоЁание, после чего на всех осях устанавливается одинаковая сила тяги, и следовательно, йе используются большие возможности по сцеплению других осей. . Таким образом, применение указанных устройств, работающих по релейному принципу, не только не приводит к повыщению общей силы тяги локомотива, но даже несколько снижает ее в течение всего периода их воздействия.
В основу предлагаемого устройства для предотвращения буксования электроподвижного состава положен другой принцип.
временно с этим неровности пути, вызывающие колебаиия подрессоренных масс, вызывают дополнительные динамические изменения нагрузки осей. Под влиянием всех этих,
а также ряда других факторов допустимая по сцеплению величина силы тяги каждой оси изменяется в значительных пределах. Очевидно у локомотива какая-то ось будет находиться в наихудп1их условиях по сцеплению и
раньше других перейдет в режим боксования. Такую ось называют лимитирующей, поскольку она ограничивает возможность повышения силы тяги локомотива, хотя остальные оси неполностью использовали свои возмол иости по
сцеплению. i
С увеличением силы тяги локомотива первой переходит в режим избыточного скольжения лимитирующая ось. Описываемое устройство снижает величину силы тяги этой оси до
уровня, необходимого для прекращения скольжения, и удерживает ее на этом уровне,, в то время как другие оси продолжают развивать большую силу тяги до тех пор, пока какая-либо из этих осей не достигнет своего предела
по сцеплению, т. е. не станет лимитирующей С появлением новой лимитирующей оси устройство устанавливает силу тяги ее на максимально возможнОМ для нее уровне, а другие оси продолжают увеличивать силу тяги и т. п.
ио, величина его определяется в каждый момент времени величиной скорости скольжения данной оси. Благодаря плавному поосному регулированию сила тяги каждой оси Локомотива удерживается на максимально возможном для нее уровне но сцеплению, чем достигается полное использование всех осей по сцеплению, т. е. локомотив развивает максимально возможную силу тяги.
Описанный выше эффект достигается тем, что блоки сравнения предлагаемого устройства выполнены на магнитных усилителях (МУ), компенсационные обмотки которых включены последовательно между собой и подключены параллельно цепи, состоящей из последовательно соединеннйх -датчиков скорости, а обмотки управления - к датчикам скорости своей оси. Выходы МУ соединены через дроссель насыщения (ДН) с индивидуальными исполнительными ортанажй каждой оси, которые выполнены на управляемых вентилях, что позволяет осуществлять поосное регулирование силы тяги каждой оси локомотива и развивать максимально возможную силу тяги.
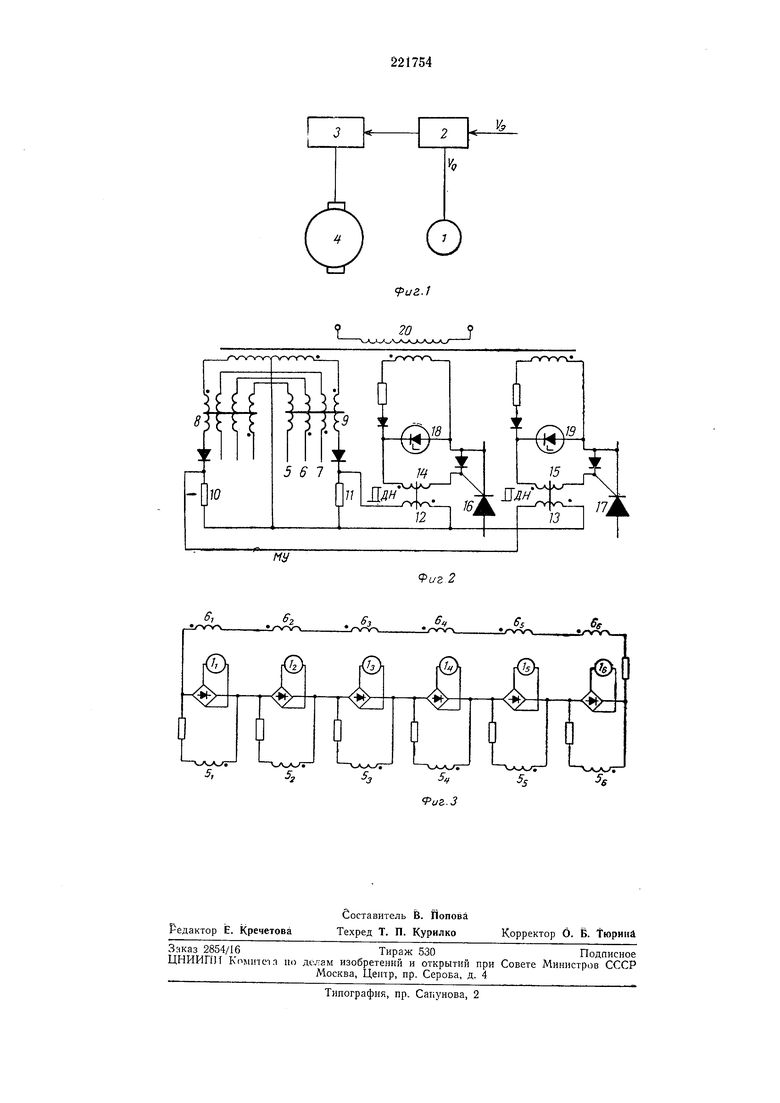
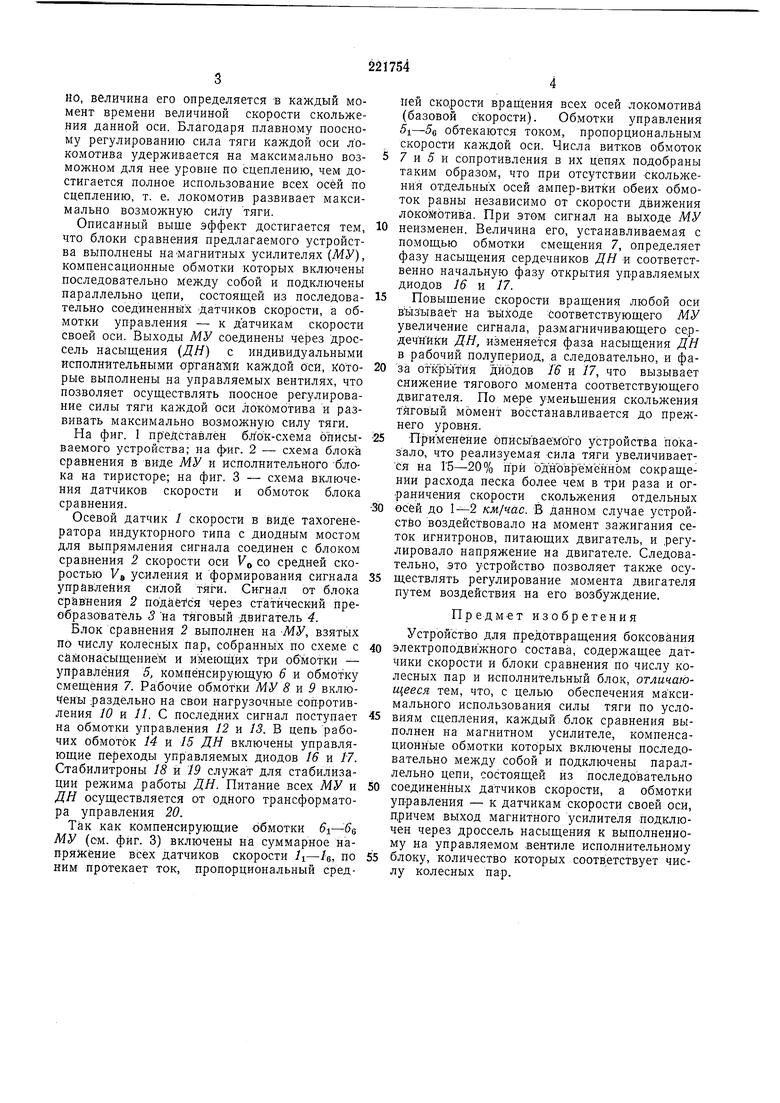
На фиг. 1 преДставлен блок-схема описыБаемого устройства; на фиг. 2 - схема блока сравнения в виде МУ и исполнительного блока на тиристоре; на фиг. 3 - схема включения датчиков скорости и обмоток блока сравнения.
Осевой датчик / скорости в виде тахогенератора индукторного типа с диодным мостом для выпрямления сигнала соединен с блоком сравнения 2 скорости оси V со средней скоростью УЭ усиления и формирования сигнала управления сиЛой тяги. Сигнал от блока сравнения 2 подается через статический преобразователь 3 на тяговый двигатель 4.
Блок сравнения 2 выполнен на -МУ, взятых по числу колеснь1х пар, собранных по схеме с сайонасыщением и имеющих три обмотки - управления 5, комнёнсирующую 6 и обмотку смещения 7. Рабочие обмотки МУ 8 и 9 включены раздельно на свои нагрузочные сопротивления 10 и 11. С последних сигнал поступает на обмотки управления 12 и 13. В цепь рабочих обмоток 14 и 15 ДН включены управляющие переходы управляемых диодов 16 и 17. Стабилитроны 18 и 19 служат для стабилизации режима работы ДН. Питание всех МУ и ДН осуществляется от одного трансформатора управления 20.
Так как компенсирующие обмотки 6i-6s МУ (см. фиг. 3) включены на суммарное напря кение всех датчиков скорости li-h, по ним протекает ток, пропорциональный средней скорости врапдения всех осей локомотива (базовой скорости). Обмотки управления 5i-5в обтекаются током, пропорциональным скорости каждой оси. Числа витков обмоток 7 и 5 и сопротивления в их цепях подобраны таким образом, что нри отсутствии скольжения отдельных осей амнер-витки обеих обмоток равны независимо от скорости движения локойотива. При эт-ом сигнал на выходе МУ неизменен. Величина его, устанавливаемая с помощью обмотки смещения 7, определяет фазу насыщения сердечников ДН « соответственно начальную фазу открытия управляемых диодов 16 и 17.
Повыщение скорости вращения любой оси вйзъшает на выходе Соответствующего МУ увеличение сигнала, размагничивающего сердечнИки ДН, изменяется фаза насыщения ДН в рабочий полупериод, а следовательно, и фаза открьГтия диодов Т6 и 17, что вызывает снижение тягового момента соответствующего двигателя. По мере уменьшения скольжения тяговый момент восстанавливается до прежнего уровня.
Применение описываеМого устройства показало, что реализуемая сила тяги увеличиваетСя На Г5-20% при одновре менном сокращении расхода песка более чем в три раза и ограничения скорости скольжения отдельных осей до 1-2 км/час. В данном случае устройство воздействовало на момент зажигания сеток игнитронов, питающих двигатель, и регулировало напряжение на двигателе. Следовательно, это устройство позволяет также осуществлять регулирование момента двигателя путем воздействия на его возбуждение.
Предмет изобретения
Устройство для Предотвращения боксования электроподвижного состава, содержащее датчики скорости и блоки сравнения по числу колесных пар и исполнительный блок, отличающееся тем, что, с целью обеспечения максимального использования силы тяги по условиям сцепления, каждый блок сравнения выполнен на магнитном усилителе, компенсационные обмотки которых включены последовательно между собой и подключены параллельно цепи, состоящей из последовательно соединенных датчиков скорости, а обмотки управления - к датчикам скорости своей оси, причем выход магнитного усилителя подключен через дроссель насыщения к выполненному на управляемом вентиле исполнительному блоку, количество которых соответствует числу колесных пар.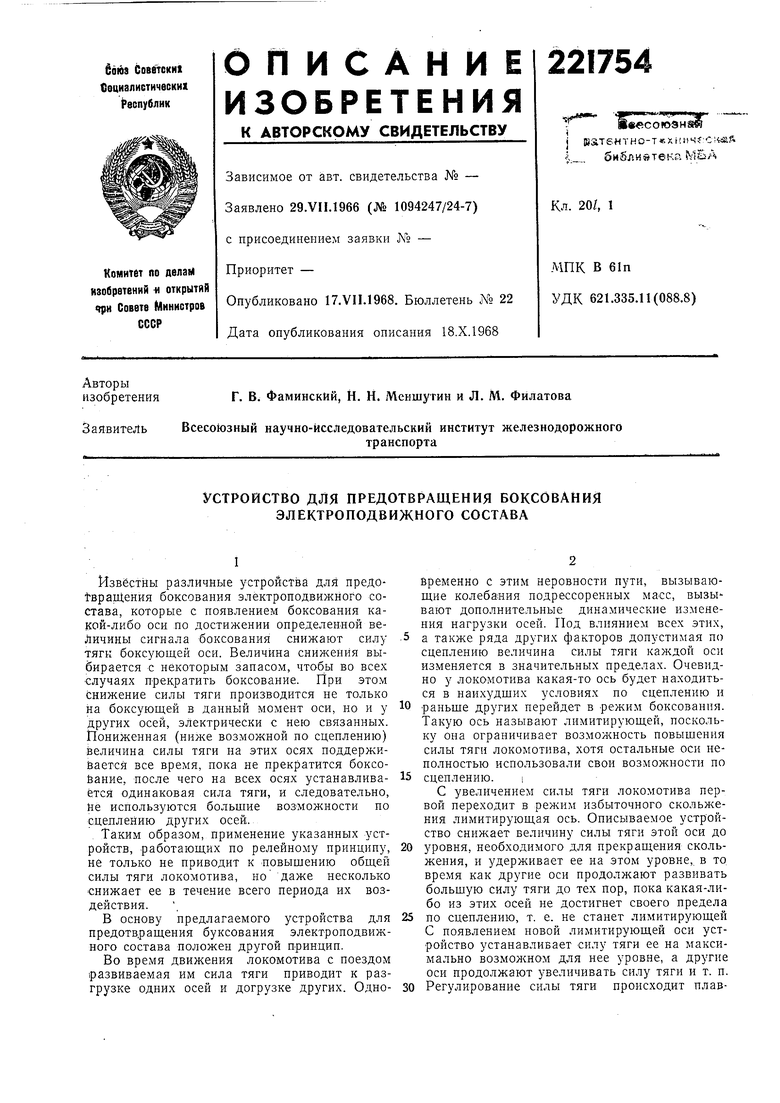
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2540223C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2359400C2 |
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ | 2005 |
|
RU2283783C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ЛИКВИДАЦИИ БОКСОВАНИЯ И ЮЗА КОЛЕСНО-МОТОРНЫХ БЛОКОВ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2364525C2 |
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2020 |
|
RU2741851C1 |
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2019 |
|
RU2720864C1 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2018 |
|
RU2702549C1 |
| СПОСОБ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА С ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2382707C2 |