Изобретение относится к области железнодорожного транспорта и предназначено для повышения тяговых качеств локомотивов с тяговыми электродвигателями постоянного тока.
Известен способ обнаружения боксования и юза колесных пар локомотивов с электрической передачей и параллельным соединением тяговых электродвигателей (ТЭД), основанный на сравнении токов, протекающих по цепям параллельно соединенных ТЭД, при этом токи измеряются косвенным способом посредством контроля и сравнения потенциалов равнопотенциальных точек цепей ТЭД (Схемы электрических цепей тепловозов ТЭП70, 2ТЭ116: Учебное иллюстрированное пособие / В.В. Грачев, Б.Н. Морошкин, С.В. Сергеев, Д.Н. Курилкин, А.А. Надежин. - М.: Маршрут, 2006. - стр. 81). Устройство, реализующее этот способ, включает шестифазный полупроводниковый мост, средние точки которого подключены к равнопотенциальным точкам цепей ТЭД, а катодные и анодные выводы моста - к исполнительным реле боксования и юза.
Известен способ обнаружения боксования и юза колесных пар локомотивов с электрической передачей и последовательно-параллельным соединением ТЭД, основанный на сравнении напряжений на якорных обмотках последовательно соединенных ТЭД (Богатырев С.Б. Электрическая схема тепловоза ТЭМ18ДМ [Текст] / Богатырев С.Б., Мамочкина Л.Н., Кашников Г.Ф. и др. // Журнал «Локомотив». - 2009. - №8. - с. 22-25). Устройство, реализующее этот способ, включает цепь из трех (по количеству последовательно соединенных якорных обмоток ТЭД) последовательно соединенных резисторов с одинаковым омическим сопротивлением, включенную параллельно последовательно соединенным якорным обмоткам ТЭД, и датчик напряжения (или исполнительное электромагнитное реле), входы которого подключены к эквипотенциальным точкам цепи последовательно соединенных якорных обмоток ТЭД и цепи резисторов. Боксование определяется в случаях, когда контролируемое датчиком значение напряжения (напряжение на катушке исполнительного электромагнитного реле) превышает заданное пороговое значение (20В).
Недостатком обоих способов является низкая чувствительность, обусловленная, с одной стороны, неизбежно высоким порогом срабатывания исполнительных реле или системы регулирования напряжения тягового генератора, связанным с различием электромеханических характеристик ТЭД, активных сопротивлений якорных обмоток ТЭД и разностью диаметров колесных пар тепловоза, а с другой стороны, снижением разности потенциалов в контролируемых точках силовой цепи при одном и том же проскальзывании колесных пар по мере снижения напряжения тягового генератора. В результате при движении локомотива с малой скоростью и высоких значениях тока (разгон состава поезда), когда вероятность потери сцепления с рельсами и возникновения боксования колесных пар наиболее высока, чувствительность обоих способов резко снижается вследствие низкого напряжения на якорных обмотках ТЭД.
Известен способ обнаружения боксования и юза колесных пар, основанный на анализе спектральных характеристик сигнала измеренной угловой скорости вращения колеса (J.H. Yu. Re-Adhesion control based on wheelset dynamics in railway traction system/, T.X. Mei, D.A Wilson // United Kingdom Automatic Control Council papers. Available at: http:/ukacc.group.shef.ac.uk/proceedings/control2006/papers/f97.pdf), согласно которому измеряют угловою скорость вращения каждого из колес колесной пары, вычисляют их разность, выполняют спектральный анализа сигнала разности угловых скоростей вращения колес и контролируют амплитуду гармонической составляющей спектра, соответствующей собственной частоте крутильных колебаний двухмассовой системы "колесо - ось - колесо".
Недостатком способа является сложность реализации, обусловленная, во-первых, потребностью в большом количестве датчиков угловой скорости колес, причем монтироваться они должны на буксе каждого из колес, увеличивая таким образом величину неподрессоренной массы экипажа, что отрицательно сказывается на его динамических характеристиках, а, во-вторых, чрезвычайно высокой потребной точностью измерения угловой скорости вращения колес. Амплитуда сигнала разности угловых скоростей колес на начальной стадии развития боксования не превышает 0.05 рад/с. Для измерения такой разности при скорости 30 км/ч погрешность измерения угловой скорости каждой из колесных пар не должна превосходить 0,00048%.
Известен способ обнаружения боксования и юза колес транспортного средства с электрической передачей (RU №2657157, B60L 3/10, В61С 15/08, B60L 15/10, G01R 23/16, 08.06.2018, Бюл. №16), принятый за прототип, основанный на анализе спектральных характеристик напряжения на обмотках возбуждения тяговых электродвигателей и состоящий в том, что выходной сигнал датчика одного из параметров цепи тягового электродвигателя подвергают спектральному анализу, в результате которого определяют амплитудно-частотную характеристику сигнала и контролируют уровень амплитуд гармонических составляющих сигнала, в качестве параметра цепи тягового электродвигателя используют падение напряжения на обмотках полюсов тягового электродвигателя, а боксование и юз определяют по увеличению относительной мощности гармонических составляющих амплитудно-частотного спектра выходного сигнала датчика в ограниченной полосе частот, определяемой инерционными характеристиками тягового привода транспортного средства.
Недостатки способа заключается в следующем.
Во-первых, при последовательном соединении обмоток возбуждения нескольких ТЭД увеличивается суммарная индуктивность цепи кратно количеству последовательно включенных обмоток, вследствие чего при изменении напряжения генератора (например, при изменении положения рукоятки контроллера) в силовой цепи возникают автоколебания с частотами, близкими к собственным частотам тягового привода при движении на пределе сцепления, что приводит к увеличению амплитуд гармонических составляющих в контролируемой полосе спектра в отсутствии боксования. Это обуславливает необходимость повышения порогового значения относительной мощности гармонических составляющих контролируемой части спектра во избежание ложного срабатывания устройства, реализующего данный способ обнаружения боксования, что означает снижение чувствительности способа.
Во-вторых, для раздельного контроля напряжения на обмотках каждого из ТЭД, предусмотренного прототипом изобретения, потребуется шесть датчиков напряжения (по количеству ТЭД). Между тем, без поосного (индивидуального) управления ТЭД локализация боксующей колесной пары в приводе является излишней, поскольку, меры по ликвидации боксования (снижение напряжения тягового генератора) будут приниматься ко всем ТЭД одновременно. По этой причине использование шести датчиков напряжения является избыточным и приводит к ненужному удорожанию системы противобоксовочной защиты.
Изобретением решается задача повышения чувствительности системы обнаружения боксования и юза транспортного средства с тяговыми электродвигателями постоянного тока, соединенными последовательно или последовательно - параллельно.
Техническим результатом реализации предлагаемого способа является повышение чувствительности системы обнаружения боксования и юза колес танспортного средства с электрической передачей и последовательно или последовательно-параллельно соединенными тяговыми электродвигателями за счет использования в качестве параметра, контролируемого датчиком, разности потенциалов между точками цепи последовательно соединенных якорных обмоток тяговых электродвигателей и цепи включенных параллельно им последовательно соединенных резисторов, при этом боксование и юз определяют по увеличению относительной мощности гармонических составляющих амплитудно-частотного спектра выходного сигнала датчика в ограниченной полосе частот, определяемой инерционными характеристиками тягового привода транспортного средства.
Технический результат достигается тем, что в способе обнаружения боксования и юза колес транспортного средства с электрической передачей, состоящем в том, что выходной сигнал датчика одного из параметров цепи тягового электродвигателя подвергают спектральному анализу, в результате которого определяют амплитудно-частотную характеристику сигнала и контролируют уровень амплитуд гармонических составляющих сигнала, а боксование и юз определяют по увеличению относительной мощности гармонических составляющих амплитудно-частотного спектра выходного сигнала датчика в ограниченной полосе частот, определяемой инерционными характеристиками тягового привода транспортного средства, в качестве параметра цепи тягового электродвигателя используют разность потенциалов между точками цепи последовательно соединенных якорных обмоток тяговых электродвигателей и цепи включенных параллельно им последовательно соединенных резисторов.
Заявленный способ поясняется чертежами.
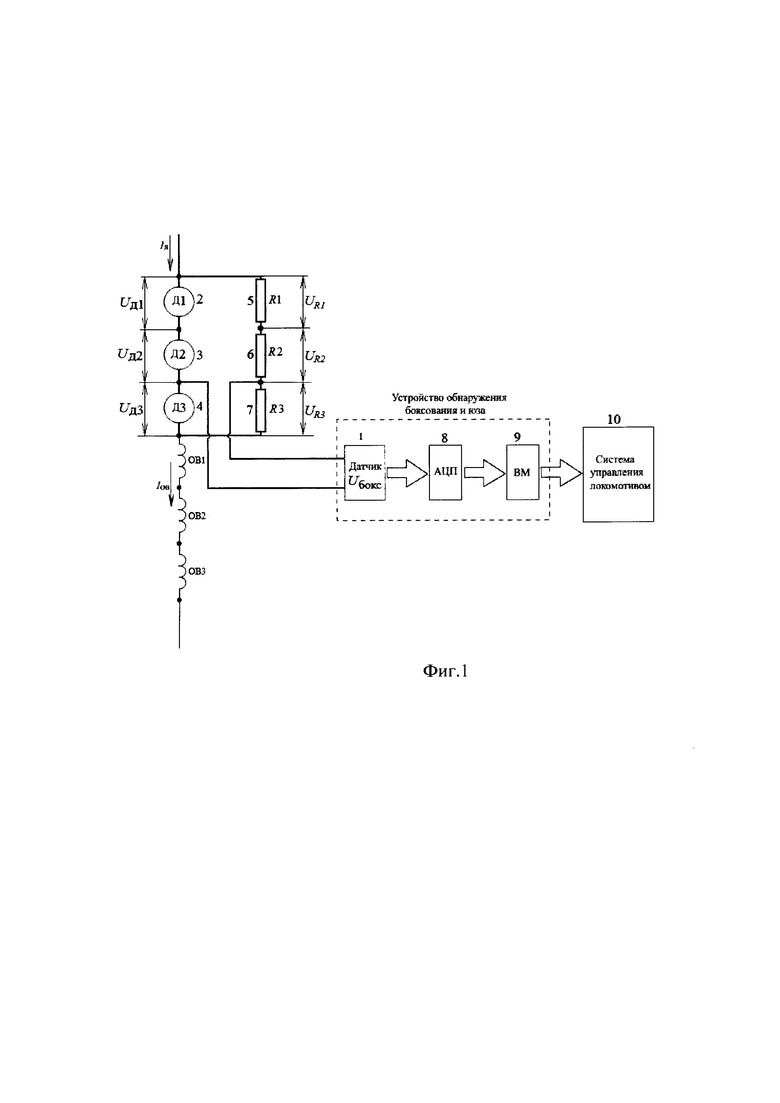
Фиг. 1. Функциональная схема устройства для реализации способа.
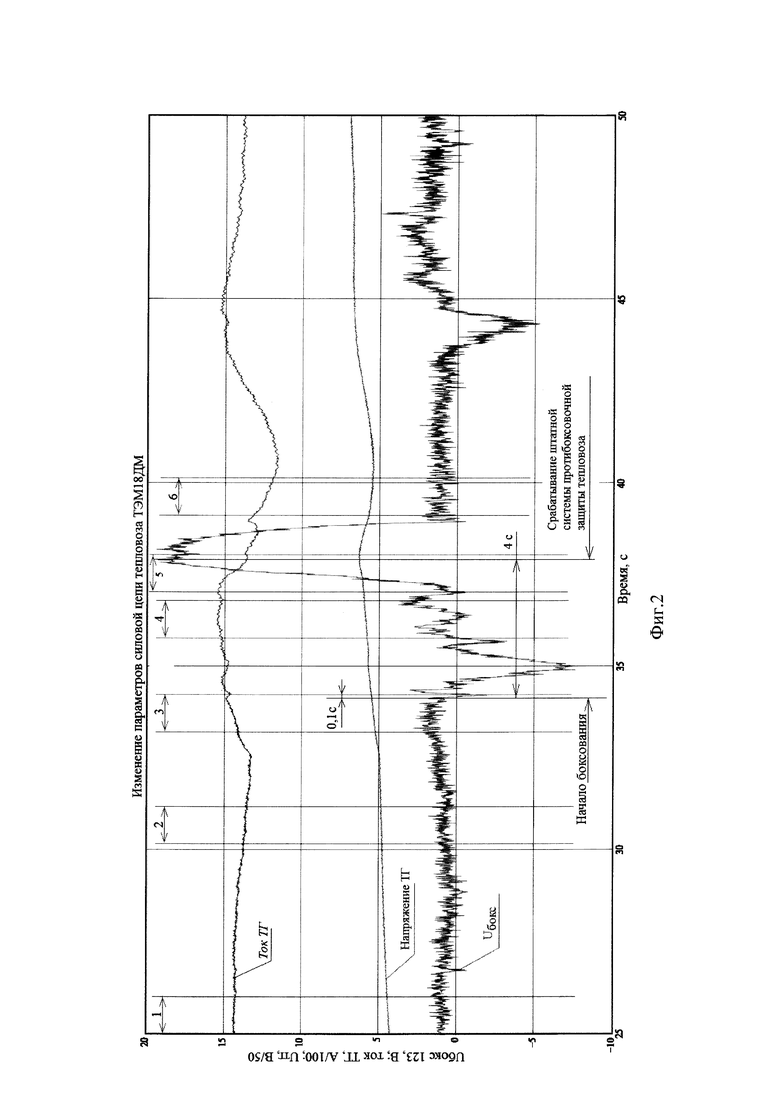
Фиг. 2. Кривые изменения значений параметров силовой цепи тепловоза ТЭМ18ДМ при его движении при его движении.
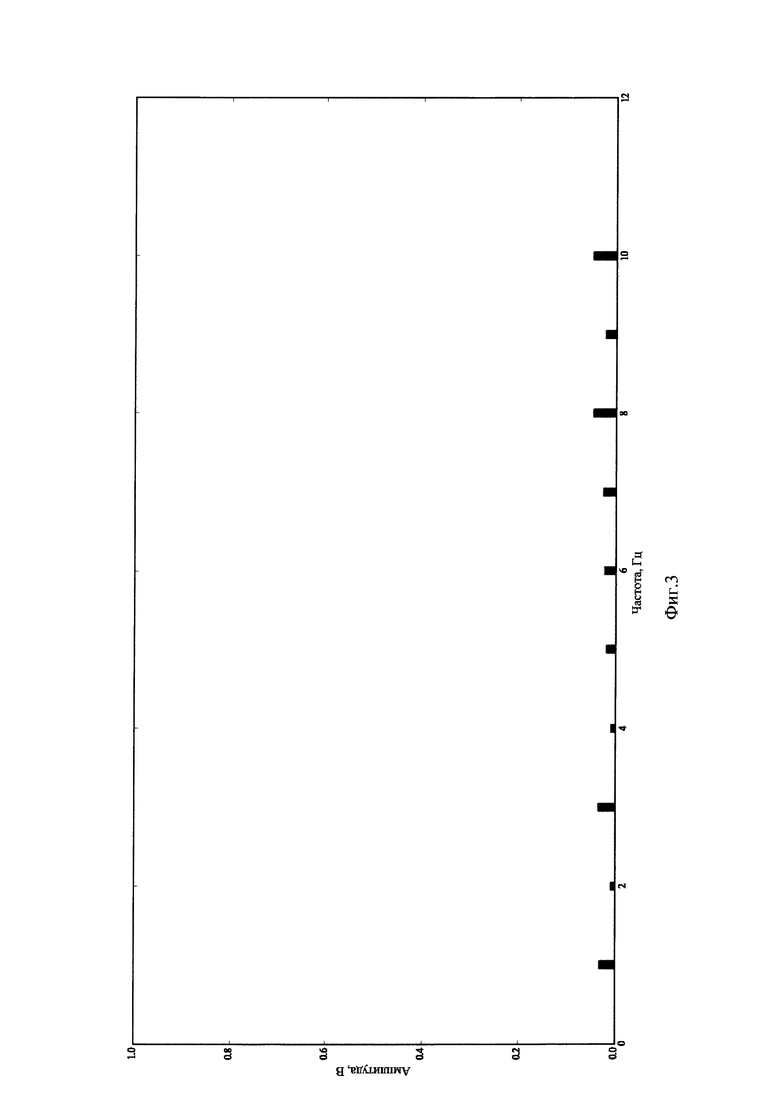
Фиг. 3. Амплитудный спектр фрагмента контролируемого сигнала (Uбокс) в окне 1 (боксование отсутствует).
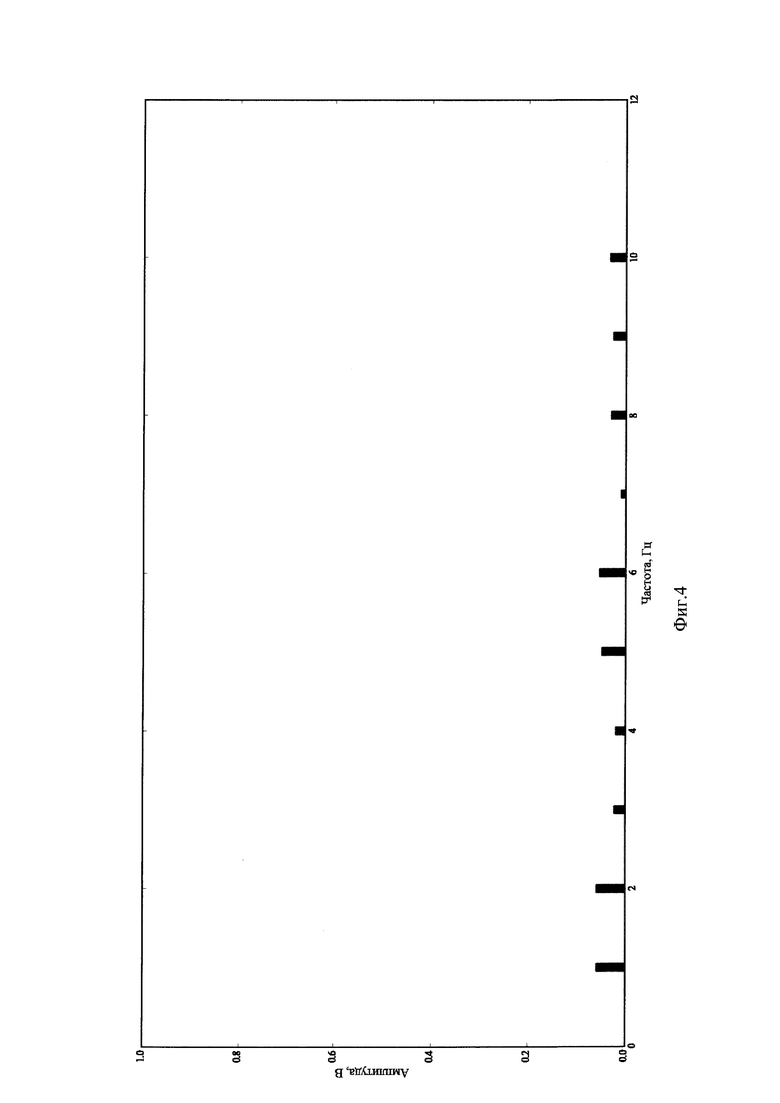
Фиг. 4. Амплитудный спектр фрагмента контролируемого сигнала (Uбокс) в окне 2 (боксование отсутствует).
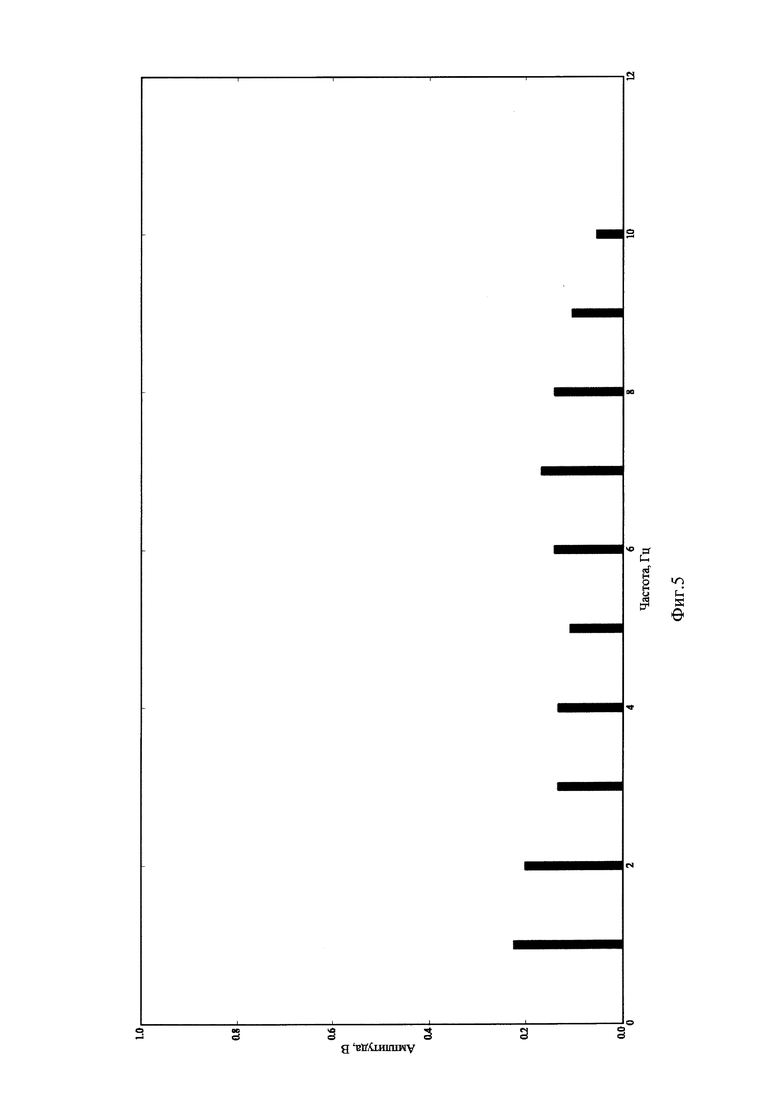
Фиг. 5. Амплитудный спектр фрагмента контролируемого сигнала (Uбокс) в окне 3 (через 0,1 с после начала боксования одного из ТЭД).
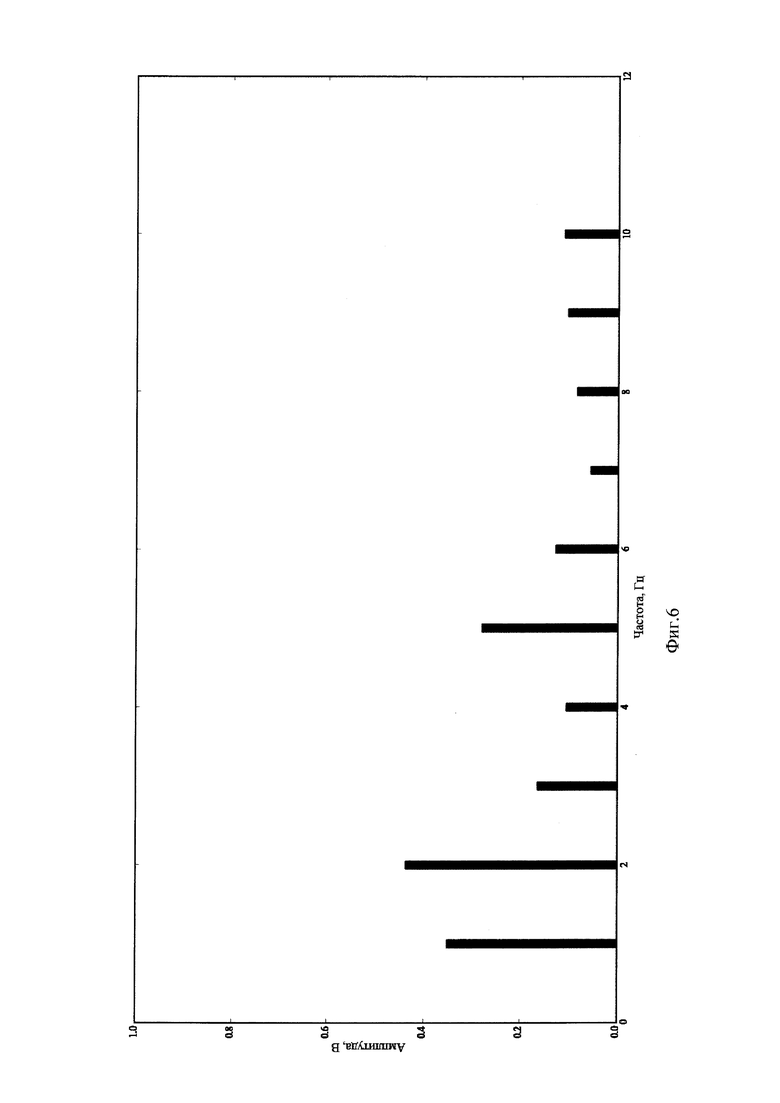
Фиг. 6. Амплитудный спектр фрагмента контролируемого сигнала (Uбокс) в окне 4 (развитие процесса боксования).
Фиг. 7. Амплитудный спектр фрагмента контролируемого сигнала (Uбокс) в окне 5 (устойчивое боксование).
Фиг. 8. Амплитудный спектр фрагмента контролируемого сигнала (Uбокс) в окне 6 (прекращение боксования вследствие снижения напряжения тягнового генератора).
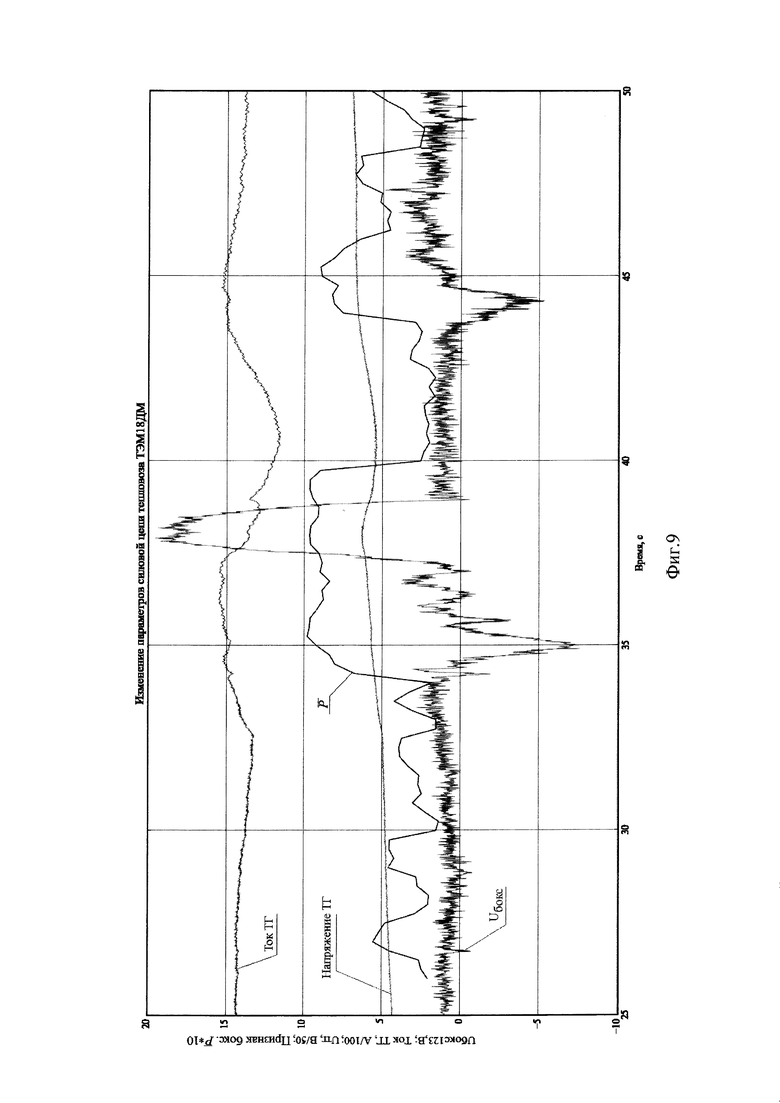
Фиг. 9. Кривая изменения признака боксования  в различных режимах работы силовой цепи тепловоза.
в различных режимах работы силовой цепи тепловоза.
Предлагаемый способ может быть реализован с использованием устройства, функциональная схема которого приведена на фиг. 1.
Оно включает датчик напряжения 1, подключенный к цепи последовательно соединенных якорных обмоток ТЭД 2-4 и к цепи последовательно включенных резисторов 5-7, подключенной параллельно цепи якорных обмоток ТЭД. Выход датчика напряжения 1 соединен с входом аналого-цифрового преобразователя 8, выход которого подключен к шине данных вычислительного модуля 9, выход которого связан с одним из входов системы управления локомотивом 10.
Функционирует устройство следующим образом. Датчик напряжения 1 постоянно измеряет величину разности потенциалов между эквипотенциальными (при отсутствии боксования) точками цепи якорных обмоток ТЭД 2-4 и параллельно ей включенной цепи резисторов 5-7. Выходной сигнал датчика напряжения 1 преобразуется в цифровую форму посредством аналого-цифрового преобразователя 8 и считывается вычислительным модулем 9. После накопления выборки в вычислительном модуле 9 для этой выборки выполняется дискретное преобразование Фурье (А.Б. Сергиенко. Цифровая обработка сигналов. - СПб.: Питер, 2002 - стр. 250), в результате которого определяются значения амплитуд гармонических составляющих спектра и вычисляется значение относительной мощности гармонических составляющих в ограниченной полосе частот, определяемой величиной моментов инерции колесной пары и якоря тягового электродвигателя, а также индуктивностью обмоток полюсов тяговых электродвигателей.
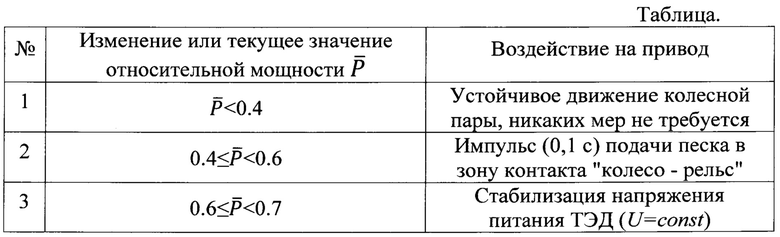
Это значение по каналу обмена данными передается в систему управления локомотивом 10, которая, в зависимости от полученного значения, осуществляет воздействие на привод в соответствии с таблицей.
В качестве датчика напряжения 1 может использоваться датчик LA 25-NP/SP11 (ООО "ЛЕМ Россия"). Аналого-цифровой преобразователь 8 и вычислительный модуль 9 могут быть реализованы с помощью одноплатного многофункционального модуля РСМ-3718Н формата PC/104 (Advantech Co., Ltd.). Поддерживаемые этим модулем интерфейсы Ethernet и RS232/RS485 позволяют обеспечить его взаимодействие практически с любой бортовой микропроцессорной системой управления современного локомотива, в том числе с системой МСУ-ТП тепловоза 2ТЭ116У ("Система МСУ-ТП на тепловозе 2ТЭ116У" / С.И. Ким, С.В. Сергеев, В.И. Харитонов и др. - Журнал "Локомотив", 2009 г., №8 - стр. 15).
При устойчивом (без избыточного проскальзывания) движении колесных пар значения напряжений UД1-UД3 на якорных обмотках ТЭД примерно равны и соответствуют напряжениям UR1-UR3 на резисторах R1-R3, в результате разность потенциалов между точками подключения датчика 1 равна нулю.
При движении колесной пары на пределе сцепления имеют место пульсации ее угловой скорости вследствие проскальзывания с амплитудой не более 2% и частотой до 20 Гц. Эти пульсации приводят к соответствующим изменениям электродвижущей силы (ЭДС) якоря ТЭД, связанного с проскальзывающей колесной парой и направленной против напряжения тягового генератора, приложенного к цепи ТЭД, что, в свою очередь, приводит к изменению напряжения на якорной обмотке соответствующего ТЭД, которое связано с ЭДС этой обмотки зависимостью:

где Uk - напряжение на якорной обмотке k-го ТЭД, В;
wk - угловая скорость якоря k-го ТЭД, с-;
i - ток якорных обмоток ТЭД, А;
rя - омическое сопротивление якорной обмотоки ТЭД, Ом;
E(wk, i) - ЭДС якорной обмотки ТЭД - функция от wk и i, В.
Изменение ЭДС одной из последовательно включенных якорных обмоток ТЭД приводит к перераспределению напряжения между ними, в результате которого напряжение на обмотке ТЭД, соединенного с проскальзывающей колесной парой, изменяется пропорционально ее угловой скорости, а напряжение на остальных двух соединенных с ней обмоткой изменяется в противоположную сторону, т.е. при увеличении угловой скорости колесной пары напряжение на якорной обмотке связанного с ней ТЭД возрастает, в то время, как на остальных двух снижается, и наоборот. Поскольку распределение напряжения на резисторах 5-7 остается неизменным и равным между ними, между точками подключения датчика 1 возникает разность потенциалов, которая измеряется датчиком 1 с заданной частотой дискретизации и преобразуется в цифровой сигнал аналого-цифровым преобразователем 8. Вычислительный блок 9 накапливает заданный объем выборки (окно сигнала), после чего она подвергается спектральному анализу с использованием алгоритма быстрого преобразования Фурье, в результате которого определяются амплитуды гармоник спектра в определенном частотном диапазоне. При наличии избыточного проскальзывания хотя бы одной из трех колесных пар, якорные обмотки тяговых электродвигателей которых последовательно соединены, амплитуды этих гармоник возрастают, что и является признаком боксования одной или нескольких колесных пар.
Этот вывод подтверждается результатами обработки значений напряжения между точками подключения датчика 1 в соответствии с заявляемым способом. Из исходного массива значений напряжения, полученного его измерением во время работы тепловоза с дискретностью 0,01 с, формируется выборка из 100 значений (отсчетов). Эта выборка подвергается дискретному оконному преобразованию Фурье (ДПФ) (А.Б. Сергиенко. Цифровая обработка сигналов. - СПб.: Питер, 2002 - стр. 250), в результате которого определяются амплитуды гармонических составляющих сигнала. Разрешение спектра по частоте составит 1/(100*0,01)=1 Гц. Учитывая осевую симметрию спектра, вычисляемая ширина спектра составит 50*1=50 Гц. Сдвиг окна прямоугольной формы осуществлялся с шагом 0,25 с.
На фиг. 2 представлены кривые изменения нескольких параметров силовой цепи тепловоза ТЭМ18ДМ, полученные измерением их непосредственно во время работы локомотива, с границами нескольких окон ДПФ. Кривая красного цвета соответствует напряжению датчика Uбокс (фиг. 1).
На фиг. 3 - фиг. 7 представлены результаты спектрального анализа напряжения Uбокс в окнах, указанных на фиг. 2. На рисунках изображена информативная полоса спектра шириной 10 гц (гармоники 1-10).
Как следует из фиг. 2, окна №1 и №2 соответствуют устойчивому движению всех трех колесных пар, связанных с ТЭД1-3, поэтому разность потенциалов между эквипотенциальными точками цепи якорных обмоток ТЭД1-3 и включенных параллельно им резисторов не превышает 1 В. Как следует из спектров окон №1 и №2, приведенных, соответственно, на фиг. 3 и фиг. 4, амплитуды низкочастотных составляющих в спектре Uбокс не превышают 0,07 В.
Окно №3 на фиг. 2 соответствует началу повышенного проскальзывания одной из трех колесных пар, о чем свидетельствует увеличение среднего значения напряжения датчика с изменением его знака. Эти изменения значения и характера изменения напряжения Uбокс заметно изменяют амплитуды низкочастотных гармоник его спектра, соответствующего этому окну (фиг. 5). Величина их возрастает до 0,12-0,22 В, т.е. в 1,5-3 раза.
Окно №4 на фиг. 2 соответствует периоду развития боксования, причем, судя по изменению знака Uбокс, участвует в нем как минимум две колесных пары. Как следует из. фиг. 6, это приводит к дальнейшему увеличению амплитуд низкочастотной полосы спектра Uбокс (до 0,5 В).
Окно №5 на фиг. 2 соответствует полной потере сцепления третьей колесной парой и переходу ее к устойчивому боксованию. Этот процесс сопровождается резким многократным увеличением амплитуд низкочастотных гармоник спектра Uбокс (фиг. 7).
Только на этом этапе развития боксования, т.е. уже после полной потери сцепления колесной парой, когда для ликвидации боксования требуется глубокое снижение напряжения тягового генератора с большой потерей силы тяги тепловоза, боксование обнаруживается штатной системой противобоксовочной защиты тепловоза, которая реагирует на уровень напряжения датчика Uбокс, причем порог срабатывания защиты составляет 20 В.
После восстановления сцепления в результате резкого снижения напряжения тягового генератора с 300 В до 200 В и тока тягового генератора с 1550 А до 1200 А (окно №6 на фиг. 2), амплитуды гармоник информативной полосы спектра также снизились до уровня 0,05-0,07 В.
Таким образом, колебания угловой скорости колеса при движении на пределе сцепления с рельсами в процессе реализации тягового или тормозного момента приводят к увеличению амплитуды и энергии низкочастотных гармонических составляющих напряжения Uбокс между эквипотенциальными точками цепи последовательно соединенных ТЭД и включенной параллельно ей цепи последовательно соединенных резисторов.
Границы информативной области спектра определяются инерционными характеристиками звеньев тягового привода (колесной пары, якоря тягового электродвигателя) и индуктивностью обмоток полюсов тягового электродвигателя. Для тягового привода тепловоза серии ТЭМ18ДМ эта область включает гармонические составляющие порядка 1-10 с частотами 1-10 Гц. Границы информативной области амплитудно-частотного спектра напряжения на полюсах ТЭД для тяговых приводов локомотивов других серий и иных транспортных средств с электрической передачей постоянного тока определяются экспериментально в результате анализа изменения параметров привода при движении на пределе сцепления колес с рельсами.
В качестве объективного вычисляемого показателя, отражающего изменение амплитудного спектра напряжения Uбокс между эквипотенциальными точками цепи последовательно соединенных ТЭД и включенной параллельно ей цепи последовательно соединенных резисторов при реализации предельных значений тягового или тормозного момента, может использоваться относительная мощность гармоник информативной области спектра. Согласно теореме Парсеваля (А.Б. Сергиенко. Цифровая обработка сигналов. - СПб.: Питер, 2002 - стр. 55), квадрат нормы сигнала, пропорциональный его мощности в заданном временном интервале, равен сумме квадратов амплитуд гармонических составляющих сигнала в этом интервале. Тогда мощность, приходящаяся на определенную область спектра, может быть вычислена как сумма квадратов амплитуд гармонических составляющих, попадающих в эту область.
Мощность гармоник информативной области спектра напряжения на обмотках полюсов ТЭД, приведенная к сопротивлению 1 Ом:

где k - порядок гармоники;
Аk - амплитуда гармоники k-го порядка, В.
Недостатком этого показателя с точки зрения использования его для обнаружения предельных по сцеплению режимов движения колесной пары является зависимость его от абсолютных значений амплитуд гармонических составляющих.
С целью исключения этого недостатка в качестве объективной количественной оценки изменения спектра при боксовании колесной пары предлагается использовать относительную мощность, приходящуюся на гармоники информативной области спектра и вычисляемую по формуле:

где k - порядок гармоники.
Ширина контролируемой области спектра, энергия которой используется в качестве базового значения для вычисления относительной мощности, определяется частотой дискретизации при измерении напряжения и шириной окна ДПФ.
Изменение значения показателя (3) в период времени, соответствующий фиг. 2, представлено на фиг. 9. Анализ его показывает, что использование данного показателя позволяет выявить избыточное проскальзывание колесной пары задолго до начала развития процесса боксования, которое выявляется в течение 0,1 с, т.е. на 4-5 с быстрее, чем штатной системой противобоксовочной защиты тепловоза. Это позволяет своевременно принять меры по предотвращению дальнейшего развития боксования или юза.
В зависимости от текущего значения (3) показателя и характера его изменения возможна реализация многоступенчатой защиты с применением разных способов воздействия на тяговый привод с целью ограничения проскальзывания колесной пары. Один из возможных вариантов такой защиты представлен в таблице.

Использование предлагаемого способа по сравнению с прототипом позволит уменьшить (в три раза) количество датчиков напряжения, используемых для обнаружения боксования, повысить тяговые и тормозные свойства локомотивов и иных рельсовых транспортных средств с последовательно и последовательно - параллельно соединенными тяговыми электродвигателями постоянного тока за счет своевременного обнаружения повышенного проскальзывания колес и уменьшения потерь силы тяги и тормозного усилия при его ликвидации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2016 |
|
RU2657157C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2540223C1 |
| УСТРОЙСТВО ДЛЯ ИМПУЛЬСНОЙ ПОДАЧИ ПЕСКА ПОД КОЛЕСА ЛОКОМОТИВА | 2008 |
|
RU2347698C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ОТ БОКСОВАНИЯ | 1996 |
|
RU2125518C1 |
| Устройство обнаружения боксования и юза колес транспортного средства с электрической передачей | 1986 |
|
SU1418104A1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЗАЩИТЫ ОТ БОКСОВАНИЯ ДЛЯ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2440898C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ЛИКВИДАЦИИ БОКСОВАНИЯ И ЮЗА КОЛЕСНО-МОТОРНЫХ БЛОКОВ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2010 |
|
RU2443577C1 |
| Устройство обнаружения боксования колесных пар локомотива | 1981 |
|
SU1084156A1 |
| Устройство для защиты от боксования транспортных средств с тяговыми электродвигателями последовательного возбуждения | 1979 |
|
SU906737A1 |


Изобретение относится к системам, указывающим на пробуксовку или юз колес на транспортных средствах с электротягой. Способ обнаружения боксования и юза колес транспортного средства с электрической передачей постоянного тока заключается в следующем. Выходной сигнал датчика одного из параметров цепи тягового электродвигателя подвергают спектральному анализу, в результате которого определяют амплитудно-частотную характеристику сигнала и контролируют уровень амплитуд гармонических составляющих сигнала. Боксование и юз определяют по увеличению относительной мощности гармонических составляющих амплитудно-частотного спектра выходного сигнала датчика в ограниченной полосе частот, определяемой инерционными характеристиками тягового привода транспортного средства. При этом в качестве параметра цепи тягового электродвигателя используют разность потенциалов между точками цепи последовательно соединенных якорных обмоток тяговых электродвигателей и включенной параллельно им цепи последовательно соединенных резисторов. Технический результат изобретения заключается в повышении чувствительности системы обнаружения боксования и юза колес транспортного средства с электрической передачей. 9 ил., 1 табл.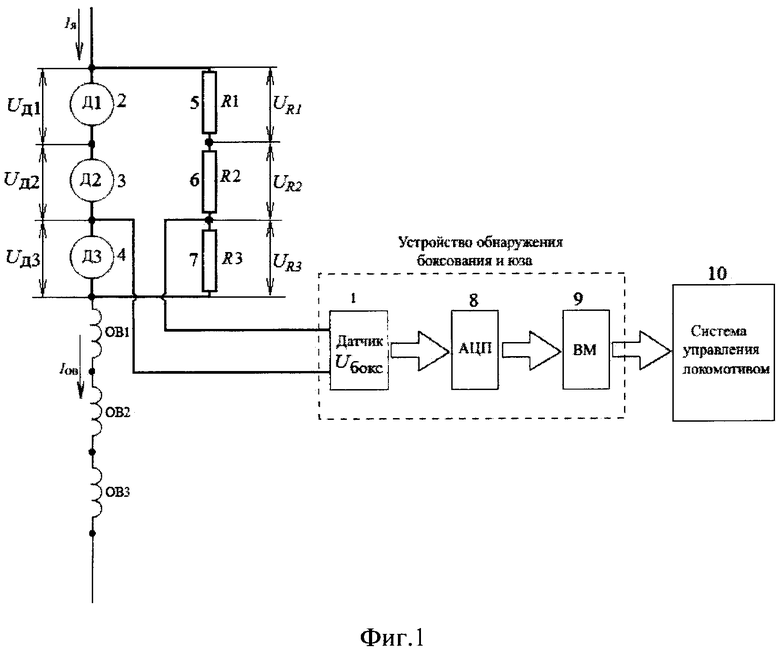
Способ обнаружения боксования и юза колес транспортного средства с электрической передачей постоянного тока, состоящий в том, что выходной сигнал датчика одного из параметров цепи тягового электродвигателя подвергают спектральному анализу, в результате которого определяют амплитудно-частотную характеристику сигнала и контролируют уровень амплитуд гармонических составляющих сигнала, а боксование и юз определяют по увеличению относительной мощности гармонических составляющих амплитудно-частотного спектра выходного сигнала датчика в ограниченной полосе частот, определяемой инерционными характеристиками тягового привода транспортного средства, отличающийся тем, что в качестве параметра цепи тягового электродвигателя используют разность потенциалов между точками цепи последовательно соединенных якорных обмоток тяговых электродвигателей и включенной параллельно им цепи последовательно соединенных резисторов.
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2016 |
|
RU2657157C1 |
| Устройство для разложения изображения | 1935 |
|
SU45340A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ТЕПЛОВОЗА С ПОСЛЕДОВАТЕЛЬНО СОЕДИНЕННЫМИ ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ | 1992 |
|
RU2031010C1 |
| Устройство обнаружения боксования и юза колес транспортного средства с электрической передачей | 1988 |
|
SU1641665A1 |
| US 5610819 A, 11.03.1997. | |||

