Изобретение относится к области радионавигации, а именно к формированию, приему и обработке широкополосных радионавигационных сигналов и может быть использовано для формирования дальномерного кода в аппаратных и программных имитаторах и приемниках сигналов радионавигационных систем спутниковой и наземной радионавигации, включая прецизионную аппаратуру метрологического класса, приемники, расположенные на космических аппаратах (КА), аппаратуру временной синхронизации по сигналам глобальных навигационных спутниковых систем (ГНСС).
В современных радионавигационных системах положение потребителя (пользователя) навигационной системы определяется на основе расстояний между потребителем и опорными станциями (космическими аппаратами) системы, излучающими навигационные сигналы. Определение расстояний осуществляется путем измерения времени распространения навигационных сигналов от опорных станций к приемнику потребителя. В качестве навигационных сигналов, как правило, используются широкополосные сигналы, модулированные дальномерными кодами - псевдослучайными последовательностями (ПСП) нулей и единиц.
Для измерения времени распространения (задержки) сигнала приемник формирует локальную копию дальномерного кода, задержка которого при помощи следящей системы непрерывно подстраивается под задержку входного сигнала. Выходным сигналом дискриминатора следящей системы является сигнал, пропорциональный разности выходных значений двух корреляторов, опорные дальномерные коды которых сдвинуты во времени относительно текущей оценки задержки в сторону опережения и запаздывания на величину, обычно не превышающую половины длительности символа ПСП. По сути, дискриминатор определяет временной сдвиг между переходами символов ПСП входного сигнала и переходами символов ПСП, формируемой в приемнике. Таким образом, информация о задержке входного сигнала извлекается из временных положений переходов между символами ПСП. Управление задержкой формируемого дальномерного кода осуществляется с выхода петлевого фильтра системы слежения путем изменения частоты следования символов ПСП, либо путем непосредственной установки требуемой задержки в управляемый генератор дальномерного кода.
Очевидно, точность измерения задержки принятого сигнала напрямую оказывает влияние на точность определения положения потребителя. Однако, при цифровой реализации алгоритмов обработки принимаемых навигационных сигналов, получившей широкое распространение в силу ряда причин, конечная частота дискретизации приводит к возникновению погрешности дискретизации дальномерного кода, и, как следствие, к погрешности измерения времени распространения навигационного сигнала.
При дискретизации дальномерного кода происходит смещение положений переходов между символами ПСП и, как следствие, смещение нуля дискриминационной характеристики. В общем случае смещение носит случайный характер, равномерно распределено в интервале от нуля до длительности периода дискретизации, зависит от конкретного значения задержки ПСП, самой ПСП и частоты дискретизации.
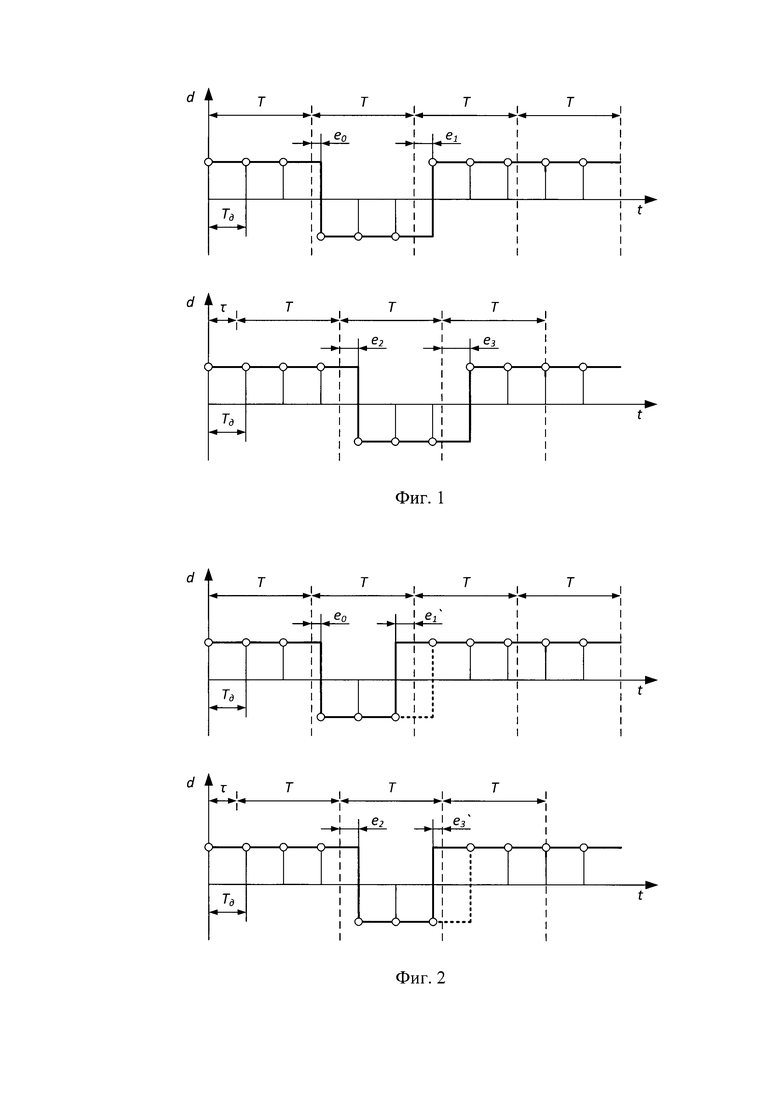
Возникновение смещения переходов между символами ПСП при дискретизации поясняется фиг. 1. В качестве примера приведены временные диаграммы части ПСП, длиной четыре символа, с двумя переходами. Используемые на фиг. 1 обозначения: d-значение символа ПСП, Т-длительность символа ПСП, Тд - период дискретизации. Точки (окружности) обозначают выборки дискретной ПСП. Сплошная линия соответствует формируемой дискретной ПСП. Пунктирными вертикальными линиями отмечены положения границ символов идеальной (не дискретизированной) ПСП. е - величина смещения перехода между символами дискретизированной ПСП относительно идеальной ПСП. Временные диаграммы приведены для нулевой задержки (верхняя диаграмма) и задержки, равной τ (нижняя диаграмма). Из фиг. 1 видно, что среднее значение отклонений переходов между символами ПСП зависит от задержки ПСП. С увеличением длительности ПСП (количества переходов между символами ПСП) происходит усреднение смещений переходов, и результирующая ошибка определения задержки уменьшается. Тем не менее, в ряде задач, итоговое значение ошибки остается неприемлемым.
При измерении изменяющейся задержки (и наличии допплеровского сдвига частоты входного навигационного сигнала) также происходит усреднение ошибки. Однако, при малых и нулевых значениях ДСЧ эффект от усреднения мал или отсутствует.
Необходимость высокоточного формирования дальномерного кода и измерения его задержки возникает в: измерительных станциях наземного сегмента ГНСС; аппаратуре потребителей навигационных систем, находящихся на космических аппаратах; приборах метрологического класса (имитаторов и приемников навигационных сигналов, используемых для калибровки и поверки аппаратуры); аппаратуре временной синхронизации по сигналам ГНСС; задачах измерения расстояния между объектами авиационной и космической техники.
Уменьшение погрешности дискретизации дальномерного кода за счет увеличения частоты дискретизации ограничено в первую очередь такими факторами, как: сложность реализации обработки сигналов на высокой частоте (вычислительные ресурсы), энергопотребление, тепловыделение, массогабаритные характеристики.
Стоит отметить, что в случае кратности частоты дискретизации частоте следования символов ПСП существенно возрастает погрешность дискретизации (статья Dennis М. Akos, Marco Pini, Effect of Sampling Frequency on GNSS Receiver Performance, NAVIGATION: Journal of The Institute of Navigation Vol.м53, No. 2, Summer 2006).
Известен способ уменьшения погрешности дискретизации дальномерного кода заключающийся в вычислении смещения нуля дискриминационной характеристики на основе анализа положений выборок дальномерного кода и последующей коррекции измерений псевдодальности на величину вычисленного смещения (статья Xiaojun Jin, Ning Zhang, Kan Yang и др., PN Ranging Based on Noncommensurate Sampling: Zero-Bias Mitigation Methods, IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 53, NO. 2 APRIL 2017). Другим, предлагаемым в статье способом уменьшения погрешности дискретизации дальномерного кода является выбор особых значений частоты дискретизации, при которых происходит компенсация погрешности при вычитании значений на выходах корреляторов с запаздывающим и опережающим опорными сигналами. Недостатком предлагаемого в статье способа коррекции погрешности, основанного на вычислении смещения нуля дискриминационной характеристики является большой объем вычислений. Выбор особого значения частоты дискретизации затруднен практическими аспектами реализации аппаратуры (настройка синтезаторов, частотный план), невозможен в широко распространенной практике дискретизации сигналов нескольких навигационных систем (ГЛОНАСС, GPS, Galileo) одним аналого-цифровым преобразователем (АЦП). Кроме того, как отмечают авторы статьи, для применения предлагаемого ими способа в случае малой временной расстройки между опережающим и запаздывающим каналами дискриминатора (простой и повсеместно используемый прием по борьбе с многолучевым распространением сигналов) возникает необходимость в высокой частоте дискретизации. Оба, предлагаемых в статье способа, не применимы для реализации в имитаторах навигационных сигналов.
Другим способом коррекции погрешности дискретизации дальномерного кода является предварительное вычисление ошибки дискретизации для всех возможных значений задержки дальномерного кода в интервале от нуля до длительности такта дискретизации (патент ЕР 3 483 632 A1, WO 2019/091769 А1, статья J. - M. Sleewaegen, W. De Wilde, Zero-Doppler Pseudorange Biases, 2018, Septentrio, Belgium). Вычисленное значение ошибки фильтруется с помощью фильтра нижних частот, имеющего те же характеристики, что и основной петлевой фильтр системы слежения за задержкой. Отфильтрованное значение ошибки используется для коррекции измерений псевдодальности. Недостатком данного способа является необходимость в реализации дополнительного фильтра. Кроме того, способ не применим для реализации в имитаторах навигационных сигналов.
Также известен способ уменьшения погрешности дискретизации дальномерного кода, заключающийся в повышении частоты дискретизации входного сигнала с помощью интерполяции (статья П.В. Шаршавин, А.С. Кондратьев, А.В. Гребенников, Применение цифровой регистрации для повышения точностных характеристик измерения псевдодальности по сигналам спутниковых радионавигационных систем ГЛОНАСС/GPS, 2012 Вестник Сибирского государственного аэрокосмического университета имени академика М.Ф. Решетнева; статья П.В. Шаршавин, А.В. Гребенников, Исследование метода постобработки сигналов спутниковых радионавигационных систем с повышением частоты дискретизации, 2017, ООО НПП «Автономные аэрокосмические системы - ГеоСервис», Институт инженерной физики и радиоэлектроники ФГАОУ ВПО «Сибирский федеральный университет», г. Красноярск, https://uavsiberia.com/en/news/issledovanie-metoda-postobrabotki-signalov-sputnikovykh-radionavigatsionnykh-sistem-s-povysheniem-chastoty-diskretizatsii/). Интерполяция осуществляется при помощи экспандера частоты дискретизации и фильтра-интерполятора. Формирование опорного дальномерного кода в приемнике и вычисление корреляционных значений осуществляется на высокой частоте дискретизации. Недостатком данного способа, как отмечают авторы статьи, является необходимость в больших вычислительных затратах. Данный способ может быть использован в режиме постобработки записей навигационных сигналов в программном приемнике, однако его применение в аппаратуре реального времени затруднено. Предлагаемый способ также не может быть использован в имитаторах навигационных сигналов.
Известен также способ коррекции погрешности дискретизации дальномерного кода, заключающийся в ограничении спектра сигнала дальномерного кода (статья П.В. Шаршавин, А.С. Кондратьев, А.В. Гребенников, Уменьшение погрешности дискретизации псевдослучайной последовательности дальномерного кода с помощью ограничения спектра, Системы связи и радионавигации: сб. тезисов / науч. ред. В.Ф. Шабанов; отв. за вып. А.Ю. Строкова. - Красноярск: АО «НПП «Радиосвязь», 2015. -355 с.). Согласно приводимому в статье описанию, ограничение спектра реализуется путем добавления в схему формирования ПСП с аккумулятором фазы дополнительного блока, детектирующего моменты перехода ПСП и воспроизводящего переходной процесс в эти моменты. Уменьшение погрешности дискретизации дальномерного кода при этом достигается за счет того, что при воспроизведении переходного процесса учитывается состояние аккумулятора фазы генератора частоты следования символов ПСП в моменты перехода между символами ПСП, несущее информацию об истинном положении перехода. Воспроизведение переходных процессов в сигнале дальномерного кода, имеющем ограниченный спектр возможно при условии многоуровневого квантования этого сигнала. Недостатком данного способа является усложнение реализации - увеличение количества уровней квантования сигнала дальномерного кода по сравнению с традиционно используемым бинарным квантованием этого сигнала. Увеличение количества уровней квантования влечет за собой усложнение коррелятора (возникает необходимость в запоминающих устройствах, многоразрядном умножителе).
Наиболее близким к заявляемому изобретению является способ коррекции погрешности дискретизации дальномерного кода, заключающийся в смещении временных положений переходов между символами ПСП (статья Vinh Т. Tran, Nagaraj С.Shivaramaiah, Thuan D. Nguyen, Eamonn P. Glennon, Andrew G. Dempster, GNSS receiver implementations to mitigate the effects of commensurate sampling frequencies on DLL code tracking, GPS Solutions, 2018) на случайную величину, принятый в качестве прототипа. В соответствии с прототипом, для уменьшения погрешности дискретизации дальномерного кода положения переходов между символами ПСП смещаются на небольшую случайную величину в пределах длительности такта дискретизации. При этом в качестве величины смещения в статье предлагается использовать случайное значение, либо величину, изменяющуюся по гармоническому или линейному закону. В случае кратности частоты дискретизации и частоты следования символов ПСП способ, описываемый в статье позволяет снизить погрешность дискретизации дальномерного кода. Однако, при некратных частоте дискретизации и частоте следования символов ПСП поскольку значение основного аккумулятора фазы при каждой смене символов ПСП является случайным, добавление дополнительной величины, случайной, либо изменяющейся по гармоническому или линейному закону не устраняет погрешности. Недостатком прототипа является существенно большая величина ошибки, остающейся после коррекции.
Целью данного изобретения является уменьшение погрешности дискретизации дальномерного кода, уменьшение погрешности воспроизведения задержки дальномерного кода, в формируемых имитаторами радионавигационных сигналов и уменьшение погрешности измерения задержки приемниками радионавигационных сигналов.
Указанная цель достигается тем, что при формировании дальномерного кода изменяют временные положения переходов между символами ПСП, а именно, для каждого перехода между символами ПСП вычисляют сумму величины отклонения положения текущего перехода между символами дискретизированной ПСП от истинного положения и суммы отклонений, вычисленной для предыдущих переходов, и, в случае, если полученное суммарное значение величины отклонения является положительным, то выполняют сдвиг текущего перехода между символами ПСП во времени на один такт дискретизации в сторону опережения, при этом расчет последующих сумм отклонений положений переходов между символами ПСП выполняют с учетом выполненной коррекции положения текущего перехода между символами ПСП.
Техническим результатом выполнения указанных выше действий является уменьшение погрешности дискретизации дальномерного кода вследствие уменьшения изменения среднего значения отклонений переходов между символами ПСП, вычисленного на интервале времени, равном периоду ПСП, либо отличающемся от периода ПСП при изменении значения задержки. Временные диаграммы, поясняющие сдвиг перехода между символами ПСП приведены на фиг. 2. Жирными пунктирными линиями показано положение перехода до коррекции.
Предлагаемый способ уменьшения погрешности дискретизации дальномерного кода и способ, используемый в прототипе предполагают выполнение действий непосредственно с переходами дальномерного кода, в отличие от приводимых в описании изобретения аналогов, в которых выполняется коррекция ошибки измерения задержки. Благодаря этому предлагаемый и используемый в прототипе способы могут быть использованы для уменьшения погрешности дискретизации дальномерного кода генераторов как приемников, так и имитаторов радионавигационных сигналов.
Отличием заявляемого изобретения от прототипа является то, что смещение положений переходов между символами ПСП выполняется не случайным образом, а с учетом величины отклонения текущего и предыдущих символов ПСП от истинного значения.
На фиг. 1 приведены временные диаграммы, поясняющие смещение переходов между символами ПСП (возникновение погрешности дискретизации дальномерного кода).
На фиг. 2 приведены временные диаграммы после выполнения коррекции погрешности дискретизации дальномерного кода.
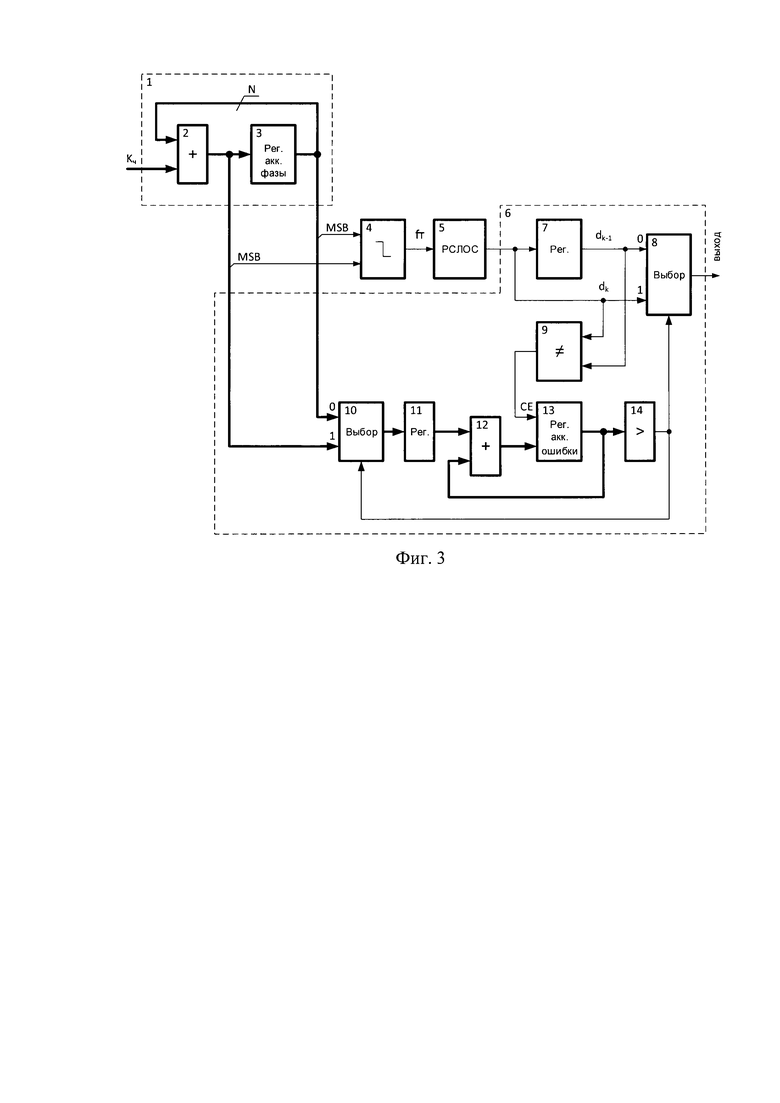
На фиг. 3 приведен пример структурной схемы генератора ПСП, реализующий предлагаемый способ коррекции погрешности дискретизации дальномерного кода.
На фиг. 4 приведена блок-схема алгоритма программной реализации предлагаемого способа коррекции погрешности дискретизации дальномерного кода.
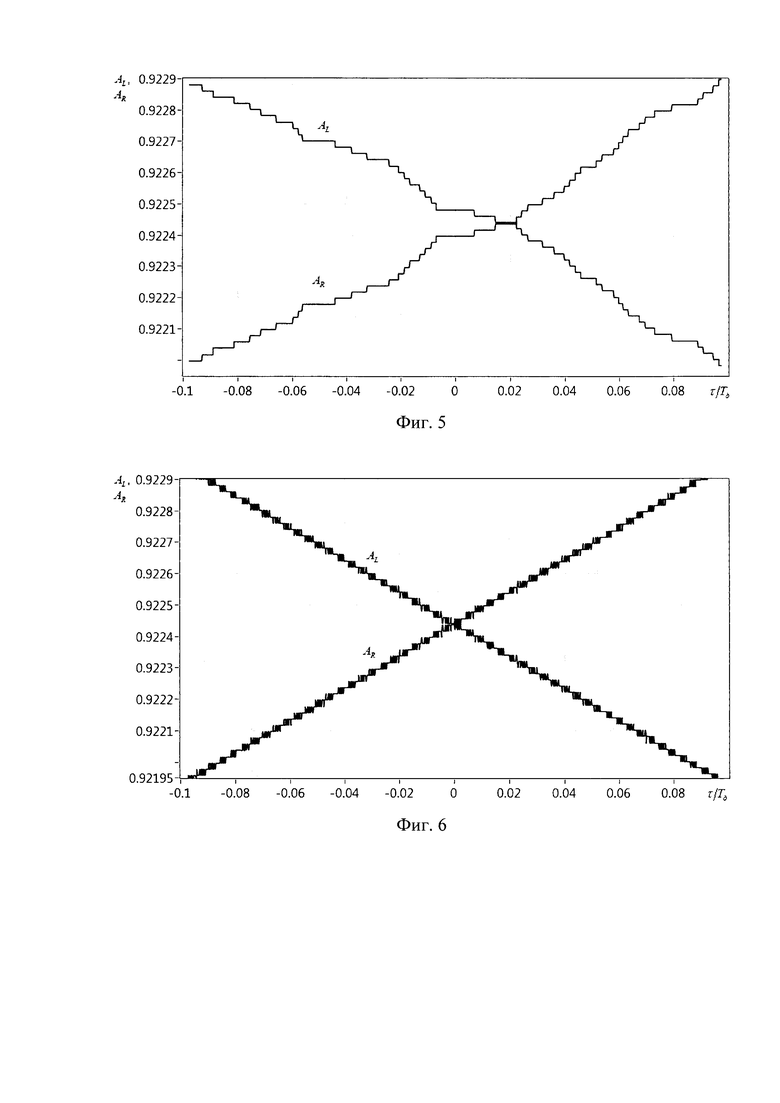
На фиг. 5 приведены графики взаимно-корреляционных функций без коррекции погрешности дискретизации дальномерного кода, полученных путем моделирования.
На фиг. 6 приведены графики взаимно-корреляционных функций с использованием предлагаемого способа коррекции погрешности дискретизации дальномерного кода, полученных путем моделирования.
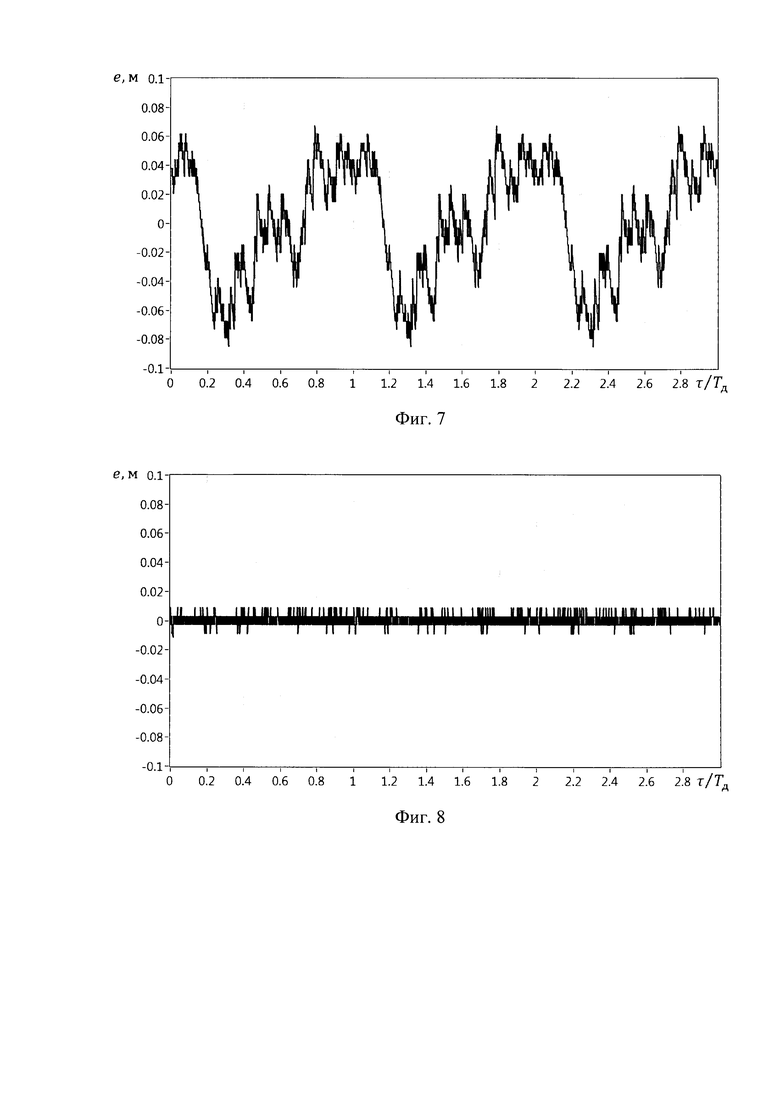
На фиг. 7 приведены графики зависимостей ошибки измерения задержки дальномерного кода от значения задержки входного сигнала без коррекции погрешности дискретизации дальномерного кода, полученных путем моделирования.
На фиг. 8 приведены графики зависимостей ошибки измерения задержки дальномерного кода от значения задержки входного сигнала с коррекцией погрешности дискретизации дальномерного кода, полученных путем моделирования.
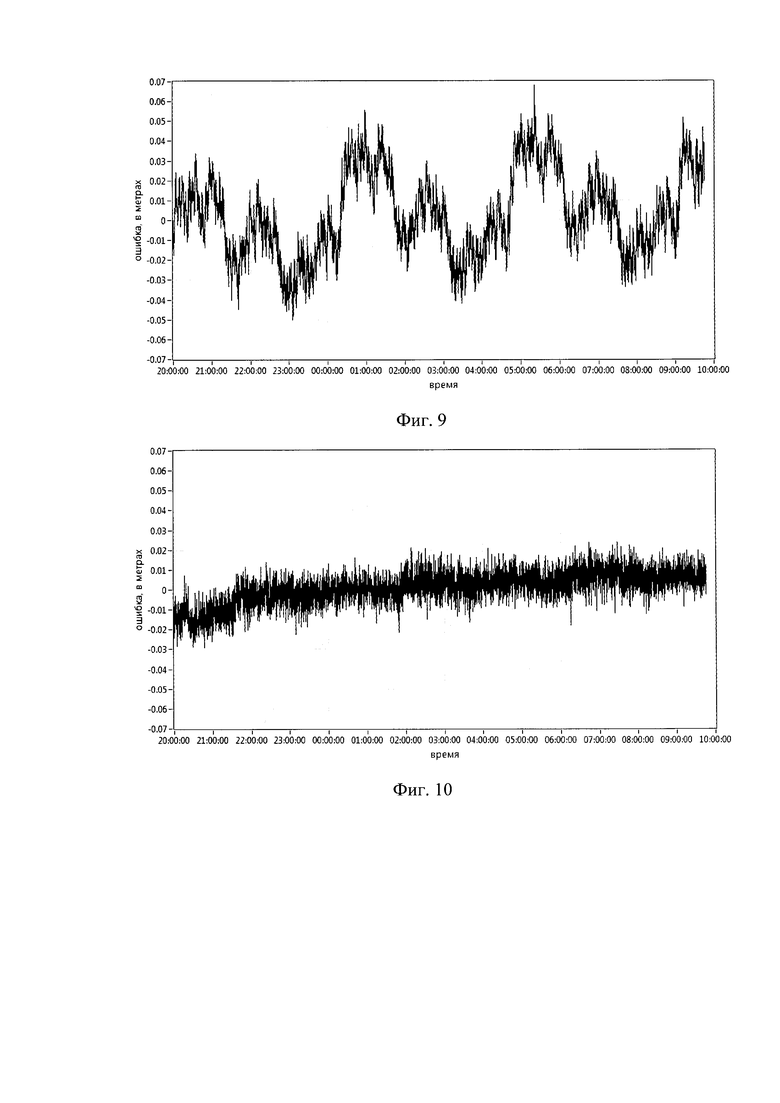
На фиг. 9 приведен график ошибки измерения задержки дальномерного кода без коррекции погрешности дискретизации дальномерного кода, полученной экспериментально.
На фиг. 10 приведен график ошибки измерения задержки дальномерного с коррекцией погрешности дискретизации дальномерного кода, полученной экспериментально.
Пример структурной схемы устройства, реализующего предлагаемый способ коррекции погрешности дискретизации дальномерного кода приведен на фиг. 3.
Формирование тактовой частоты следования символов ПСП (fT) выполняется с помощью аккумулятора фазы 1, содержащего сумматор 2 и регистр аккумулятора фазы 3. N - разрядность аккумулятора фазы. Необходимая частота следования символов задается с помощью кода частоты (Kч), подаваемого на второй вход сумматора 2. Блок 4 выполняет детектирование переходов старшего бита аккумулятора фазы от логического уровня "1" к логическому уровню "0". MSB - most significant bit (старший значащий бит). По сигналу тактовой частоты следования символов ПСП (с выхода блока 4) происходит сдвиг регистра сдвига с линейной обратной связью (РСЛОС, блок 5) либо переход к очередной ячейке памяти в случае табличного формирования ПСП. В традиционной схеме генератора дальномерного кода выход блока 5 является выходом схемы.
Для реализации предлагаемого способа уменьшения погрешности дискретизации дальномерного кода схема (фиг. 3) дополняется блоком 6, вычисляющим сумму (блок 12) величины отклонения положения текущего перехода между символами дискретизированной ПСП от истинного положения и суммы отклонений, вычисленной для предыдущих переходов. Для вычисления величины отклонения на текущем переходе между символами ПСП от истинного значения используется значение аккумулятора фазы тактовой частоты ПСП. Значение суммы отклонений переходов (регистр 13) обновляется в случае, если (условие реализуется при помощи сигнала на входе разрешения тактовой частоты - СЕ) очередной символ dk отличается от предыдущего dk-1 (блок 9). Регистр 7 служит для задержки формируемых символов ПСП на один такт дискретизации. Если значение суммы отклонений положений переходов между символами ПСП от истинного значения является положительным (блок 14), то на выход с помощью элемента выбора (блок 8) выдается незадержанный символ ПСП (выполняется коррекция положения перехода между символами ПСП). При отрицательном значении ошибки, накопленной в аккумуляторе ошибки (блок 9), коррекция положения перехода между символами ПСП не выполняется и на выход выдается символ ПСП, задержанный на один такт дискретизации. При каждой смене символа ПСП значение аккумулятора ошибки 13 обновляется на величину отклонения текущего перехода от требуемого значения с учетом того, проводится коррекция или нет (блок 10). Регистр (блок 11) предназначен для учета задержки, возникающей в РСЛОС.
Примером программной реализации способа коррекции погрешности дискретизации дальномерного кода является алгоритм, блок-схема которого приведена на фиг.4.
В блок-схеме использованы следующие обозначения: е - сумма величин отклонения переходов между символами ПСП; dk - текущий символ ПСП; dk-1 - предыдущий символ ПСП; acc - состояние аккумулятора фазы генератора тактовой частоты ПСП в текущий момент времени; increment -приращение аккумулятора фазы генератора тактовой частоты ПСП (код частоты); forbid - флаг запрещения формирования импульса тактовой частоты (выполняет функцию, аналогичную блокам 5, 10 на фиг.3 при аппаратной реализации); MSB - старший значащий бит аккумулятора фазы.
Возможность осуществления изобретения подтверждается результатами программного моделирования и эксперимента с использованием отладочной платы, содержащей систему на кристалле Xilinx Zynq-7000, синтезаторы опорных частот, смеситель, цифро-аналоговый преобразователь, и высокоскоростного цифрового осциллографа.
Моделирование проводилось для сигнала ГЛОНАСС-М, ПСП стандартной точности. Формирование входного сигнала выполнялось на частоте дискретизации 10 ГГц. Далее выполнялась фильтрация входного сигнала полосовым фильтром, с характеристиками аналогичными используемым фильтрам в радионавигационных приемниках, и децимация с целью понижения частоты дискретизации до значения 100 МГц. Ошибка измерения задержки сигнала оценивалась по смещению нуля дискриминационной характеристики. Моделирование проведено для двух вариантов формирования ПСП: без применения способа коррекции погрешности дискретизации дальномерного кода и с применением предлагаемого способа. На фиг. 5 приведены полученные в ходе моделирования графики взаимно-корреляционных функций входного и опорного сигналов, вычисленные с помощью двух корреляторов, опорные дальномерные коды которых расстроены на величину, равную нескольким тактам дискретизации. На фиг. 6 приведены графики ВКФ, получаемые при использовании способа коррекции погрешности дискретизации дальномерного кода. Кривая AL (фиг. 5, 6) соответствует коррелятору с опережающим опорным дальномерным кодом, кривая AR - коррелятору с отстающим опорным дальномерным кодом. По горизонтальной оси отложена временная расстройка между задержкой входного сигнала и задержкой опорного сигнала, нормированная к длительности периода дискретизации Тд. Как видно из графиков, применение способа уменьшения погрешности дискретизации дальномерного кода приводит к уменьшению погрешности, получаемых взаимно-корреляционных функций. Зависимости ошибок измерения задержки от значения задержки входного сигнала приведены на фиг.7 (без коррекции погрешности дискретизации дальномерного кода), фиг.8 (с коррекцией по предлагаемому способу).
Для подтверждения возможности достижения технического результата (уменьшения погрешности дискретизации дальномерного кода) был проведен эксперимент по формированию реального навигационного сигнала ГЛОНАСС стандартной точности в частотном диапазоне L1 с использованием предлагаемого способа коррекции погрешности дискретизации дальномерного кода.
Формирование сигнала осуществлялось при помощи имитатора радионавигационных сигналов, реализованного на отладочной плате, содержащей систему на кристалле Zynq-7000, синтезаторы опорных частот, смеситель и цифро-аналоговый преобразователь.
Цифровая часть имитатора была реализована в программируемой пользователем вентильной матрице микросхемы Zynq-7000. Один из каналов формирования навигационного сигнала, содержал генератор тактовой частоты ПСП, выполненный в соответствии с фиг. 3, т.е. с применением предлагаемого способа коррекции погрешности дискретизации дальномерного кода, другой канал имитатора содержал традиционный вариант генератора. Процессорная часть Zynq-7000 использовалась для управления цифровой частью имитатора, включая расчет кодов частот, начальных значений аккумуляторов фазы генераторов опорного колебания и тактовой частоты ПСП на основе задаваемой задержки формируемого сигнала.
Формирование навигационного сигнала выполнялось на частоте дискретизации, равной 190 МГц, затем с помощью смесителя осуществлялся перенос сигнала на частоту 1602 МГц. Скорость изменения задержки навигационного сигнала, устанавливаемой в имитатор, была задана равной 0.1 мм/с. Такая низкая скорость изменения задержки навигационного сигнала позволила получить значения ошибок измерения задержки для всех возможных положений переходов между символами ПСП. При этом для изменения задержки на величину, равную длительности такта дискретизации, требовалось 4 часа 23 минуты. В ходе одного сеанса эксперимента общее изменение задержки составляло около трех тактов дискретизации.
Оценка задержки формируемого навигационного сигнала выполнялась путем программного анализа записей сигнала, получаемых при помощи высокоскоростного цифрового осциллографа, работающего на частоте 5 ГГц. Для определения ошибки измерения задержки использовались разности кодовых (измеряемых по задержке дальномерного кода) и фазовых (измеряемых по фазе несущего колебания) псевдодальностей. На фиг. 9 приведен график ошибки измерения кодовой псевдодальности без коррекции погрешности дискретизации дальномерного кода. Фиг. 10 - ошибка измерения кодовой псевдодальности при использовании в имитаторе предлагаемого способа коррекции. Результаты эксперимента свидетельствуют об эффективности предлагаемого способа коррекции погрешности дискретизации дальномерного кода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Помехоустойчивая дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2784802C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2802323C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Способ навигации с использованием абонентского терминала и абонентский терминал | 2023 |
|
RU2837647C1 |
| Способ, реализующий точную помехоустойчивую синхронизацию опорных станций локальной навигационной системы | 2023 |
|
RU2827095C1 |
| ИМИТАТОР РАДИОСИГНАЛОВ НАВИГАЦИОННОЙ СИСТЕМЫ | 1978 |
|
SU1840883A1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |

Изобретение относится к области радионавигации, а именно к формированию, приему и обработке широкополосных радионавигационных сигналов, и может быть использовано для формирования дальномерного кода в аппаратных и программных имитаторах и приемниках сигналов радионавигационных систем спутниковой и наземной радионавигации, включая прецизионную аппаратуру метрологического класса, приемники, расположенные на космических аппаратах, аппаратуру временной синхронизации по сигналам глобальных навигационных спутниковых систем. Техническим результатом является уменьшение погрешности дискретизации дальномерного кода вследствие уменьшения изменения среднего значения отклонений переходов между символами псевдослучайной последовательности (ПСП), вычисленного на интервале времени, равном периоду ПСП либо отличающемся от периода ПСП при изменении значения задержки. Способ коррекции погрешности дискретизации дальномерного кода заключается в расчете для каждого перехода между символами ПСП суммы величины отклонения положения текущего перехода между символами дискретизированной ПСП от требуемого положения и суммы отклонений, вычисленной для предыдущих переходов, и сдвиге текущего перехода между символами ПСП во времени на один такт дискретизации в сторону опережения. Сдвиг текущего перехода между символами ПСП выполняется, если полученное суммарное значение величины отклонения является положительным. Расчет последующих сумм отклонений положений переходов между символами ПСП выполняется с учетом выполненной коррекции положения текущего перехода между символами ПСП. 10 ил.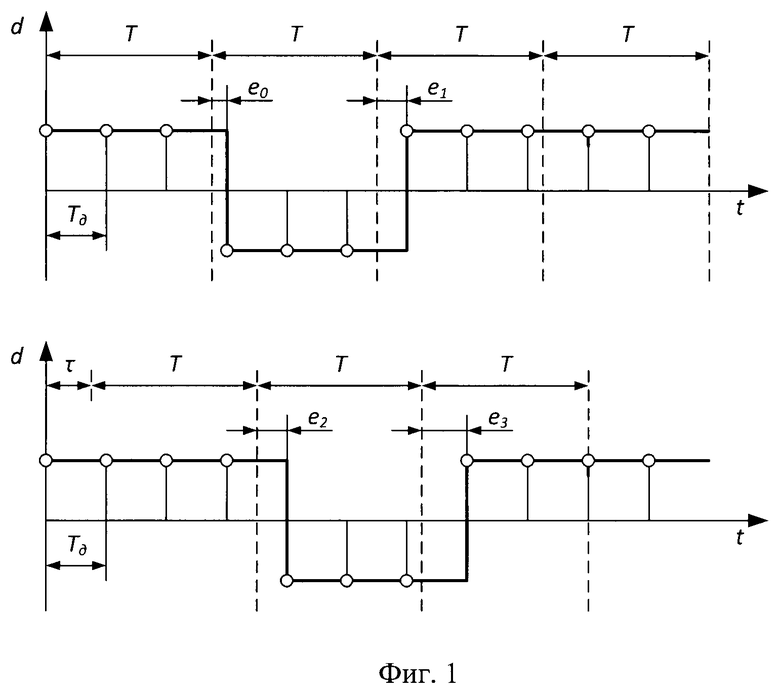
Способ коррекции погрешности дискретизации дальномерного кода, заключающийся в смещении временных положений переходов между символами псевдослучайной последовательности (ПСП), отличающийся тем, что для каждого перехода между символами ПСП вычисляют сумму величины отклонения положения текущего перехода между символами дискретизированной ПСП от требуемого положения и суммы отклонений, вычисленной для предыдущих переходов, и в случае, если полученное суммарное значение величины отклонения является положительным, то выполняют сдвиг текущего перехода между символами ПСП во времени на один такт дискретизации в сторону опережения, при этом расчет последующих сумм отклонений положений переходов между символами ПСП выполняют с учетом выполненной коррекции положения текущего перехода между символами ПСП.
| VINH Т | |||
| TRAN, NAGARAJ С.SHIVARAMAIAH, THUAN D | |||
| NGUYEN, EAMONN P | |||
| GLENNON, ANDREW G | |||
| DEMPSTER, GNSS receiver implementations to mitigate the effects of commensurate sampling frequencies on DLL code tracking // GPS Solutions, 2018 | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| no | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| XIAOJUN JIN, NING ZHANG, KAN YANG XUEMIN (SHERMAN) | |||

