Известны способы коррекции систем введением в закон регулирований пронорниональной составля.ющей производных и други.к воздействий. Для этого приходится преобразовывать сигнал с дискриминатора в 1налоговую форму и затем добавлять другие аналоговые -сигна.ты.
Предложенный способ отличается от известных тем, что измеряют сигналы коррекщпт и линией задержки с регулируемым временем запаздывания сдвигают во взаимно иротивоположны.х направлениях фазы сравниваемых lia фазовом дискриминаторе сигналов дву.х чаггот на величину, проиорциональную сумме всех корректируюи их сигналов. Это позволяет улучшить динамические свойства замкнутой системы при улроичении ее регулируюгдей части.
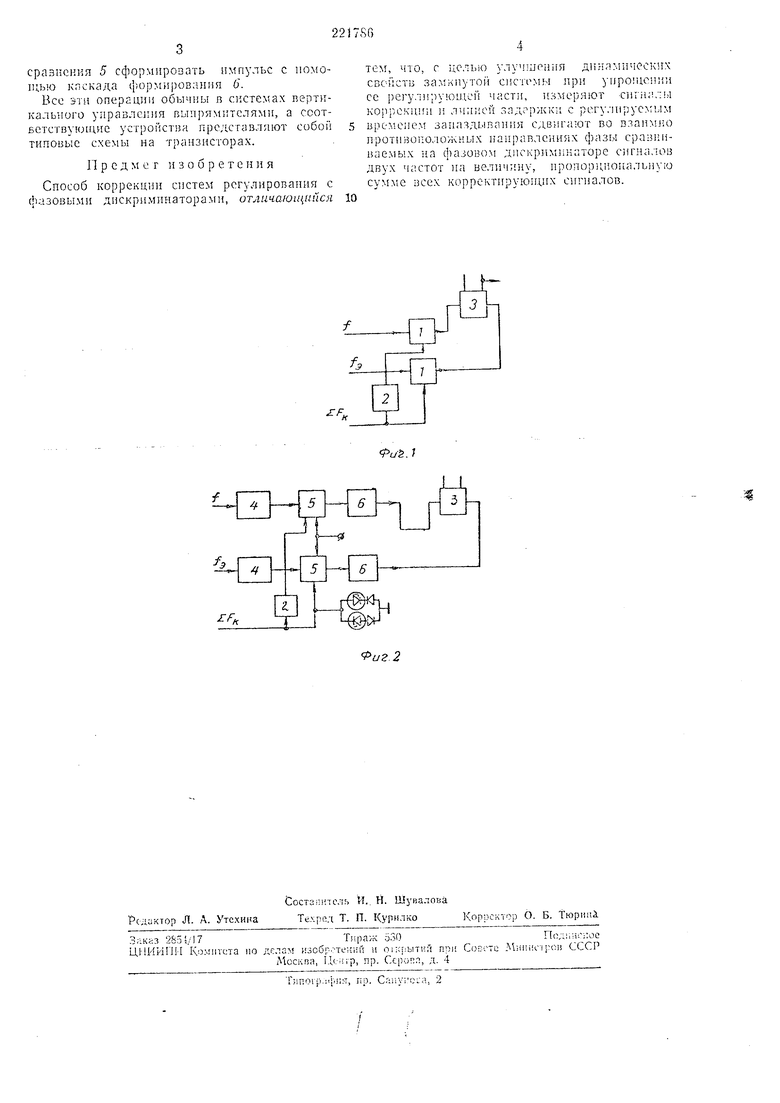
Способ поясняется фиг. 1 и 2.
Способ заключается в сдвиге по фазе сравниваемых фазовым дискршппгатором частот во взаимно противоположных иаправлениях, причем величина сдвига должна быть иро.аорционильна су.мме добавочных воздействий. Такой сдвиг частот по фазе сразу вызь.вает изменение сигнала, выходящего с фазового дискриминатора.
Это к змене:ппо скважности имny.TijCOB -си.ювого ор1ана иропорп,-;онально сумме добавочных (корректирующих) воздойствий. Если сравниваемые колебания пг едетавляют собой две послсдпвательлпсти импульсов, то осунхествление предлагаемого способа воз.можно с номонгью введе1 ия в тракт каждой из частот линий задемх к / с peгyлиpye Ь M временем залаядыв;-Т|; Я (е. фиг. ). Пр отсутствии дополнительного сигнала имнульсы обеих частот задего; иваются на однкакоБСС время. Суммаргый кс рректирующий с;1Г}1ал увел1г- 1,;;ет (умеиьн ает) запаздывание и пульса эталор.ной частоты fs . Тот же корректируюуний син; Л. пропущенный через инвертор 2, в.:зывает умеиынение (увели- е1 не) запаздывания штульса }егулируе.мой частоты. Интегрирующий триггер 3 сразу отмечает это ;змене1 ием CKBa:-:;i:oci i выходных импульсов, пронорц;юналып/.м с ммар1ю у корректируюнему снг;1алу.
Для регулиров;1И1 я времени йиаздыплния Б данном случае удобно с номощью нреобшзователей 4 пилообразного )аиряжения (см. фиг. 2), преобразовать частоты в пилообразные )аПряжен1;я, алгплигуды ivOTo:Vb;x пропопц; ональны средним уровням сравипнаемых величин, с.тожить наг ряже:П е «Г1и, с наиряжен11ем cyiniopiioro донолните.1ьного c}T}:;:.-ia (и ;апря че :ием .енпя, ouecne-iiiiKuon KM npi; OTcyicTJMi: дополнительного с; гнала запа.7:дываь:и.е в полнериод;;), н в :омент из енения напряже Ия на выходе каскада
сразпскня 5 сформировать пмпульс с помощью кпскада формнровл}пш 6.
Все siii операции обычны в системах вертикального управления выпрямителями, а соотБстств клцие устроГ ства представляют собой типовые схемы на транзисторах.
Предмет изобретения
Способ коррекции систем регулирования е фазовыми дискриминаторами, отличающийся
тем, что, с целью улучшения Д1 нямичеоких CBoiicTiJ замкнутой остемы лри унрошепии ее регулирующей части, измеряют -сигнал коррекции и лилией задержки с регулируел;ым заиаздыБлиия едвигают во взашпк) цротивоположных иаиравлециях фазы epauiinвае.мы.х ца фазовом диекримицаторе сигналов двух частот на величину, цропорциоиальную сумме всех корректирующих сигналов.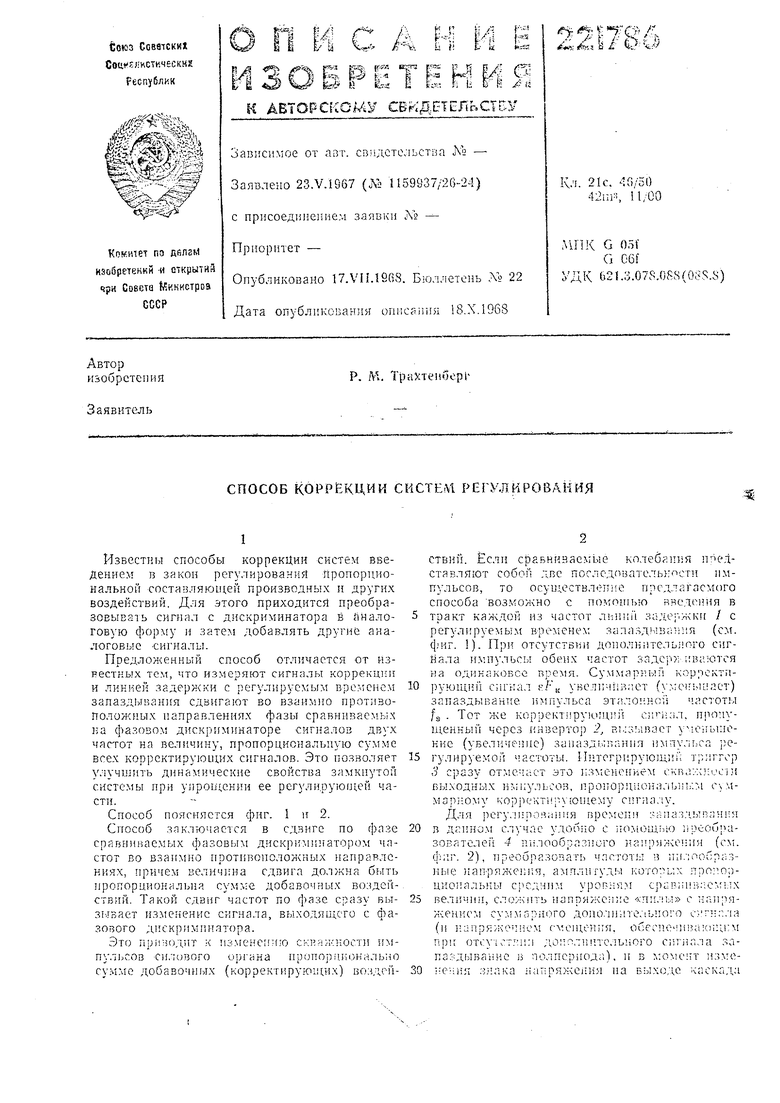
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПОЛНОЙ РАЗНОСТИ ФАЗ ПО «НЕСУЩЕЙ» ЧАСТОТЕ ПСЕВДОП1УМОВЫХ СИГНАЛОВ | 1972 |
|
SU331335A1 |
| СПОСОБ ОСЦИЛЛОГРАФИЧЕСКОГО ИЗМЕРЕНИЯ ФАЗОЧАСТОТНЫХ ХАРАКТЕРИСТИК | 1964 |
|
SU164074A1 |
| Следящий привод | 1977 |
|
SU684507A2 |
| Способ коррекции системы регулирования | 1971 |
|
SU531126A1 |
| УСТРОЙСТВО для ФОТОСЛЕДЯЩЕГО КОПИРОВАНИЯ | 1973 |
|
SU394821A1 |
| СПОСОБ КОМПЕНСАЦИИ ГИСТЕРЕЗИСОВ СТРИКЦИОННЫХ УСТРОЙСТВ | 1992 |
|
RU2069109C1 |
| СПОСОБ ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2006 |
|
RU2307474C1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТИ ДИСКРЕТИЗАЦИИ ДАЛЬНОМЕРНОГО КОДА | 2021 |
|
RU2769113C1 |
| Фазовый дискриминатор | 1988 |
|
SU1598109A1 |
| Стабилизированный электропривод | 1985 |
|
SU1302411A1 |
гл
