113
Изобретение относится к электро- тех1шке и может быть использовано в высокоточных стабилизированных элект- роприводах.
Целью изобретения является шение качества переходных процессов и снижение их длительности
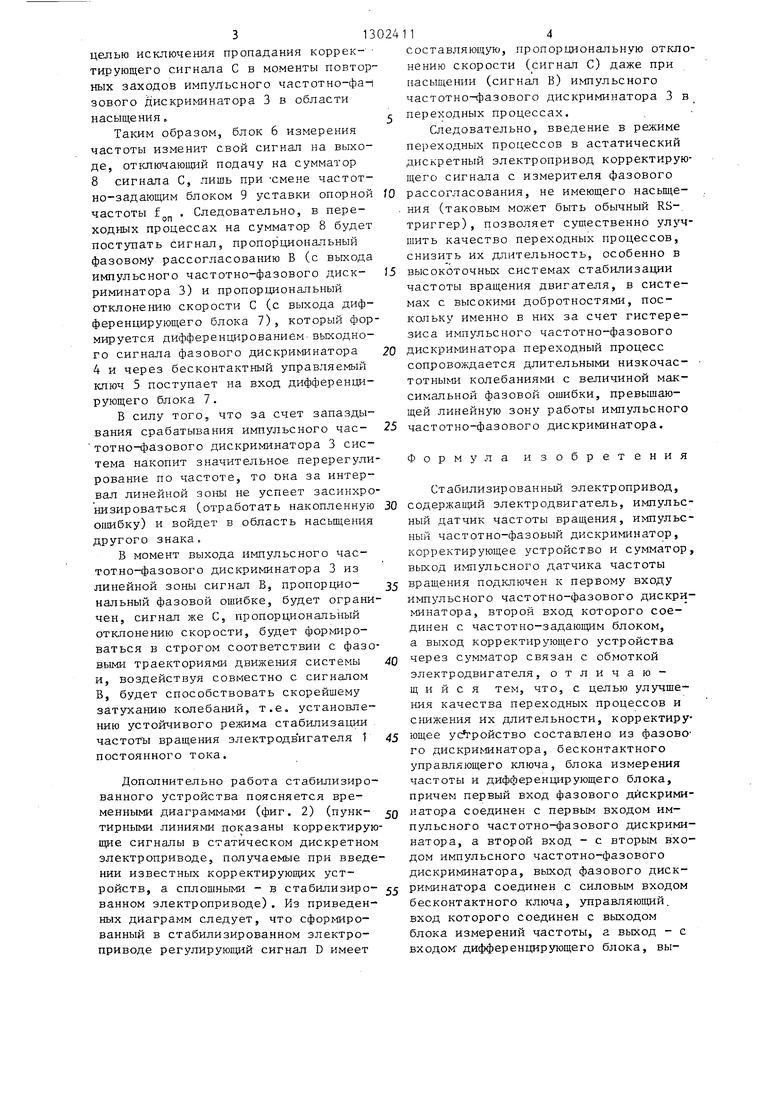
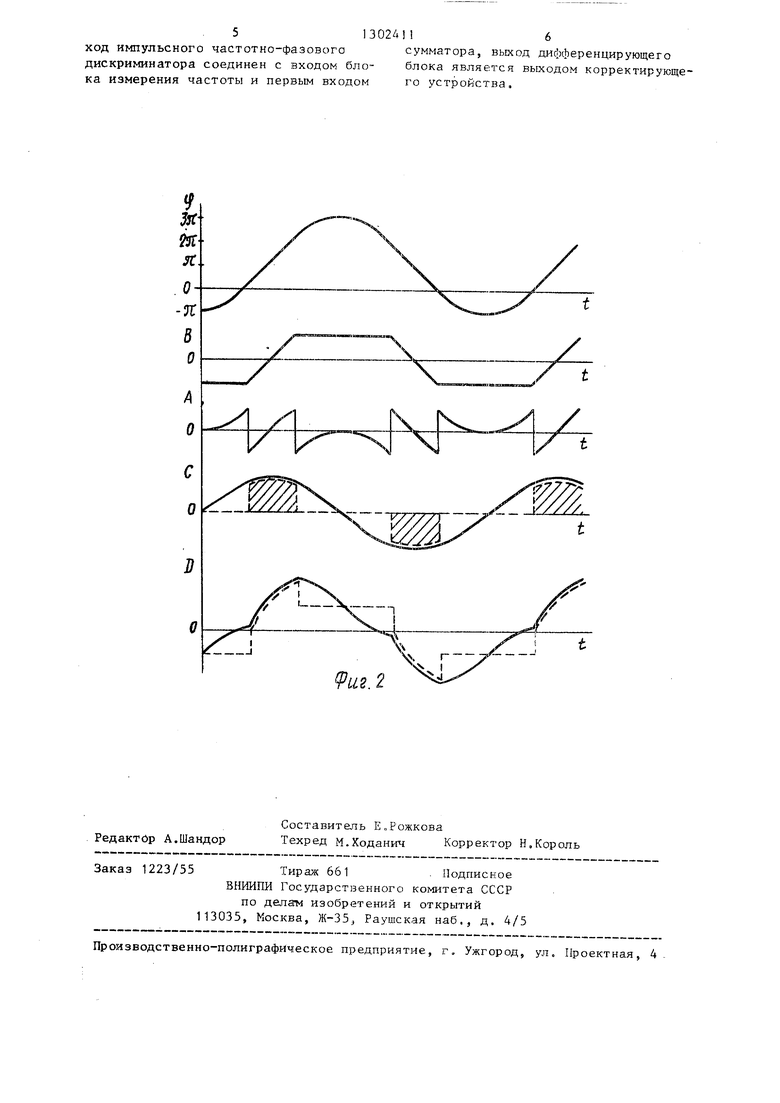
На фиг, 1 представлена блок-схена стабилизированного электропривода на фиг. 2 - диаграммы работы стабилизированного злектропривода в переходном процессе.
Стабилизированный электропривод содерлдат электродвигатель 1, импульс- датчик 2 частоты вращения , им- пульсный частотно-фазовый дискриминатор 3, корректирующее устройство, состоящее из фазового дискриминатора 4, бесконтактного ключа 5, блока 6 измерения частоты и дифференпирующег блока 7, сумматор 8, частотно-задающий блок 9 и силовой преобразователь 10, причем выход импульсного датчика 2 частоты враще ния подключе - к первому входу импульсного частотно-фазового дискриминатора 3 и первому входу фазового дискриминатора, 4. второй вход импульсного частотно-фазо)зо го дискриминатора 3 соединен с вторым входом фазового дискриг-данатора 4 и выходом частотно-задающего блока 9j выход фазового дискри шнатора 4 соединен с входом бесконтактного ключа 5, управляющий вход которого соединен с выходом блока 6 измерения частоты, а выход - с входом дифференцирующего блока 7s причем выход импульсного частотно-фазового дискриминатора 3 соединен с входом блока 6 измерения частоты и первым входом сумматора 8, выход дифференцирующего блока 7 соединен с вторым входом сумматора 8, а выход сумматора 8 под 1шючен через силовой преобразоват ;ш 10 к якорной обмотке электродвигателя 1 ,
Наиболее эффективное действие по улучшению устойчивости и качества переходных процессов оказывает допол нительный, корректирующий сигнал по отклонению скорости, которьп формируется корректирующим устройством, подключенным к выходу импульсного частотно-(Ьазового дискриминач ора.
В переходных процессах за счет гистерезиса характеристики импульсного частотно-фазового дискри1Ф1на- тора при неблагоприятных ситуащшх
0
25
к,
С
.30
ч и
50
фазового расположения импульсов сраз- Ш1ваемых частот (в момент их равенства) в астатическом дискретном электроприводе могут возникать низкочастотные колебания, выводящие измеритель фазового рассогласования - импульсный частотно-фазовый дискриминатор - из линейного режима в режим насыщен.ия.
В стабилизироваь- юм электроприводе (фиг,, 1) коррект 1рую 11дй сигнал по отклонению скорости в переходных пропессах формируется путем дифферен- цирования сигнала с дополнительно введенного фазового д,искриминатора 4, ме имеющегг иелипейьюсти типа Hii- С1|11цение „
Далее сфор 11-:рованный корректирую- ;щ-1Й сигнал сумлируется с выходным , пронормионапьным фазовой опибке импульс,чого частотно-фазового дискрр1ммнатора5 обладающего блоки- розкой от опрокидывания (насыщением), ,и поступает чзрез CUJSOBOE преобразователь 10 на электродвигатель в качестве регулирующего сигнала, j
Ст а били знр (,1В а 1ПШК эл е ктр опри вод
Работает следуюпщм- образом.
При включении пит ания электродвигатель 1 постоянного тока разгоняется до частоты вращег-ия, при которой частоты частотно-за;1ающего блока 9 и импул ;С |-,огчэ датчика 2 частоты
ра)зны. При этом и шyльc- гый частотно-фазозый дискриминатор i -:ахо,-т,ится и насыщении ,и вследствие I, IL с, т ере; з ис; а н ам 1ч е с кой х ар акт ери с - ,1-|:-:и пррпзедет к дал 1:,нейшему разгону :),пектрод;л;1 атсля 1 по тех пор, пока ас наступит б,: го:;рнятное фазовое :;(::с1ожение импут:ьсов часто ных после- до ательностей ,Ер„ и f-,,. , С этого момента времеы- начинается линейный рслсим работы импульсного частотно- фазового дискриминатора 3. При входе ::оследнего з л -1нейную зону на его iib:: U),;i:e появится: импульсный сигнал В, ГО которому блок б измерения частоты 1,5Ь;полняющ -1Й pojib индикатора синхронизации) сфор1 ,,и рует сигна-п Y., кото- :м.-1й бес1;онтактный управляемый 5 обеспечит подключение к входу .:;1фференц 4рую1дего блока 7 выходного сигнала фазозог о ;.1,искриминатора 4. срабать Бания блока 6 измерения частоты по частоте устан.авливается несколько Н1ше частоть, возможных низкочастотных колебаний в системе с
31
целью исключения пропадания коррек- тирующего сигнала С в моменты повторных заходов импульсного частотно-фазового дискриминатора 3 в области насыщения.
Таким образом, блок 6 измерения частоты изменит свой сигнал на выходе, отключаю1ций подачу на сумматор 8 сигнала С, лишь при Смене частотно-задающим блоком 9 уставки опорной частоты . Следовательно, в переходных процессах на сумматор 8 будет поступать сигнал, пропорциональный фазовому рассогласованию В (с выхода импульсного частотно-фазового диск- риминатора 3) и пропорциональный отклонению скорости С (с выхода дифференцирующего блока 7), который формируется дифференцированием выходного сигнала фазового дискриминатора 4 и через бесконтактный управляемый ключ 5 поступает на вход дифференцирующего блока 7.
В силу того, что за счет запаздывания срабатывания импульсного час- тотно-фа:зового дискриминатора 3 система накопит значительное перерегулирование по частоте, то она за интервал линейной зоны не успеет засинхро низироваться (отработать накопленную ошибку) и войдет в область насыщения другого знака.
В момент выхода импульсного частотно-фазового дискриминатора 3 из линейной зоны сигнал В, пропорцио- нальный фазовой ошибке, будет ограничен, сигнал же С, пропорциональный отклонению скорости, будет формироваться в строгом соответствии с фазовыми траекториями движения системы и, воздействуя совместно с сигналом В, будет способствовать скорейшему затуханию колебаний, т.е. установлению устойчивого режима стабилизации частоты вращения электродв игателя Г постоянного тока.
Дополнительно работа стабилизированного устройства поясняется временными диаграммами (фиг, 2) (пунк- тирными линиями показаны корректирующие сигналы в статическом дискретном злектроприводе, получаемые при введении известных корректируюш 1х устройств, а сплошными - в стабилизиро- ванном злектроприводе). Из приведенных диаграмм следует, что сформированный в стабилизированном электроприводе регулирующий сигнал D имеет
114
составляющую, пропорциональную отклнению скорости (сигнал С) даже при насыщении (сигнал В) импульсного частотно-фазового дискриминатора 3 в переходных процессах.
Следовательно, введение в режиме переходных процессов в астатический дискретный электропривод корректирующего сигнала с измерителя фазового рассогласования, не имеющего нacьш e- ния (таковым может быть обычный RS-. триггер), позволяет существенно улучшить качество переходных процессов, снизить их длительность, особенно в высокоточных системах стабилизации частоты вращения двигателя, в системах с высокими добротностями, поскольку именно в них за счет гистерезиса импульсного частотно-фазового дискриминатора переходный процесс сопровождается длительными низкочастотными колебаниями с величиной максимальной фазовой ошибки, превышающей линейную зону работы импульсного частотно-фазового дискриминатора.
Формула изобретения
Стабилизированный электропривод, содержащий электродвигатель, импульсный датчик частоты вращения, импульсный частотно-фазовый дискриминатор, корректирующее устройство и сумматор выход импульсного датчика частоты вращения подключен к первому входу импульсного частотно-фазового дискриминатора, второй вход которого соединен с частотно-задающим блоком, а корректирующего устройства через сумматор связан с обмоткой электродвигателя, отличающийся тем, что, с целью улучшения качества переходных процессов и снижения их длительности, корректирующее устройство составлено из фазово го дискриминатора, бесконтактного управляющего ключа, блока измерения частоты и дифференцирующего блока, причем первый вход фазового дискриминатора соединен с первым входом импульсного частотно-фазового дискриминатора, а второй вход - с вторым входом импульсного частотно-фазового дискриминатора, выход фазового дискриминатора соединен с силовым входом бесконтактного ключа, управляюшдй. вход которого соединен с выходом блока измерений частоты, а выход - с ВХОДОМ дифференцирующего блока, вы51302ДМ6
ход импульсного частотно-фазовогосумматора, выход дифференцирующего
дискриминатора соединен с входом бло- блока является выходом корректирующе- ка измерения частоты и первым входомго устройства.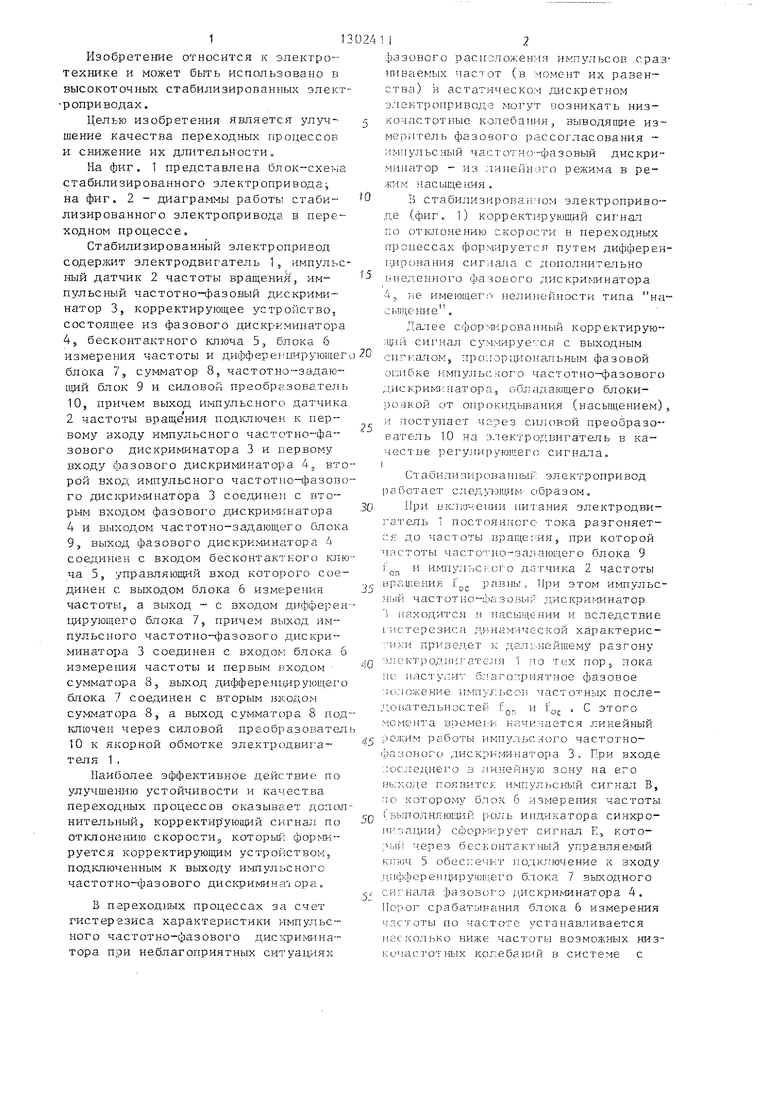
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2585241C1 |
| Стабилизированный электропривод | 1987 |
|
SU1508334A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Устройство для управления статическим преобразователем частоты | 1982 |
|
SU1125731A1 |
| Устройство для управления многодвигательным электроприводом | 1984 |
|
SU1220098A1 |
| Синхронизированный вентильный электродвигатель | 1984 |
|
SU1251279A1 |
| Электропривод постоянного тока | 1986 |
|
SU1334339A1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1970 |
|
SU266022A1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
Изобретение относится к электротехнике и м.б, использовано в высокоточных электроприводах. Целью изоб- рете1Ш,я является улучшение качества переходных процессов и снижение- их длительности. Электропривод содержит электродвигатель 1, питаю1цийся от силового преобразователя 10, импульсный датчик частоты вращения 2, частотно-задающий блок 9 и устройство коррекции, состоящее из фазового дискриминатора 4, бесконтактного ключа 5, блока измерения частоты 6 и дифференцирующего блока 7. Коррек1И- рующий сигнал, про порциональный отклонению скорости в переходных режимах, формируется дифференцированием выходного сигнала фазового дискриминатора, не имеющего нелинейности типа насыщение. Далее корректиру ющий сигнал суммируется на сумматоре 8 с выходным сигналом частотно-фазового . дискриминатора 3 и подается на электродвигатель 1 через силовой преобразователь 10 в качестве регулирующего сигнала. 2 ил. (О (Л (i) ;о чэ фиг. 1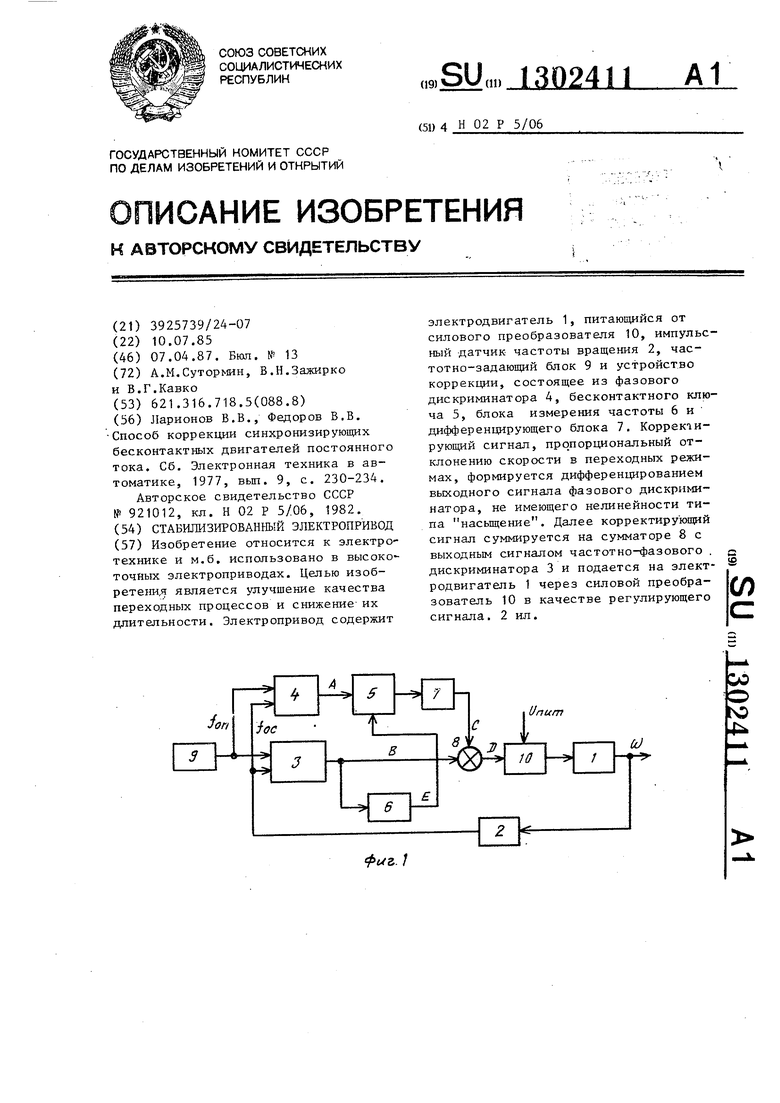
Ж ИГ
л
УГ
в
о
А О
с о
J)
v
/
Vui. 2
Редактор А.Шандор
Составитепь Е„Рожкова
Техред M.Xoдaн rчКорректор Н,Король
1223/55
Тираж 661. Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, M-35j Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Ларионов В.В., Федоров В.В | |||
| Способ коррекции синхронизирующих бесконтактных двигателей постоянного тока | |||
| Сб | |||
| Электронная техника в автоматике, 1977, вып | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
| Устройство для стабилизации скорости и фазы вращения ротора электродвигателя постоянного тока | 1979 |
|
SU921012A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
